第一部分是安装kinect2的驱动libfreenect2 。
第二部分是kinect2的ROS包iai_kinect2。
1)libfreenect2
git clone https://github.com/OpenKinect/libfreenect2.git
cd libfreenect2
sudo apt-get install build-essential cmake pkg-config libusb-1.0-0-dev libturbojpeg libjpeg-turbo8-dev
sudo apt-get install libglfw3-dev libopenni2-dev
cd ..
mkdir build && cd build
cmake .. -DENABLE_CXX11=ON
make
make install
sudo cp ../platform/linux/udev/90-kinect2.rules /etc/udev/rules.d/#配置接口协议,注意运行目录为上一层的目录
重新插拔kinect2,之后运行。后面参数可选一个。具体看帮助文档
./bin/Protonect [gl | cuda | cpu]#运行例程,测试kinect是否连接成功
2)ROS中使用kinect2 (要先安装依赖包,除了必选包,注意安装可选包opencl,否则会出现问题)
catkin_ws文件夹是ros安装后创作的工作空间。可按以下命令创建
mkdir -p ~/catkin_ws/src
cd
~/catkin_ws/srccatkin_init_workspace
cd
..catkin_make
cd ~/catkin_ws/src/
git clone https://github.com/code-iai/iai_kinect2.git
cd iai_kinect2
rosdep install -r --from-paths .
cd ~/catkin_ws
catkin_make -DCMAKE_BUILD_TYPE="Release"
roslaunch kinect2_bridge kinect2_bridge.launch
rosrun image_view image_view image:=/kinect2/hd/image_color
测试新开终端:
roslaunch kinect2_bridge kinect2_bridge.launch
新开终端:
rosrun kinect2_bridge kinect2_bridge _depth_method:=<opengl|opencl|cpu> _reg_method:=<cpu|opencl>新开终端:
rosrun kinect2_viewer kinect2_viewer
本文是项目iai_kinect2和libfreenect2的帮助文档的简化版。
更多内容可参考两个项目的github
出现的问题:
1. rosdep install出现如下问题
可忽略这些这些错误,继续下一步。

2. catkin_make -DCMAKE_BUILD_TYPE="Release" 出现cannot find -lvtkproj4错误
解决方法,先执行
sudo apt-get install libproj-dev
上述方法无效,需要
在cmakelist中加一条指令修复,即在add_executable语句前面加上list(REMOVE_ITEM PCL_LIBRARIES "vtkproj4")
3.rosrun kinect2_viewer kinect2_viewer出现Packet buffer is NULL的问题
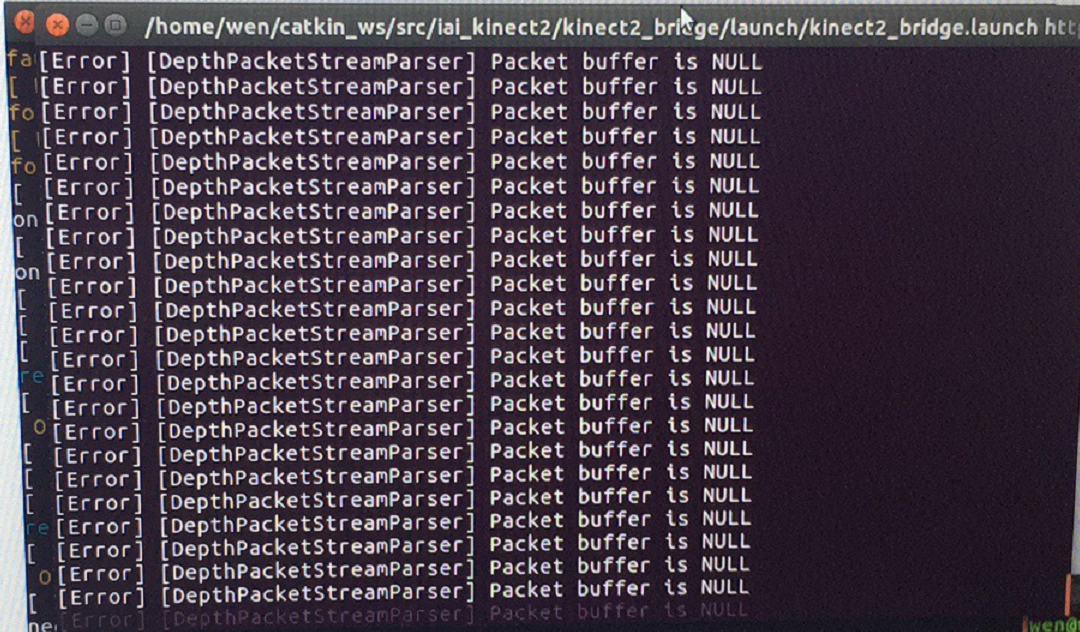
应该是opencl的问题,运行
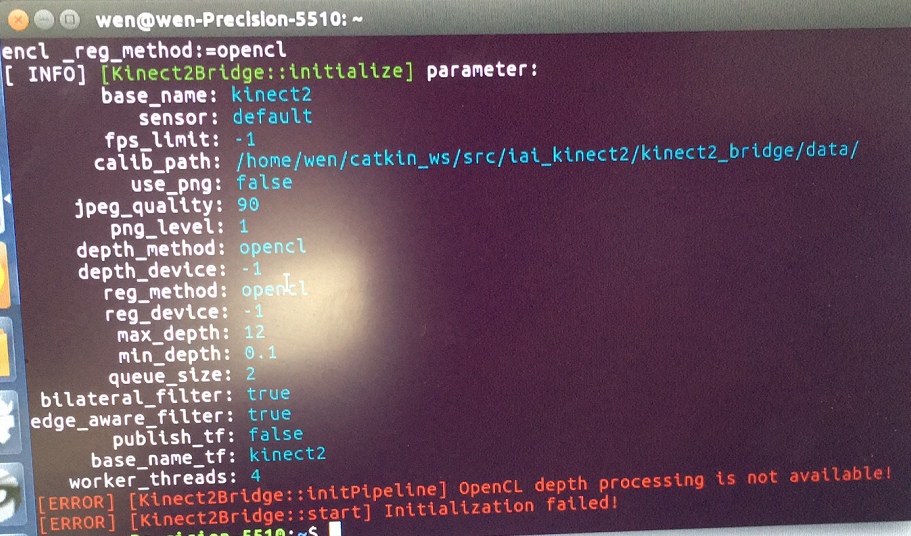
rosrun kinect2_bridge kinect2_bridge _depth_method:=opengl _reg_method:=opencl
会出现如下问题,
opencl没有装好
或者
检查当前显卡切换到了独显(在intel核显下试了好久,后来切到了nvidia,终于好了)
1)opencl安装,确保之前装好了显卡驱动
对于nvidia和AMD显卡,运行
sudo apt-get
install nvidia-modprobe
opencl-headers
ocl-icd-dev
intel显卡
sudo apt-add-repository ppa:floe/beignet; sudo apt-get update; sudo apt-get install beignet-dev; sudo dpkg -i debs/ocl-icd*deb
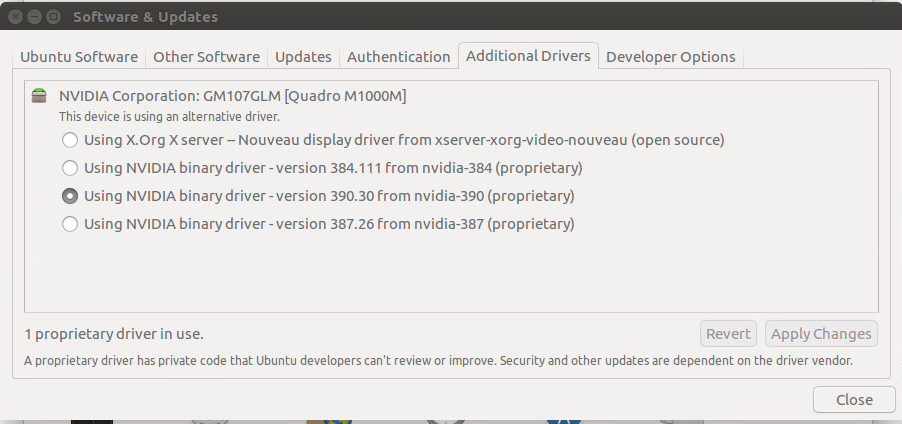
2)显卡切换(对于双显卡的电脑)
a. 检查已有的显卡
lspci -k | grep -A 2 -i "VGA"
对于没有安装好的驱动,可能只显示一个
可找到/etc/X11/xorg.conf文件,查看Section "Screen"项目个数,在Device中显示的就是显卡的型号。
b. 当前显卡
系统设置 > 细节 窗口。你将会看见Ubuntu正在使用哪一块显卡。
c.安装Nvidia专有显卡驱动
运行 sudo ubuntu-drivers devices,查看推荐显卡驱动
安装驱动 sudo apt-get install nvidia-352
d.切换显卡
打开Nvidia X Server Settings (Nvidia X服务器设置)窗口。也可以在终端里输入下面的命令打开。
nvidia-settings,选择切换的显卡。

最后
以上就是鳗鱼绿茶最近收集整理的关于orbslam2 ROS下RGBD实验记录(二) kinect2安装配置的全部内容,更多相关orbslam2内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复