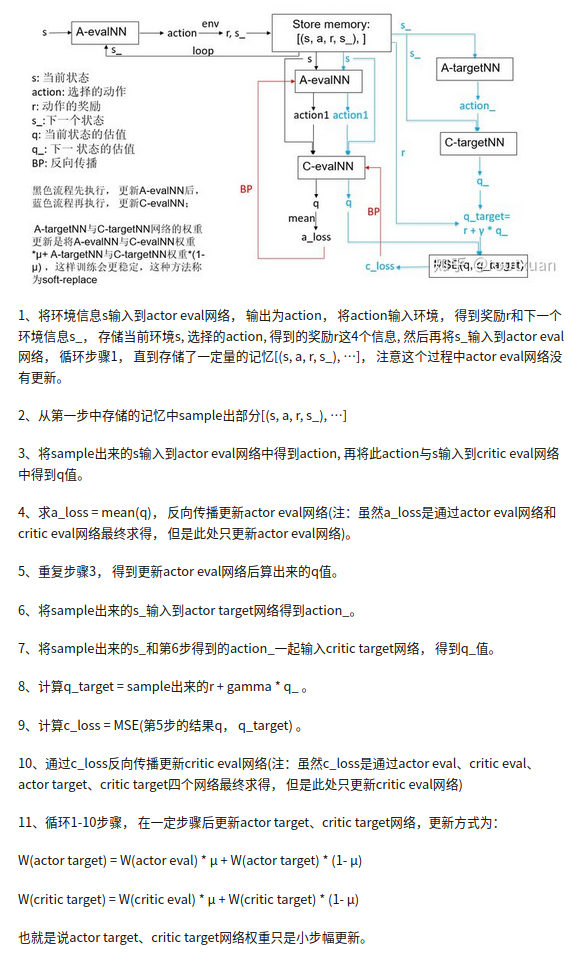
流程图参考
强化学习–从DQN到PPO, 流程详解
代码实现
参考DDPG实现
import gym
import torch
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
import argparse
import random
from collections import deque
import matplotlib.pyplot as plt
# ==================================================Net==================================================================
class ActorNet(nn.Module):
def __init__(self, n_states, n_actions, bound, emb_dim):
super(ActorNet, self).__init__()
self.bound = bound
self.fc = nn.Linear(n_states, emb_dim)
self.out = nn.Linear(emb_dim, n_actions)
def forward(self, x):
x = F.relu(self.fc(x))
x = torch.tanh(self.out(x)) # tanh将值映射至[-1,1]
action = x * self.bound
return action
class CriticNet(nn.Module):
def __init__(self, n_states, n_actions, emb_dim):
super(CriticNet, self).__init__()
self.fcs = nn.Linear(n_states, emb_dim)
self.fca = nn.Linear(n_actions, emb_dim)
self.fcx = nn.Linear(emb_dim * 2, emb_dim)
self.out = nn.Linear(emb_dim, 1)
def forward(self, x, y): # 输入状态和动作
s = self.fcs(x)
a = self.fca(y)
x = torch.cat([s, a], 1) # 拼接状态和动作
x = F.relu(self.fcx(x))
action_value = self.out(x) # 计算Q(s,a)
return action_value
# ==================================================DDPG=================================================================
class DDPG(object):
def __init__(self, n_states, n_actions, bound, args):
self.emb_dim = args.emb_dim
self.batch_size = args.batch_size
self.gamma = args.gamma
self.memory = deque(maxlen=args.memory_size)
self.actor_eval = ActorNet(n_states, n_actions, bound, self.emb_dim)
self.actor_target = ActorNet(n_states, n_actions, bound, self.emb_dim)
self.critic_eval = CriticNet(n_states, n_actions, self.emb_dim)
self.critic_target = CriticNet(n_states, n_actions, self.emb_dim)
self.actor_optim = torch.optim.Adam(self.actor_eval.parameters(), lr=0.001)
self.critic_optim = torch.optim.Adam(self.critic_eval.parameters(), lr=0.002)
self.loss_func = nn.MSELoss()
self.init_para()
def init_para(self):
self.actor_target.load_state_dict(self.actor_eval.state_dict())
self.critic_target.load_state_dict(self.critic_eval.state_dict())
def choose_action(self, s):
s = torch.FloatTensor(s)
action = self.actor_eval(s)
return action.detach()
def store(self, s, a, r, s_):
self.memory.append((s, a, r, s_))
def update_target_model(self):
tmp_dict = {}
for name, param in self.actor_target.named_parameters():
tmp_dict[name] = (1-0.99) * self.actor_target.state_dict()[name] + 0.99 * self.actor_eval.state_dict()[name]
self.actor_target.load_state_dict(tmp_dict)
tmp_dict = {}
for name, param in self.critic_target.named_parameters():
tmp_dict[name] = (1 - 0.99) * self.critic_target.state_dict()[name] + 0.99 * self.critic_eval.state_dict()[name]
self.critic_target.load_state_dict(tmp_dict)
def learn(self):
batch_data = random.sample(self.memory, self.batch_size)
bs = torch.FloatTensor([d[0] for d in batch_data]) # torch.size([batch_size, n_states])
ba = torch.FloatTensor([d[1] for d in batch_data]) # torch.size([batch_size, n_actions])
br = torch.FloatTensor([d[2] for d in batch_data]) # [batch_size]
bs_ = torch.FloatTensor([d[3] for d in batch_data]) # torch.size([batch_size, n_states])
a = self.actor_eval(bs) # torch.size([batch,n_actions])
q = self.critic_eval(bs, a) # torch.size([batch_size, 1)]
loss = -torch.mean(q) # 因为actor输出的a是使Q值最大的a,所有q值应该尽可能大,由于reward是负值,所有这里loss添加负号
self.actor_optim.zero_grad()
loss.backward()
self.actor_optim.step()
a_ = self.actor_target(bs_) # torch.size([batch,n_actions])
q_ = self.critic_target(bs_, a_) # torch.size([batch_size, 1)]
q_target = br.reshape(-1, 1) + self.gamma * q_ # torch.size([batch_size, 1)]
q_v = self.critic_eval(bs, ba) # torch.size([batch_size, 1)]
td_error = self.loss_func(q_target, q_v)
self.critic_optim.zero_grad()
td_error.backward()
self.critic_optim.step()
# =================================================Main================================================================
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--batch_size', type=int, default=32)
parser.add_argument('--emb_dim', type=int, default=32)
parser.add_argument('--episodes', type=int, default=400)
parser.add_argument('--len_episode', type=int, default=200)
parser.add_argument('--memory_size', type=int, default=10000)
parser.add_argument('--gamma', type=float, default=0.95)
parser.add_argument('--var', type=float, default=3.0)
parser.add_argument('--var_decay', type=float, default=0.9995)
parser.add_argument('--seed', type=int, default=1)
args = parser.parse_args()
env = gym.make('Pendulum-v0')
env.seed(args.seed)
torch.manual_seed(args.seed)
np.random.seed(args.seed)
n_states = env.observation_space.shape[0]
n_actions = env.action_space.shape[0]
bound = env.action_space.high[0]
agent = DDPG(n_states, n_actions, bound, args)
var = args.var
all_ep_r = []
for episode in range(args.episodes):
ep_r = 0
s = env.reset()
for t in range(args.len_episode):
a = agent.choose_action(s)
a = np.clip(np.random.normal(a, var), -bound, bound) # 正态分布抽样
s_, r, done, _ = env.step(a)
agent.store(s, a, r, s_)
if len(agent.memory) >= args.memory_size:
var *= args.var_decay
agent.learn()
agent.update_target_model()
ep_r += r
s = s_
print('Episode {:03d} | Reward:{:.03f}'.format(episode, ep_r))
if episode == 0:
all_ep_r.append(ep_r)
else:
all_ep_r.append(all_ep_r[-1] * 0.9 + ep_r * 0.1) # 平滑
plt.plot(np.arange(len(all_ep_r)), all_ep_r)
plt.show()
最后
以上就是害怕野狼最近收集整理的关于强化学习-DDPG的全部内容,更多相关强化学习-DDPG内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复