欢迎来到矽芯硬翌的科技主义教室!
害,如今已经十六届智能车啦也是我最后一次参赛了。第十五届充满了遗憾,如今也只能总结失败继续向前啦,接下来就在这里持续更新这次十六届智能车制作的实况吧,主要从硬件设计,程序设计,赛道元素,车模处理这几个方面出发,期待十六届的到来 加油UPUPUP!
@Author: 精神小????君!
????想要我的财宝吗?想要的话可以全部给你,去找出来吧,这世上所有的一切都在那里!????
ONE PIECE地址: ✨ 矽芯硬翌的博客✨

文章目录
- 欢迎来到矽芯硬翌的科技主义教室!
- 前言
- 一、总体介绍
- 二、电机介绍
- 三、硬件电路设计
- 3.1 电源部分
- 3.2 H桥硬件电路设计
- 3.3 PWM输入电路
- 三、总结
前言
第十五届时四轮组用的是C车模,我们电机驱动选择的是MOS管双电机驱动。由于这次换了B车模所以我在原有的基础上将MOS管双电机驱动改为单电机驱动。关于硬件的设计我想说的是要站在巨人的肩膀上,我也不是自己造电路的,大多数都是对比模仿他人的方案,这里我重点讲一下元器件的PCB与原理图的绘制方面的问题 。 那现在我们就开始吧! 以下是介绍电机驱动的各个组成部分,仅供参考。上一篇已经介绍过TC264主板的设计啦,有兴趣的多多支持哦
关于TC264主板设计的内容看这里:????智能车四轮组打工日记(一)—TC264主板硬件设计????
一、总体介绍
在电机驱动电路的选型上,有很多选择和选型。 相比较常用的 BTN7971,MOS 导通电阻小、 响应快, 为想要发挥 B 车的性能, 同时 B 车电机满转的电流很大,为了达到软件控制的要求,我们最后经过比较,最终选择了来自英飞凌经典的驱动组合 IR2104 和 IRLR7843,搭建两个 H 桥驱动电路来驱动电机。
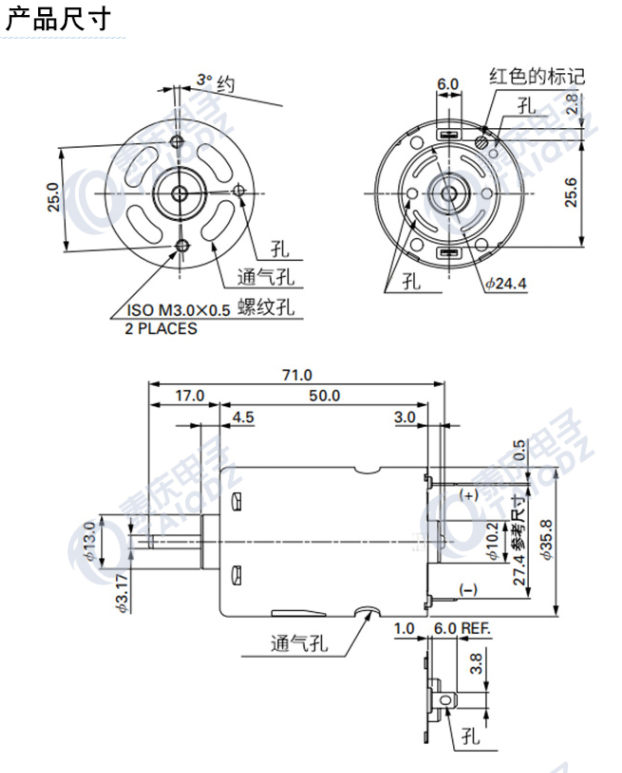
二、电机介绍
第十六届的新B车模采用的是RS-540伺服电机,其实物图如下。
RS-540电机实物图:

直流伺服电机具有优良的速度控制性能,它输出较大的转矩,直接拖动负载运行,同时它又受控制信号的直接控制进行转速调节。在很多方面有优越性,具体来说,它具有以下优点:
- 具有较大的转矩,以克服传动装置的摩擦转矩和负载转矩。
- 调速范围宽,高精度,机械特性及调节特性线性好,且运行速度平稳。
- 具有快速响应能力,可以适应复杂的速度变化。
- 电机的负载特性硬,有较大的过载能力,确保运行速度不受负载冲击的影响。
- 可以长时间地处于停转状态而不会烧毁电机,一般电机不能长时间运行于停转状态,电机长时间停转时,稳定温升不超过允许值时输出的最大堵转转矩称为连续堵转转矩,相应的电枢电流为连续堵转电流。
RS-540电机具体参数:

三、硬件电路设计
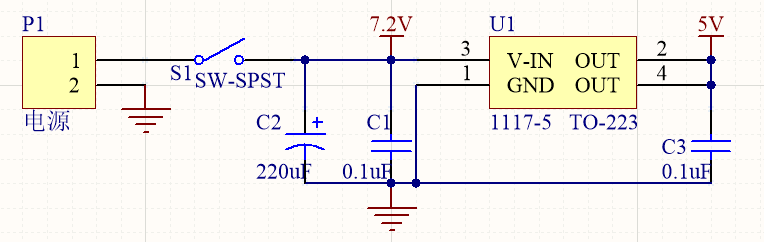
3.1 电源部分
电源部分采用的是1117-5。AMS1117是一个低漏失电压调整器,它的稳压调整管是由一个PNP驱动的NPN管组成的,漏失电压定义为:VDROP=VBE+VSAT。AMS1117有固定和可调两个版本可用,输出电压可以是:1.2V,1.5V,1.8V,2.5V,2.85V,3.0V,3.3V,和5.0V。片内过热切断电路提供了过载和过热保护,以防环境温度造成过高的结温。
为了确保AMS1117的稳定性,对可调电压版本,输出需要连接一个至少22μF的钽电容。对于固定电压版本,可采用更小的电容,具体可以根据实际应用确定。通常,线性调整器的稳定性随着输出电流增加而降低。
AM1117-5的电路图部分:
升压电路采用的是MC34603,MC34063是一单片双极型线性集成电路,专用于直流-直流变换器控制部分。片内包含有温度补偿带隙基准源、一个占空比周期控制振荡器、驱动器和大电流输出开关,能输出1.5A的开关电流。它能使用最少的外接元件构成开关式升压变换器、降压式变换器和电源反向器
MC34063升压电路:从5V升到12V:
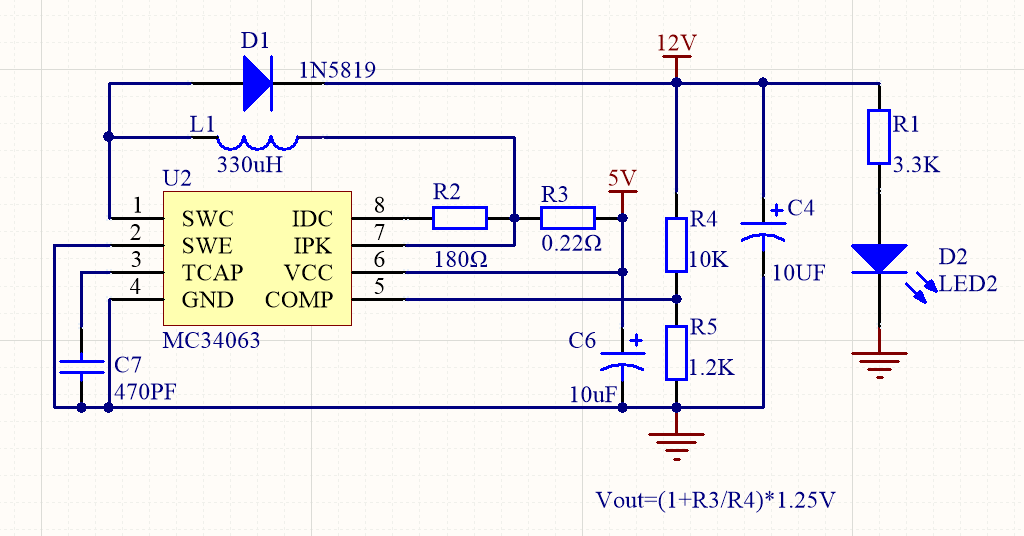
电源部分小结:通过AMS1117-5模块将电池的电压稳定在5V,并输送给MC34063用于升压。MC34063输出的12V电压用于提供给后面的H桥电路。
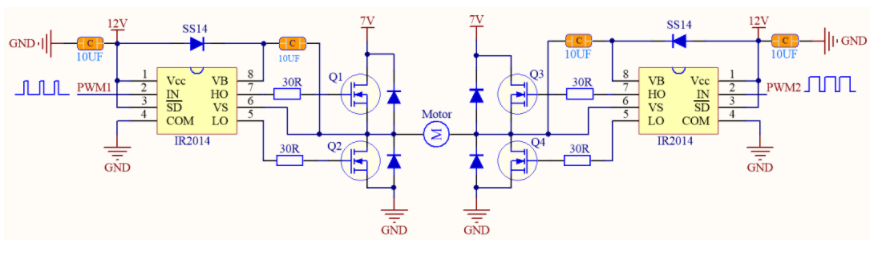
3.2 H桥硬件电路设计
关于H桥电路的设计主要用到了IR2104半桥驱动芯片和IR7843MOS管。
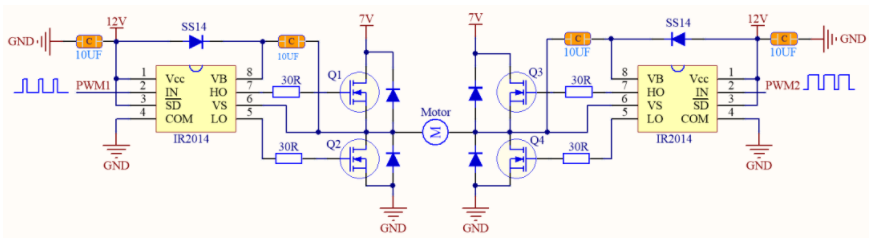
H桥电路整体原理图如下:
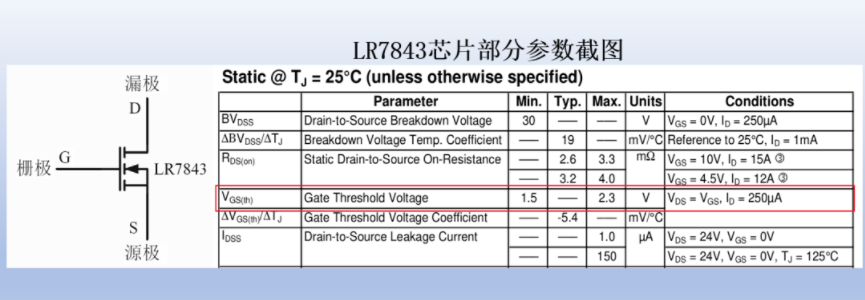
1. IR7843MOS管
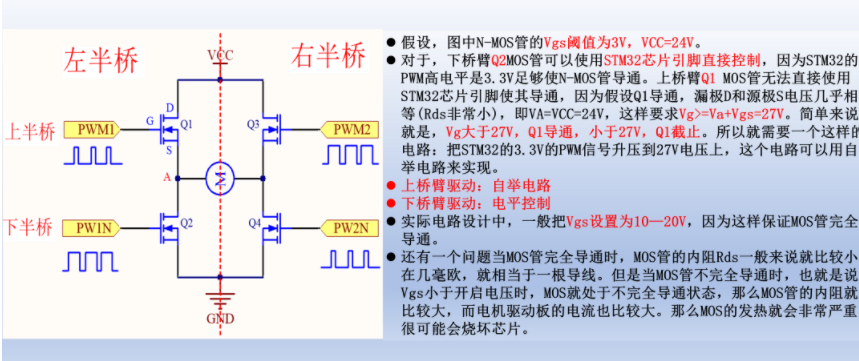
在H桥中一般使用4个N型MOS管来搭建。对于NMOS,当外部给的栅源极Vgs电压大于芯片的Vgs阈值(大部分在2V-10V之间)时,漏极D和源极S之间直接导通。如果外部给的Vgs电压小于阈值,漏极D和源极S之间截止。
所以简单的来说,NMOS管就是一个由栅极G电压控制的一个开关。就是通过Vgs来控制NMOS管的通断。
NMOS管的原理图如下:
2.IR2104半桥驱动芯片
所谓半桥驱动芯片,便是一块驱动芯片只能用于控制H桥一侧的2个MOS管。因此采用半桥驱动芯片时,需要两块该芯片才能控制一个完整的H桥。
相应的,全桥驱动芯片便是可以直接控制4个MOS管的导通与截止,一块该芯片便能完成一个完整H桥的控制。
这里使用的IR2104便是一款半桥驱动芯片,因此在原理图中可以看到每个H桥需要使用两块此芯片。
IR2104经典电路设计如下:
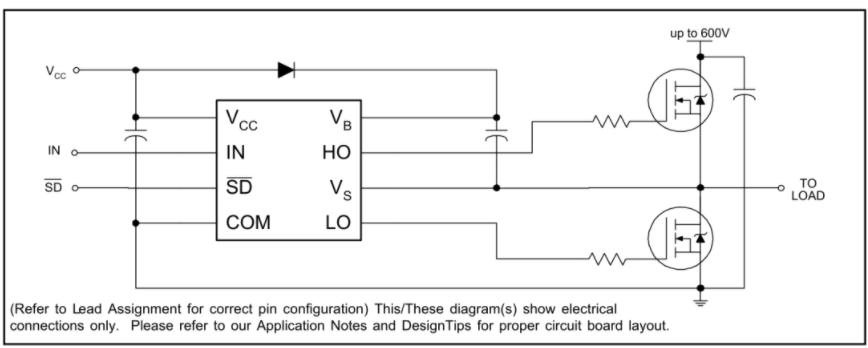
IR2104的各个引脚功能:
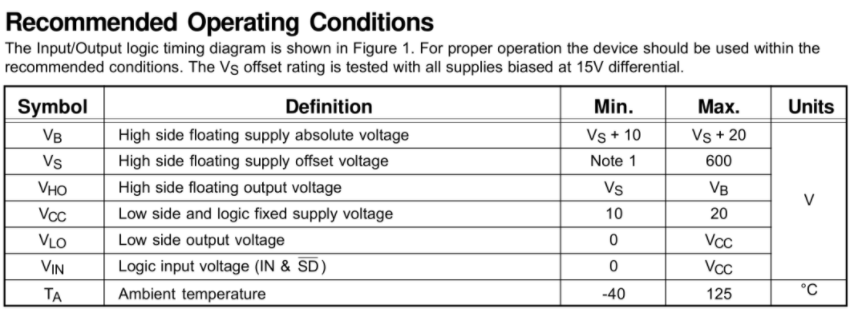
- VCC为芯片的电源输入,手册中给出的工作电压为10~20V。
- IN和SD作为输入控制,可共同控制电机的转动状态(转向、转速和是否转动)。
- VB和VS主要用于形成自举电路。
- HO和LO接到MOS管栅极,分别用于控制上桥臂和下桥臂MOS的导通与截止。
- COM脚直接接地即可。
3.总体说明
对驱动一个电机的H桥电路来说,上半桥由自举电路来控制,下半桥由单片机的引脚来控制。
(关于自举电路大家可以查看这篇文章????H桥驱动电路详解????)
关于上半桥/下半桥/左右半桥的解释:
通过IR2104来控制MOS管的通断最终实现电机的正转与反转。
工作方式简述:
① Q1Q2导通/Q3Q4截止
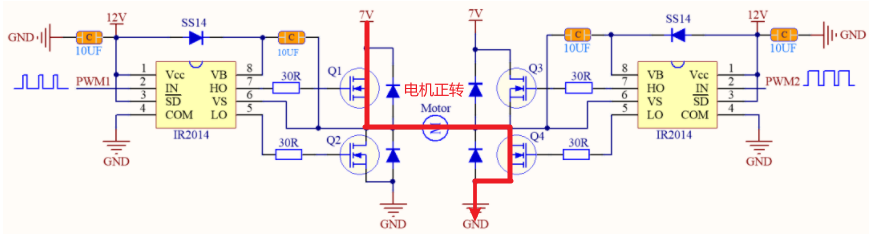
② Q3Q4导通/Q1Q2截止
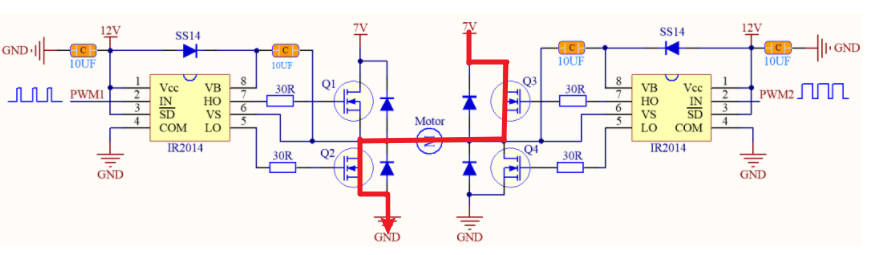
注意:电机的正反转取决于电机的接线,这里正转与反转只起说明作用
3.3 PWM输入电路
通过单片机的IO口可以输出PWM波,当输入到驱动板是可以加上74LS244芯片起到隔离加驱的作用。
74LS244为3态8位缓冲器,一般用作总线驱动器。74LS244没有锁存的功能。地址锁存器就是一个暂存器,它根据控制信号的状态,将总线上地址代码暂存起来。8086/8088数据和地址总线采用分时复用操作方法,即用同一总线既传输数据又传输地址。
具体电路如下图:
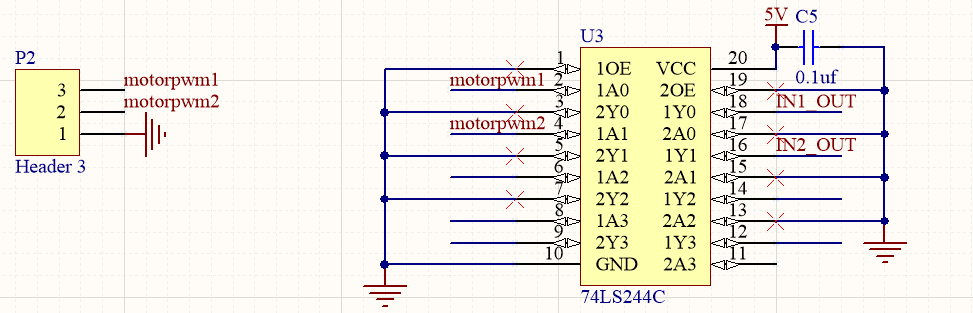
数据引脚
8个数据输入端,1A1、1A2、1A3、1A4,2A1、2A2、2A3、2A4,(其中1A4和2A4是高位)。
8个二进制输出端1Y1、1Y2、1Y3、1Y4、2Y1、2Y2、2Y3、2Y4,以四位二进制形式输出。
功能表简介:

三、总结
电机驱动的原理大致介绍完啦,从双驱动变为单驱动之后原理图结构更为简单,关键的地方在于PCB的布线。等原理图部分更新完了就去PCB与元器件的选型介绍啦嘻嘻!
佛祖保佑,下期运放原理图见!
/*
* _oo0oo_
* o8888888o
* 88" . "88
* (| -_- |)
* 0 = /0
* ___/`---'___
* .' \| |// '.
* / \||| : |||//
* / _||||| -:- |||||-
* | | \ - /// | |
* | _| ''---/'' |_/ |
* .-__ '-' ___/-. /
* ___'. .' /--.-- `. .'___
* ."" '< `.____<|>_/___.' >' "".
* | | : `- `.;` _ /`;.`/ - ` : | |
* `_. _ __ /__ _/ .-` / /
* =====`-.____`.___ _____/___.-`___.-'=====
* `=---='
*
*
* ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
*
* 佛祖保佑 永不宕机 永无BUG
*
* 佛曰:
* 写字楼里写字间,写字间里程序员;
* 程序人员写程序,又拿程序换酒钱。
* 酒醒只在网上坐,酒醉还来网下眠;
* 酒醉酒醒日复日,网上网下年复年。
* 但愿老死电脑间,不愿鞠躬老板前;
* 奔驰宝马贵者趣,公交自行程序员。
* 别人笑我忒疯癫,我笑自己命太贱;
* 不见满街漂亮妹,哪个归得程序员?
*/
最后
以上就是魁梧马里奥最近收集整理的关于智能车四轮组打工日记(二)——单电机驱动硬件设计前言一、总体介绍二、电机介绍三、硬件电路设计三、总结的全部内容,更多相关智能车四轮组打工日记(二)——单电机驱动硬件设计前言一、总体介绍二、电机介绍三、硬件电路设计三、总结内容请搜索靠谱客的其他文章。








发表评论 取消回复