STM32的定时器是个强大的模块,定时器使用的频率也是很高的,定时器可以做一些基本的定时,还可以做PWM输出或者输入捕获功能。
时钟源问题:
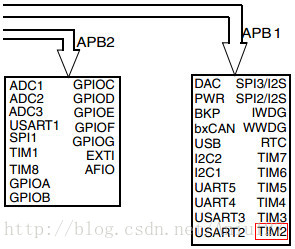
名为TIMx的有八个,其中TIM1和TIM8挂在APB2总线上,而TIM2-TIM7则挂在
APB1总线上。其中TIM1&TIM8称为高级控制定时器(advanced control timer).他们所在的APB2总线也比APB1总线要好。APB2可以工作在72MHz下,而APB1最大是36MHz。
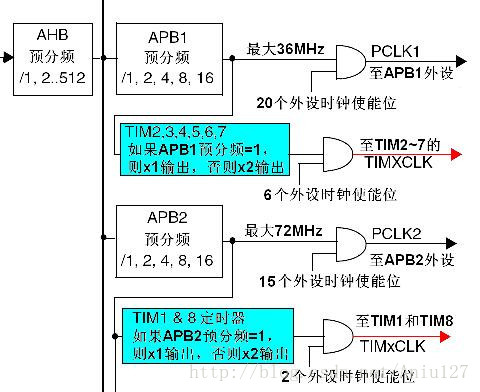
定时器的时钟不是直接来自APB1或APB2,而是来自于输入为APB1或APB2的一个倍频器。
下面以定时器2~7的时钟说明这个倍频器的作用:当APB1的预分频系数为1时,这个倍频器不起作用,定时器的时钟频率等于APB1的频率;当APB1的预分频系数为其它数值(即预分频系数为2、4、8或16)时,这个倍频器起作用,定时器的时钟频率等于APB1的频率两倍。
假定AHB=36MHz,因为APB1允许的最大频率为36MHz,所以APB1的预分频系数可以取任意数值;当预分频系数=1时,APB1=36MHz,TIM2~7的时钟频率=36MHz(倍频器不起作用);当预分频系数=2时,APB1=18MHz,在倍频器的作用下,TIM2~7的时钟频率=36MHz。
有人会问,既然需要TIM2~7的时钟频率=36MHz,为什么不直接取APB1的预分频系数=1?答案是:APB1不但要为TIM2~7提供时钟,而且还要为其它外设提供时钟;设置这个倍频器可以在保证其它外设使用较低时钟频率时,TIM2~7仍能得到较高的时钟频率。
再举个例子:当AHB=72MHz时,APB1的预分频系数必须大于2,因为APB1的最大频率只能为36MHz。如果APB1的预分频系数=2,则因为这个倍频器,TIM2~7仍然能够得到72MHz的时钟频率。能够使用更高的时钟频率,无疑提高了定时器的分辨率,这也正是设计这个倍频器的初衷。
TIM通用定时器配置步骤:
1.配置TIM时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
2.定时器基本配置
void TIM2_Configuration(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
// TIM_OCInitTypeDef TIM_OCInitStructure ;
TIM_DeInit(TIM2); //复位TIM2定时器
/* TIM2 configuration */
TIM_TimeBaseStructure.TIM_Period = 5; // 2.5ms
TIM_TimeBaseStructure.TIM_Prescaler = 36000; // 分频36000
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 时钟分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数方向向上计数
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
/* Clear TIM2 update pending flag[清除TIM2溢出中断标志] */
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
/* Enable TIM2 Update interrupt [TIM2溢出中断允许]*/
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
/* TIM2 enable counter [允许tim2计数]*/
TIM_Cmd(TIM2, ENABLE);
}
TIM_Period设置了在下一个更新事件装入活动的自动重装载寄存器周期的值。它的取值必须在0x0000和0xFFFF之间。
TIM_Prescaler设置了用来作为TIMx时钟频率除数的预分频值。它的取值必须在0x0000和0xFFFF之间。
TIM_ClockDivision的作用是做一段延时,一般在特殊场合的时候会用到,可不关心。
TIM_CounterMode选择了计数器模式。
TIM_CounterMode_Up
TIM向上计数模式
TIM_CounterMode_Down
TIM向下计数模式
TIM_CounterMode_CenterAligned1 TIM中央对齐模式1计数模式
TIM_CounterMode_CenterAligned2 TIM中央对齐模式2计数模式
TIM_CounterMode_CenterAligned3 TIM中央对齐模式3计数模式
单片机时钟频率72MHz,APB1 二分频36MHz,故TIM2自动2倍频至72MHz,故定时器中断频率为72000000/36000/5=400Hz
3.使能定时器中断TIM_Cmd(TIM2, ENABLE);
4.配置NVIC。
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQChannel;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 4;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
5.写中断函数
void TIM2_IRQHandler(void)
{
......//中断处理
}
stm32_timer基本定时器配置及实现灯闪烁
STM32中一共有11个定时器,其中2个高级控制定时器,4个普通定时器和2个基本定时器,以及2个看门狗定时器和1个系统嘀嗒定时器。
TIM1和TIM8是能够产生3对PWM互补输出的高级登时其,常用于三相电机的驱动,时钟由APB2的输出产生;TIM2-TIM5是普通定时器;TIM6和TIM7是基本定时器,其时钟由APB1输出产生;
本实验要实现的功能是:用普通定时器TIM2每一秒发生一次更新事件,进入中断服务程序翻转LED1的状态。
预备知识:
① STM32通用定时器TIM2是16位自动重装载计数器。
② 向上计数模式:从0开始计数,计到自动装载寄存器(TIMx_ARR)中的数值时,清0,依次循环。
需要弄清楚的两个问题:
1. 计数器的计数频率是什么?
这个问题涉及到RCC时钟部分,如下图所示:
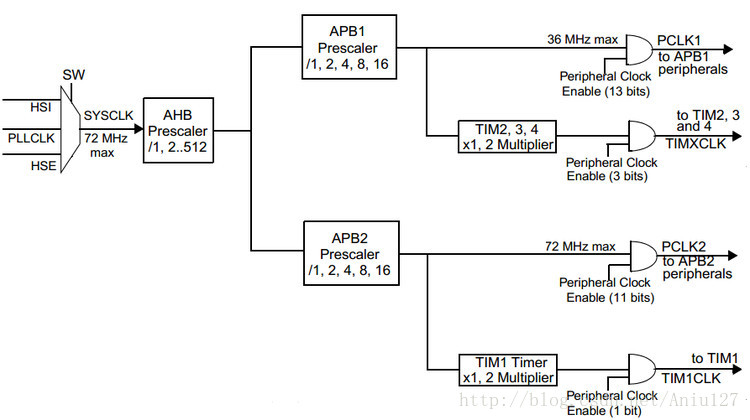
定时器的时钟不是直接来自APB1或APB2,而是来自于输入为APB1或APB2的一个倍频器。
下面以定时器2~7的时钟说明这个倍频器的作用:当APB1的预分频系数为1时,这个倍频器不起作用,定时器的时钟频率等于APB1的频率;当APB1的预分频系数为其它数值(即预分频系数为2、4、8或16)时,这个倍频器起作用,定时器的时钟频率等于APB1的频率两倍。
假定AHB=36MHz,因为APB1允许的最大频率为36MHz,所以APB1的预分频系数可以取任意数值;当预分频系数=1时,APB1=36MHz,TIM2~7的时钟频率=36MHz(倍频器不起作用);当预分频系数=2时,APB1=18MHz,在倍频器的作用下,TIM2~7的时钟频率=36MHz。
有人会问,既然需要TIM2~7的时钟频率=36MHz,为什么不直接取APB1的预分频系数=1?答案是:APB1不但要为TIM2~7提供时钟,而且还要为其它外设提供时钟;设置这个倍频器可以在保证其它外设使用较低时钟频率时,TIM2~7仍能得到较高的时钟频率。
再举个例子:当AHB=72MHz时,APB1的预分频系数必须大于2,因为APB1的最大频率只能为36MHz。如果APB1的预分频系数=2,则因为这个倍频器,TIM2~7仍然能够得到72MHz的时钟频率。能够使用更高的时钟频率,无疑提高了定时器的分辨率,这也正是设计这个倍频器的初衷。
注意:APB1和APB2上挂的外设如图所示:
定时器的计数频率有个公式:
TIMx_CLK = CK_INT / (TIM_Prescaler + 1)
其中:TIMx_CLK 定时器的计数频率
CK_INT 内部时钟源频率(APB1的倍频器送出时钟)
TIM_Prescaler 用户设定的预分频系数,取值范围0~65535。
例如:RCC中AHB=72MHZ、APB1=36MHZ、APB2=72MHZ,则CK_INT=72MKZ。
2. 如何计算定时时间?
上述公式中TIM_Prescaler涉及到寄存器TIMx_PSC

如果TIM_Prescaler设为36000,由上面公式可知:
定时器的计数频率 TIMx_CLK = 72MKZ / 36000 = 2000HZ,则定时器的计数周期=1/2000HZ=0.5ms.
如果要定时1秒,则需要计数2000次,这也是自动重装载的值。又涉及到TIMx_ARR

只要上述两个问题搞清楚了,剩下的就是设置相应寄存器的对应位了。
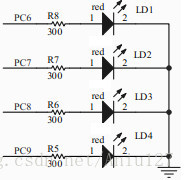
LED硬件连接如下图所示:高电平点亮LED。
第一步:配置系统时钟。见STM32F103x RCC寄存器配置
除此之外,还需将GPIO和TIM2外设时钟打开。
/* Enable GPIOC clock */ RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE); /* Enable TIM2 clock */ RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
注意:TIM2是挂在APB1上的,打开时钟时别写错了,调用RCC_APB1PeriphClockCmd函数,而不是RCC_APB2PeriphClockCmd。
第二步:配置中断向量表。见stm32_exti(含NVIC)配置及库函数讲解
void NVIC_Configuration(void) { NVIC_InitTypeDef NVIC_InitStructure; #ifdef VECT_TAB_RAM /* Set the Vector Table base location at 0x20000000 */ NVIC_SetVectorTable(NVIC_VectTab_RAM, 0x0); #else /* VECT_TAB_FLASH */ /* Set the Vector Table base location at 0x08000000 */ NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0); #endif /* Configure one bit for preemption priority */ NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1); /* Enable the TIM2 Interrupt */ NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQChannel; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 4; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); }
该函数完成两个功能
1. 决定将程序下载到RAM中还是FLASH中
2. 配置中断分组。(NVIC中断分组只能设置一次)
3. 选择中断通道号,抢占式优先级和响应优先级,使能中断
第三步:配置GPIO的模式。输入模式还是输出模式。点亮LED已讲过,见STM32_GPIO配置及库函数讲解——LED跑马灯
void GPIO_Configuration(void) { GPIO_InitTypeDef GPIO_InitStructure; /* Configure PC.06 as Output push-pull */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_Init(GPIOC, &GPIO_InitStructure); }
第四步:定时器配置,本章重点!
void TIM2_Configuration(void) { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //重新将Timer设置为缺省值 TIM_DeInit(TIM2); //采用内部时钟给TIM2提供时钟源 TIM_InternalClockConfig(TIM2); //预分频系数为36000-1,这样计数器时钟为72MHz/36000 = 2kHz TIM_TimeBaseStructure.TIM_Prescaler = 36000 - 1; //设置时钟分割 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置计数器模式为向上计数模式 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //设置计数溢出大小,每计2000个数就产生一个更新事件 TIM_TimeBaseStructure.TIM_Period = 2000; //将配置应用到TIM2中 TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //清除溢出中断标志 TIM_ClearFlag(TIM2, TIM_FLAG_Update); //禁止ARR预装载缓冲器 TIM_ARRPreloadConfig(TIM2, DISABLE); //预装载寄存器的内容被立即传送到影子寄存器 //开启TIM2的中断 TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); }
该函数完成两个功能
1. 设定预分频系数TIM_Prescaler = 36000 - 1
2. 设定自动重装载值TIM_Period = 2000
注意:上述只是配置好了TIM2,但还没有开启TIM2。
下面给出timer2.c的完整代码
/* Includes ------------------------------------------------------------------*/ #include "stm32f10x_lib.h" /* Private function prototypes -----------------------------------------------*/ void RCC_Configuration(void); void NVIC_Configuration(void); void GPIO_Configuration(void); void TIM2_Configuration(void); void Delay(vu32 nCount); /******************************************************************************* * Function Name : main * Description : Main program. * Input : None * Return : None *******************************************************************************/ int main(void) { #ifdef DEBUG debug(); #endif /* Configure the system clocks */ RCC_Configuration(); /* NVIC Configuration */ NVIC_Configuration(); /* Configure the GPIO ports */ GPIO_Configuration(); /* Configure the TIM2 */ TIM2_Configuration(); TIM_Cmd(TIM2, ENABLE); //开启定时器2 /* Infinite loop */ while (1) { } } /******************************************************************************* * Function Name : RCC_Configuration * Description : Configures the different system clocks. * Input : None * Return : None *******************************************************************************/ void RCC_Configuration(void) { ErrorStatus HSEStartUpStatus; /* RCC system reset(for debug purpose) */ RCC_DeInit(); /* Enable HSE */ RCC_HSEConfig(RCC_HSE_ON); /* Wait till HSE is ready */ HSEStartUpStatus = RCC_WaitForHSEStartUp(); if (HSEStartUpStatus == SUCCESS) { /* Enable Prefetch Buffer */ FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable); /* Flash 2 wait state */ FLASH_SetLatency(FLASH_Latency_2); /* HCLK = SYSCLK */ RCC_HCLKConfig(RCC_SYSCLK_Div1); /* PCLK2 = HCLK */ RCC_PCLK2Config(RCC_HCLK_Div1); /* PCLK1 = HCLK/2 */ RCC_PCLK1Config(RCC_HCLK_Div2); /* PLLCLK = 8MHz * 9 = 72 MHz */ RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9); /* Enable PLL */ RCC_PLLCmd(ENABLE); /* Wait till PLL is ready */ while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET) {} /* Select PLL as system clock source */ RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK); /* Wait till PLL is used as system clock source */ while(RCC_GetSYSCLKSource() != 0x08) {} } /* Enable GPIOC clock */ RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE); /* Enable TIM2 clock */ RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); } /******************************************************************************* * Function Name : NVIC_Configuration * Description : Configures Vector Table base location. * Input : None * Return : None *******************************************************************************/ void NVIC_Configuration(void) { NVIC_InitTypeDef NVIC_InitStructure; #ifdef VECT_TAB_RAM /* Set the Vector Table base location at 0x20000000 */ NVIC_SetVectorTable(NVIC_VectTab_RAM, 0x0); #else /* VECT_TAB_FLASH */ /* Set the Vector Table base location at 0x08000000 */ NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0); #endif /* Configure one bit for preemption priority */ NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1); /* Enable the EXTI9_5 Interrupt */ NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQChannel; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 4; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); } /******************************************************************************* * Function Name : GPIO_Configuration * Description : Configures the different GPIO ports. * Input : None * Return : None *******************************************************************************/ void GPIO_Configuration(void) { GPIO_InitTypeDef GPIO_InitStructure; /* Configure PC.06 as Output push-pull */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_Init(GPIOC, &GPIO_InitStructure); } /******************************************************************************* * Function Name : TIM2_Configuration * Description : 每1秒发生一次更新事件(进入中断服务程序). * Input : None * Return : None *******************************************************************************/ void TIM2_Configuration(void) { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //重新将Timer设置为缺省值 TIM_DeInit(TIM2); //采用内部时钟给TIM2提供时钟源 TIM_InternalClockConfig(TIM2); //预分频系数为36000-1,这样计数器时钟为72MHz/36000 = 2kHz TIM_TimeBaseStructure.TIM_Prescaler = 36000 - 1; //设置时钟分割 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置计数器模式为向上计数模式 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //设置计数溢出大小,每计2000个数就产生一个更新事件 TIM_TimeBaseStructure.TIM_Period = 2000; //将配置应用到TIM2中 TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //清除溢出中断标志 TIM_ClearFlag(TIM2, TIM_FLAG_Update); //禁止ARR预装载缓冲器 TIM_ARRPreloadConfig(TIM2, DISABLE); //预装载寄存器的内容被立即传送到影子寄存器 //开启TIM2的中断 TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); } /******************************************************************************* * Function Name : Delay * Description : Inserts a delay time. * Input : nCount: specifies the delay time length. * Return : None *******************************************************************************/ void Delay(vu32 nCount) { for(; nCount != 0; nCount--); } #ifdef DEBUG /******************************************************************************* * Function Name : assert_failed * Description : Reports the name of the source file and the source line number * where the assert_param error has occurred. * Input : - file: pointer to the source file name * - line: assert_param error line source number * Return : None *******************************************************************************/ void assert_failed(u8* file, u32 line) { /* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %drn", file, line) */ /* Infinite loop */ while (1) { } } #endif
stm32f10x_it.c有关TIM2_IRQHandler代码如下
void TIM2_IRQHandler(void) { if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) { TIM_ClearITPendingBit(TIM2,TIM_IT_Update); GPIO_WriteBit(GPIOC, GPIO_Pin_6, (BitAction)((1 - GPIO_ReadOutputDataBit(GPIOC, GPIO_Pin_6)))); } }
最后
以上就是失眠唇膏最近收集整理的关于stm32通用定时器配置的全部内容,更多相关stm32通用定时器配置内容请搜索靠谱客的其他文章。








发表评论 取消回复