咸鱼ZTMS实例—模拟交通灯
主控板:ZTMS1.1python开发板

交通信号灯模块

信号灯引脚
| 引脚 | 说明 |
|---|---|
| GND | 接地引脚: |
| R | 输出引脚 控制红灯 |
| Y | 输出引脚 控制黄灯 |
| G | 输出引脚 控制绿灯 |
使用方法
首先我们需要导入pyb中的Pin模块,然后就可以定义一个Pin对象, 及其使用的引脚和功能。
from pyb import Pin
p_Rout = Pin("A0",Pin.OUT_PP) #设置为推挽方式输出,输出引脚"A0" 红色
p_Yout = Pin("A1",Pin.OUT_PP) #设置为推挽方式输出,输出引脚"A1" 黄色
p_Gout = Pin("A2",Pin.OUT_PP) #设置为推挽方式输出,输出引脚"A2" 绿色
对于GPIO的输出,我们可以使用下面方法控制:
cs.high() #设置高电平
cs(1)
cs.low() #设置低电平
cs(0)
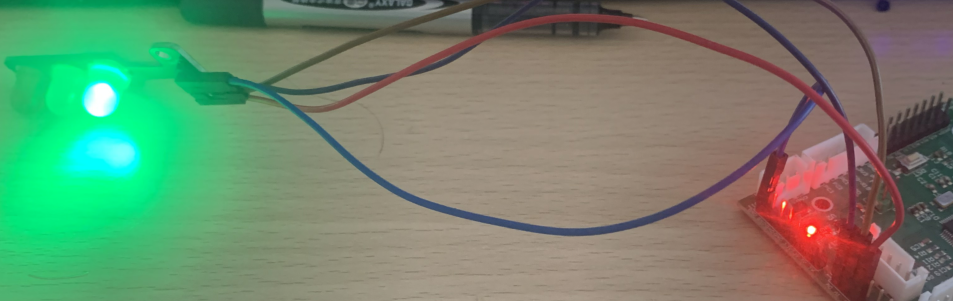
输出一般为高电平激活,低电平关闭功能。只让绿灯亮,实现方法为绿色为高点其他为低电
设置高低电平代码为
from pyb import Pin
p_Rout = Pin("A0",Pin.OUT_PP) #设置为推挽方式输出,输出引脚"A0" 红色
p_Yout = Pin("A1",Pin.OUT_PP) #设置为推挽方式输出,输出引脚"A1" 黄色
p_Gout = Pin("A2",Pin.OUT_PP) #设置为推挽方式输出,输出引脚"A2" 绿色
p_Rout.low()
p_Yout.low()
p_Gout.high()
效果
还可以这样写
from pyb import Pin
p_Rout = Pin("A0",Pin.OUT_PP) #设置为推挽方式输出,输出引脚"A0" 红色
p_Yout = Pin("A1",Pin.OUT_PP) #设置为推挽方式输出,输出引脚"A1" 黄色
p_Gout = Pin("A2",Pin.OUT_PP) #设置为推挽方式输出,输出引脚"A2" 绿色
p_Rout.low()
p_Yout.low()
p_Gout.high()
pyb.delay(3000)
p_Rout(1)
p_Yout(0)
p_Gout(0)
效果为先亮绿灯3秒后红灯亮
案例:模拟交通信号灯
# main.py -- put your code here!
from pyb import Pin
p_Rout = Pin("A0",Pin.OUT_PP) #设置为推挽方式输出,输出引脚"A0" 红色
p_Yout = Pin("A1",Pin.OUT_PP) #设置为推挽方式输出,输出引脚"A1" 黄色
p_Gout = Pin("A2",Pin.OUT_PP) #设置为推挽方式输出,输出引脚"A2" 绿色
while True:
p_Rout(1)
p_Yout(0)
p_Gout(0)
pyb.delay(5000) #红灯亮5秒
p_Rout(0)
p_Yout(1)
p_Gout(0)
pyb.delay(5000) #黄灯亮5秒
p_Rout(0)
p_Yout(0)
p_Gout(1)
pyb.delay(4000) #绿灯亮4秒
最后
以上就是负责猎豹最近收集整理的关于咸鱼ZTMS实例—模拟交通灯的全部内容,更多相关咸鱼ZTMS实例—模拟交通灯内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复