⛄一、多智能体群集与避障算法研究简介
采用分散控制的策略, 将多智能体群体运动的总控制律分成三个子控制律, 即编队控制、避障控制、目标控制, 分别研究了多智能体运动中智能体之间位置和速度的协调、躲避障碍物和向目标点移动的控制, 如图1所示。
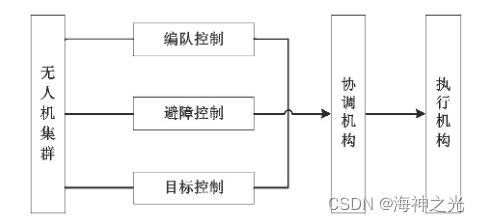
图1 智能体集群运动模型
1 多智能体群集运动基本模型
根据图1所示的多智能体运动模型, 假设第i个α-智能体的控制律为μi, 则
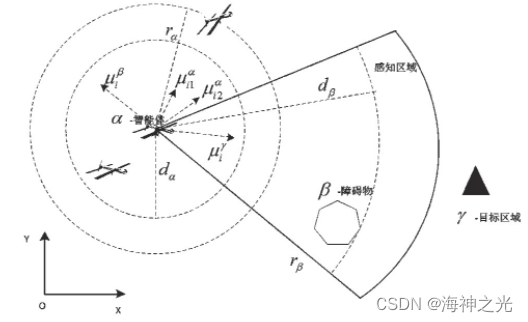
图2 第i个α-智能体的控制示意图
2 多智能体群集控制与共识算法研究
考虑由N个α-智能体组成的智能群体, 其动态方程为:
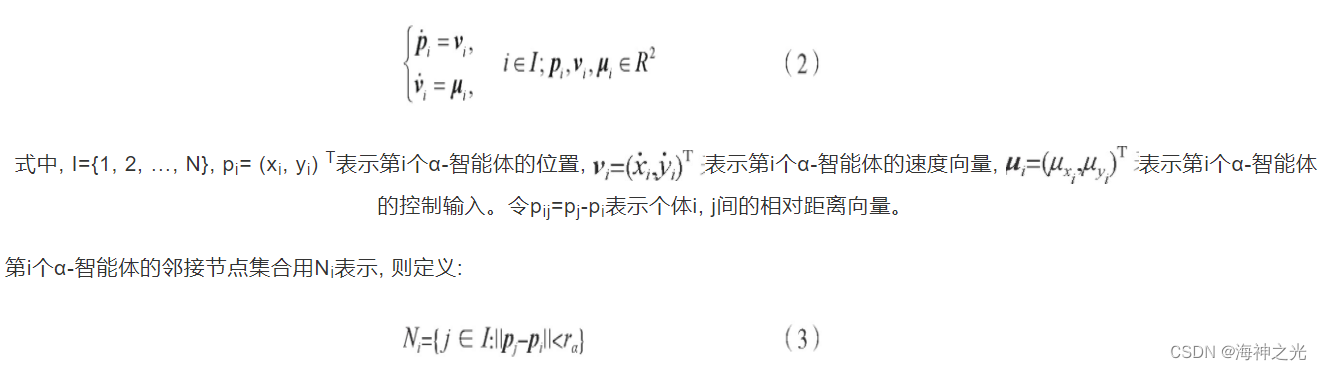
α-智能体的邻接矩阵用A=[aij]表示, 其中对于∀i∈I:j≠i, j∈Ni, aij>0;否则, aij=0。
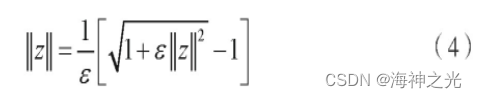
为了构建群集运动的一个光滑集成势场以及构建一个邻接网络的空间邻接矩阵, 定义一个叫做σ范式的非负地图。
并用冲击函数来构建光滑势场函数以及光滑邻接矩阵, 选择冲击函数如下:
最后
以上就是高兴蚂蚁最近收集整理的关于【控制仿真】flocking算法多智能蜂拥控制仿真【含Matlab源码 1955期】的全部内容,更多相关【控制仿真】flocking算法多智能蜂拥控制仿真【含Matlab源码内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复