Linux系统选择的是Ubuntu16.04,因此对应的ROS选择的版本是ROS Kinetic
1、配置软件库如下图
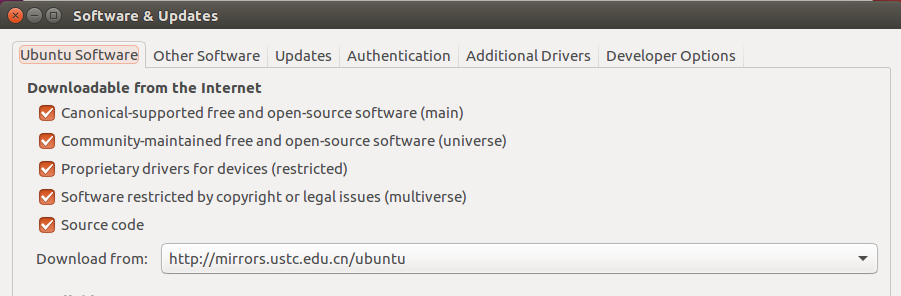
这里选择的是中科大的源,后续也使用该源
2、设置软件源
打开/etc/apt/source.list,将下面的内容加入
deb http://debian.ustc.edu.cn/ubuntu/ trusty main multiverse restricted universe
deb http://debian.ustc.edu.cn/ubuntu/ trusty-backports main multiverse restricted universe
deb http://debian.ustc.edu.cn/ubuntu/ trusty-proposed main multiverse restricted universe
deb http://debian.ustc.edu.cn/ubuntu/ trusty-security main multiverse restricted universe
deb http://debian.ustc.edu.cn/ubuntu/ trusty-updates main multiverse restricted universe
deb-src http://debian.ustc.edu.cn/ubuntu/ trusty main multiverse restricted universe
deb-src http://debian.ustc.edu.cn/ubuntu/ trusty-backports main multiverse restricted universe
deb-src http://debian.ustc.edu.cn/ubuntu/ trusty-proposed main multiverse restricted universe
deb-src http://debian.ustc.edu.cn/ubuntu/ trusty-security main multiverse restricted universe
deb-src http://debian.ustc.edu.cn/ubuntu/ trusty-updates main multiverse restricted universe
保存后执行
sudo apt-get update
sudo apt-get upgrade
3、添加source.list
sudo sh -c 'echo "deb https://mirrors.ustc.edu.cn/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
4、添加公钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
5、安装
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
6、初始化
sudo rosdep init
此处如果出现网址不可达执行下面的命令
sudo c_rehash /etc/ssl/certs
sudo -E rosdep init
之后再执行
rosdep update
7、配置ROS环境
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
8、安装依赖项
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
到此,ROS安装完毕!
最后
以上就是无情牛排最近收集整理的关于新手ubuntu16.04安装ROS的全部内容,更多相关新手ubuntu16内容请搜索靠谱客的其他文章。








发表评论 取消回复