Canny算法检测边缘步骤:
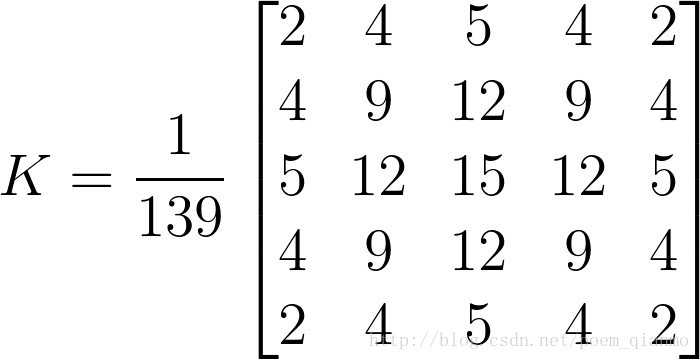
1.消除噪声。 一般情况下,使用高斯平滑滤波器卷积降噪。 如下显示了一个 size = 5 的高斯内核示例:
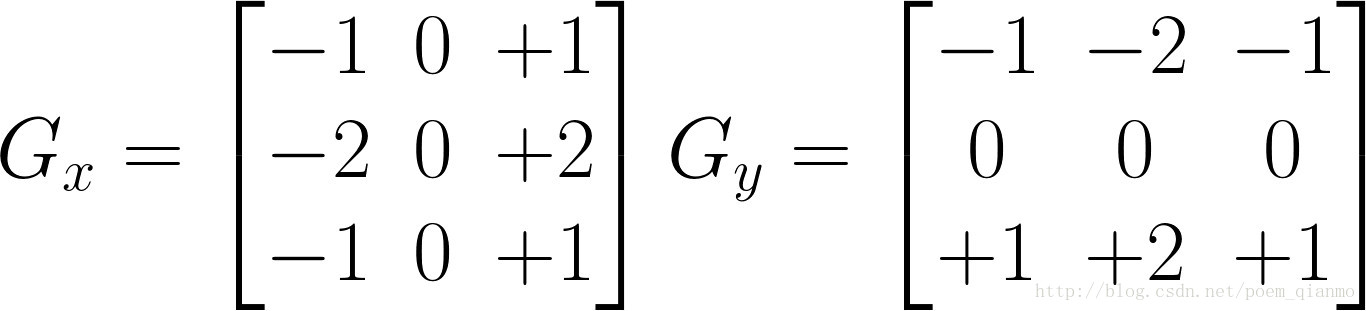
2.计算梯度幅值和方向。 此处,按照Sobel滤波器的步骤。
Ⅰ.运用一对卷积阵列 (分别作用于 x 和 y 方向):
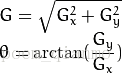
Ⅱ.使用下列公式计算梯度幅值和方向:
梯度方向近似到四个可能角度之一(一般为0, 45, 90, 135)
3.非极大值抑制。 这一步排除非边缘像素, 仅仅保留了一些细线条(候选边缘)。
4.滞后阈值。最后一步,Canny 使用了滞后阈值,滞后阈值需要两个阈值(高阈值和低阈值):
Ⅰ.如果某一像素位置的幅值超过 高 阈值, 该像素被保留为边缘像素。
Ⅱ.如果某一像素位置的幅值小于 低 阈值, 该像素被排除。
Ⅲ.如果某一像素位置的幅值在两个阈值之间,该像素仅仅在连接到一个高于 高 阈值的像素时被保留。
tips:对于Canny函数的使用,推荐的高低阈值比在2:1到3:1之间。
Canny函数:
C++: void Canny(InputArray image,OutputArray edges, double threshold1, double threshold2, int apertureSize=3,bool L2gradient=false )
- 第三个参数,double类型的threshold1,第一个滞后性阈值。
- 第四个参数,double类型的threshold2,第二个滞后性阈值。
- 第五个参数,int类型的apertureSize,表示应用Sobel算子的孔径大小,其有默认值3
代码:
#include<opencv2/opencv.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<iostream>
using namespace std;
using namespace cv;
int main()
{
Mat img;
img=imread("C://Users//huashuo111//Desktop//橘子.jpg");
namedWindow("原图",1);
imshow("原图",img);
Mat img1;//直接利用Canny算子
Canny(img,img1,3,9,3);
imshow("边缘",img1);
Mat img2,gray,dst;
dst.create(img.size(),img.type());
dst=Scalar::all(0);
img2=img.clone();
cvtColor(img2,gray,CV_BGR2GRAY);//灰度图
blur(gray,gray,Size(3,3));//均值模糊
Canny(gray,gray,3,9,3);//Canny检测
img2.copyTo(dst,gray);//Canny检测后边缘图做掩码,加到原图上,呈现彩色边缘
imshow("边缘1",dst);
imwrite("C://Users//huashuo111//Desktop//边缘.jpg",img1);
imwrite("C://Users//huashuo111//Desktop//边缘1.jpg",dst);
waitKey();
return 0;
}
原图:

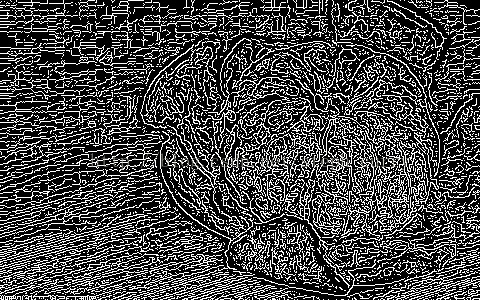
直接Canny检测:
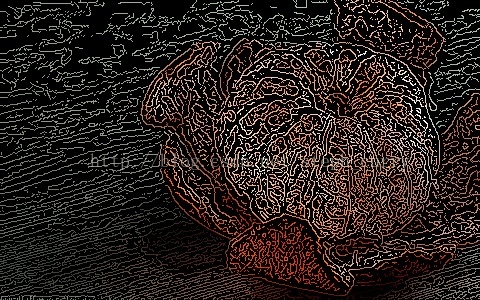
图像增强后检测:
最后
以上就是可爱大侠最近收集整理的关于OpenCV边缘检测:Canny算子,Sobel算子,Laplace算子,Scharr滤波器的全部内容,更多相关OpenCV边缘检测:Canny算子内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复