【DataWhale打卡】第四次任务,主要是重新学习一下李宏毅的Q-learning部分的知识,推导很多。之前看的时候就是简单过了一遍,很多细节没有清楚。这篇笔记包括了李宏毅深度强化学习三个视频长度的内容。
文章目录
- 1. 概念/解释
- 2. Value Function
- 3. State-Action Value Function
- 4. TIP: Target Network
- 5. TIP: Exploration
- 6. TIP: Experience Replay
- 7. DQN
- 7.1. Double DQN
- 7.2 Dueling DQN
- 7.3. Prioritized Experience Replay
- 7.4 Balance between MC and TD
- 7.5. Noisy NET
- 7.6 Distributional Q-Function
- 7.7 Rainbow
- 8. Continuous Actions
- 9. Actor-Critic
- 10. Asynchronous Advantage Actor-Critic(A3C)
- 11. Pathwise Derivative Policy Gradient
- 12. 补充
1. 概念/解释
| 概念 | 解释 |
|---|---|
| Critic | 与Actor不同,Critic负责评论当前的行为,预测期望价值 |
| V π ( s ) V^pi(s) Vπ(s) | 在遇到状态s以后,可以得到的累计奖励值(这个值和s、 π pi π均有关系) |
| Q π ( s , a ) Q^pi(s,a) Qπ(s,a) | 使用 π pi π作为actor的时候,在状态s下采取动作a的期望的累计奖励(cumulated reward)。 |
| DQN | Q-Learning+深度学习(采用了TargetNetwork和Experience Replay的方法训练) |
| Q-function | 即在某一个 state 采取某一个action,使用 actor π pi π ,得到的 accumulated reward 的期望值有多大 |
2. Value Function
MC估计V
Monte-Carlo 方法,通过采样来近似得到Value函数。
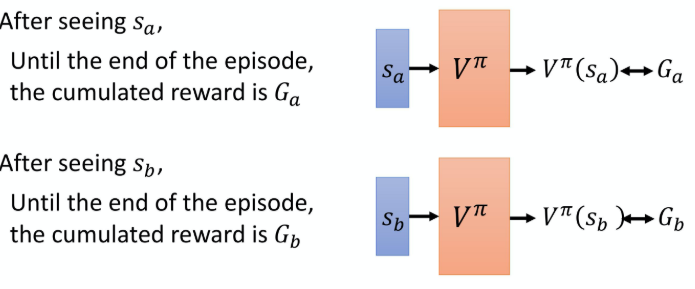
在遇到不同state的情况下,计算对应的accumulated reward G t G_t Gt。在训练的过程就是一个回归问题,将value function的值回归到 G t G_t Gt。
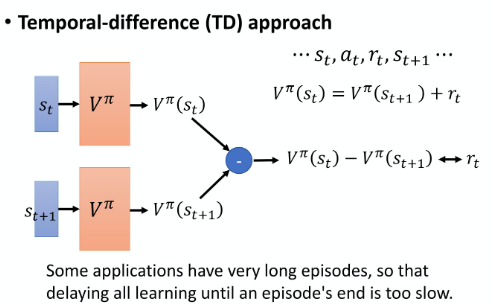
TD 估计V
V
π
(
s
t
)
=
V
π
(
s
t
+
1
)
+
r
t
V^{pi}left(s_{t}right)=V^{pi}left(s_{t+1}right)+r_{t}
Vπ(st)=Vπ(st+1)+rt
基于以上式子,只要有任意一个s,a,r,s的片段,就可以用来训练。训练过程如下图所示:
对比两种方法
-
MC存在很大的Variance,因为是累积的reward,这样会导致Larger Variance。
-
TD虽然有着smaller variance,但是 V π ( s t + 1 ) V^pi(s_{t+1}) Vπ(st+1)有可能是不准确的。
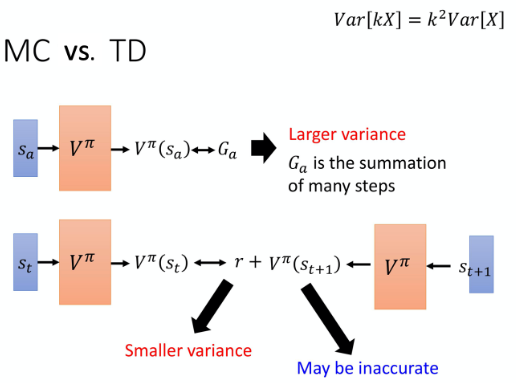
TD由于其灵活性,数据可以重复利用,所以比较常见。
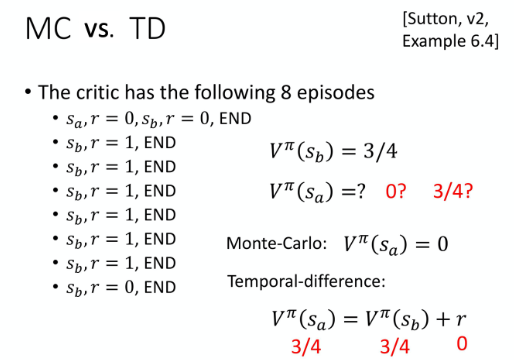
举个计算的例子:
3. State-Action Value Function
引入另外一种critic,Q-function(State-Action Value Function)。
Value Function仅仅通过看到的状态s就开始判断价值,这里引入动作a,意义是 Q π ( s , a ) Q^pi(s,a) Qπ(s,a) 代表使用 π pi π作为actor的时候,在状态s下采取动作a的期望的累计奖励(cumulated reward)。
思考: π pi π本身会决定在遇到s的时候,应该采取哪个action,那么这里的Q怎么理解呢?
其实就是在state s的时候强制采取action a,然后得到的垒起奖励,才是 Q π ( s , a ) Q^pi(s,a) Qπ(s,a)
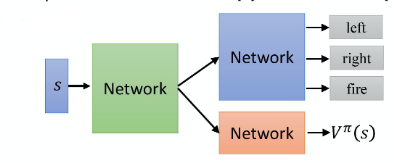
第一篇文章中就有讲action space分为离散的(discrete)和连续的(continuous)
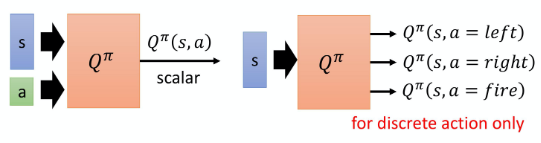
上图左侧代表输出的是一个数值。右侧代表在状态s下,采取不同的action所对应的Q函数。
Q-Learning一般流程
Q-Learning这种方式和policy gradient不同:
- Policy gradient的目标就是学习策略 π pi π, 给定一个s就可以输出选择的动作a。
- Q-Learning则是以一种间接的方法实现了这个目的。在给定一个状态s后,如果有了Q函数,那就可以决定采取哪个function可以得到的期望值更高。
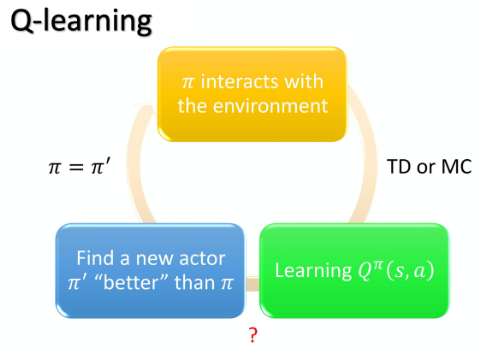
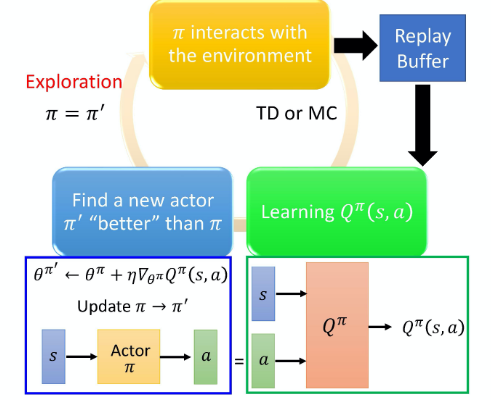
描述一下整个流程,初始的 π pi π和环境进行交互(一开始随机初始化的策略肯定很差),然后会收集一系列episode带来的数据。然后去衡量这个actor在某一个s强制采取a以后的期望,计算Q Value。学习得到的Q函数得到的新策略 π ′ pi ' π′是一定要比原actor策略更好的。
这样迭代下去,可以保证policy是越来越好的。
那么新策略 π ′ pi ' π′是如何指定的?
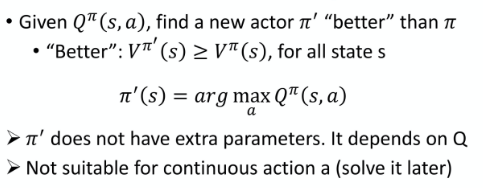
- 策略是通过最大化Q Function得到的,所以可以保证在同一个状态s下,新的策略不比旧的策略差。
- 这里的策略和policy gradient不一样,并没有参数。是通过Q function来计算得到的。
- 需要说明的是,由于采用了argmax的形式,那也就是默认action space是离散的,单纯的Q-Learning无法解决连续动作空间的问题,随后会提出新的算法解决这个问题。
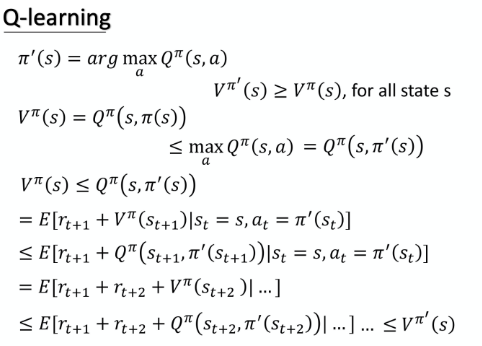
推到步骤如下:
4. TIP: Target Network
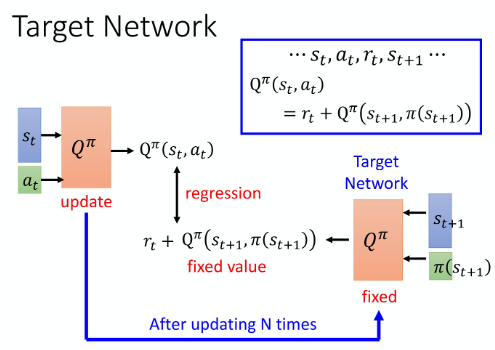
具体怎么实现?
通过actor与环境交互,得到一系列轨迹,s,a,r,s,通过以下公式回归求解问题:
Q
π
(
s
t
,
a
t
)
=
r
t
+
Q
π
(
s
t
+
1
,
π
(
s
t
+
1
)
)
mathrm{Q}^{pi}left(s_{t}, a_{t}right) =r_{t}+mathrm{Q}^{pi}left(s_{t+1}, pileft(s_{t+1}right)right)
Qπ(st,at)=rt+Qπ(st+1,π(st+1))
实际回归的时候,会发现由于左右两边都在变化,这样训练会很不稳定。这个问题解决方案是:固定右边的Q-Network(负责产生target,所以叫做target network),只update左边的Q-Network的参数。然后每过N次,将左侧Q-Network的参数复制给Target Network, 然后重新训练。
5. TIP: Exploration
Exploration在第一篇中就提到过,为了让actor能更好的探索环境,而不是拘泥于之前的经验中。对于Q-function来说,这样可以更好的收集到所有的s,a组成的pair。
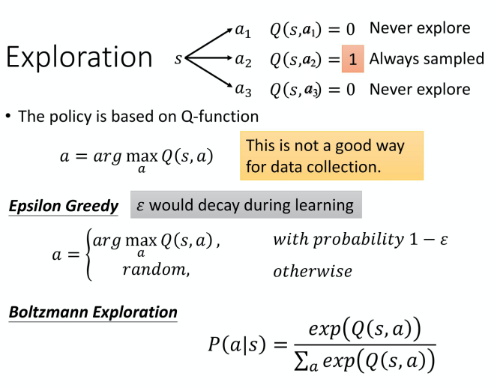
一般采用两种方法:
- Epsilon Greedy: 如上图公式,设置一个很小的 ϵ epsilon ϵ, 以这个为概率进行随即探索。
- Boltzmann Exploration: 这个和Policy Gradient比较相似,Policy Gradient中是生成概率分布,依照概率进行采样,引入了随机性。这里用上图中的公式softmax+Q-function构造了一个概率分布。
6. TIP: Experience Replay
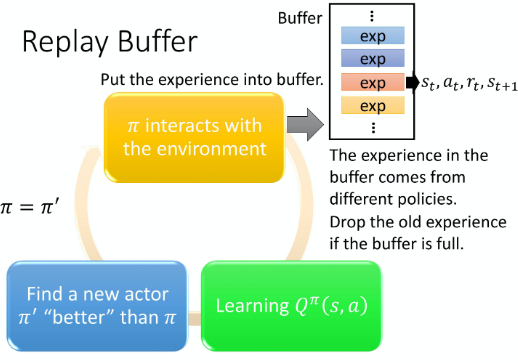
构建Replay Buffer用于经验回放,里边存储的是一系列s,a,r,s序列。
-
Replay Buffer中的experience可能来自不同的policy。
-
Buffer装满了以后,会将旧的资料丢掉。
-
训练Q-function的时候,会随机从buffer中sample一个batch出来,用这些experience来更新Q-function。
-
这样就是off-policy的方法了,能够高效利用experience,不用重复与环境做互动,效率更高。
-
采用sample数据的方法训练critic可以避免同一个batch中的data都是相似的,希望一个batch data具有多样性。
7. DQN
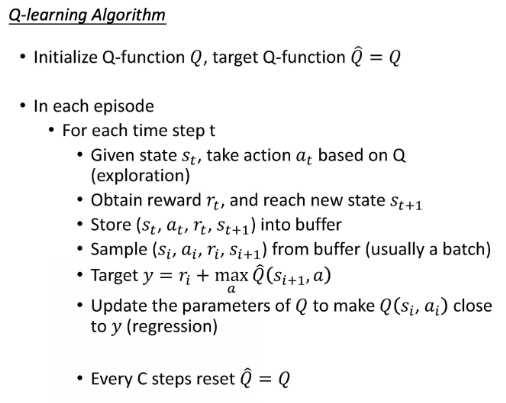
Deep Q-Network 算法伪代码如下:
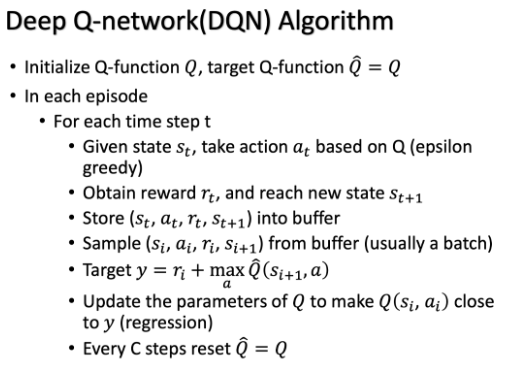
- Target Q-function Q ^ hat{Q} Q^就是上边提到的需要固定的Q-Network, Q是待学习的Q-function。
- 环境的探索使用Epsilon Greedy方法,然后将探索得到的(s,a,r,s)存储到Buffer中供使用。
- 从buffer中sample一个batch,然后回归Target、更新参数。
- 每过C步将Q的参数复制到 Q ^ hat{Q} Q^上。
- DQN和Q-Learning非常相似,不同点在于:
- DQN 将 Q-learning 与深度学习结合,用深度网络来近似动作价值函数,而 Q-learning 则是采用表格存储;
- DQN 采用了经验回放的训练方法,从历史数据中随机采样,而 Q-learning 直接采用下一个状态的数据进行学习。
7.1. Double DQN
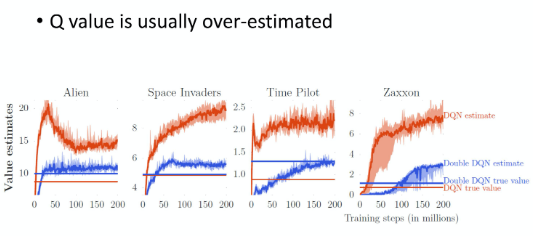
DQN存在一个问题,就是Q-value是被高估的,如上图所示,红色的曲线是DQN的Value, 红色的横线是实际的Value值。
问:为何被高估?
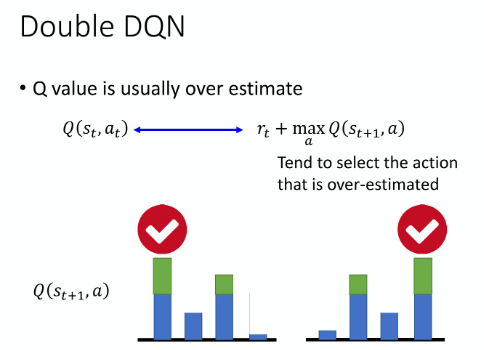
答:DQN的target值容易被设置的过高,因为它总是偏向去取Q-table中最大值。上图中绿色的是被高估的量,被高估以后target就会选择这个action,在此基础上再加上 r t r_t rt作为target value,所以整个过程都是趋向于高估target的。
Double DQN就是为了解决防止估值过高的问题,来看看是怎么做的。
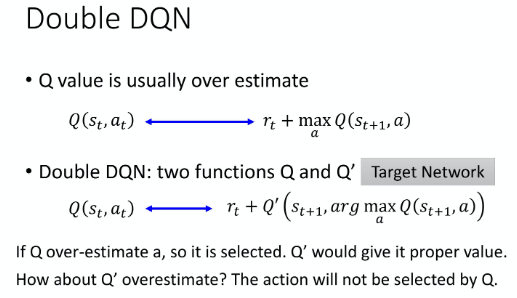
引入两个的Q-network,第一个 Q-network,决定哪一个 action 的 Q value 最大。你用第一个 Q-network 去带入所有的 a,去看看哪一个 Q value 最大。
这种方法如何避免被高估的问题呢:
假设第一个 Q-function 高估了它现在选出来的 action a,那没关系,只要第二个 Q-function Q ′ Q' Q′ 没有高估这个 action a 的值,那你算出来的就还是正常的值。
假设反过来是 Q ′ Q' Q′ 高估了某一个 action 的值,那也没差, 因为反正只要前面这个 Q 不要选那个 action 出来就没事了。
通俗理解就是,两个人一起做商量着决定往往要比一个人武断决定要好很多。类似行政和立法是分立的,相互制约。
Q:哪里来的两个Q-Network呢?
A: 一个是 target 的 Q-network,一个是真正你会 update 的 Q-network。在 Double DQN 里面,会拿 update 参数的那个 Q-network 去选 action,然后拿 target 的network,那个固定住不动的 network 去算 value。而 Double DQN 相较于原来的 DQN 的更改是最少的,它几乎没有增加任何的运算量,连新的 network 都不用,因为原来就有两个 network 了。
7.2 Dueling DQN
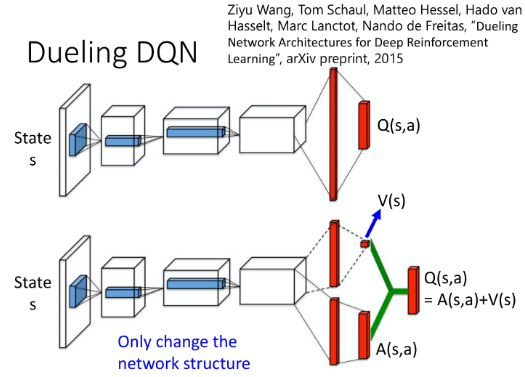
这个也很简单,改了一下模型的结构而已,不直接output Q value 的值,它分成两条 path 去运算,第一个 path 算出一个 scalar,这个 scalar 我们叫做 V ( s ) V(s) V(s)。因为它跟input s 是有关系,所以叫做 V ( s ) V(s) V(s), V ( s ) V(s) V(s) 是一个 scalar。下面这个会 output 一个 vector,这个 vector 叫做 A ( s , a ) A(s,a) A(s,a)。下面这个 vector,它是每一个 action 都有一个 value。然后你再把这两个东西加起来,就得到你的 Q value。
7.3. Prioritized Experience Replay
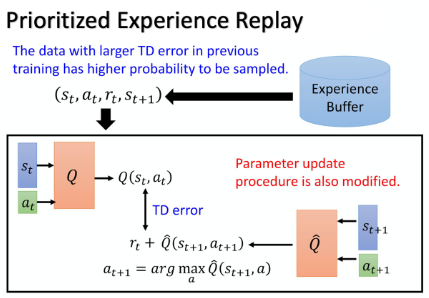
这是一个从buffer中sample experience的技巧,因为buffer中并不是所有data都是平等的,有的data比较重要。比如有的数据的TD error特别大,说明这种data难度很大,那最好给他更高的概率被sample到,给予它更高的优先级priority。
实际上在做 prioritized experience replay 的时候,不仅会更改 sampling 的 process,还会因为更改了 sampling 的 process,更改 update 参数的方法。所以 prioritized experience replay 不仅改变了 sample data 的 distribution,还改变了 training process。
7.4 Balance between MC and TD
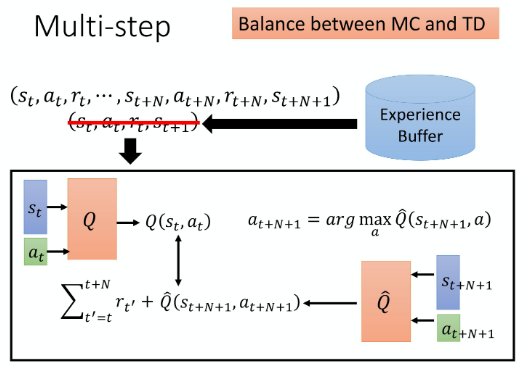
MC 跟 TD 的方法各自有各自的优劣,怎么在 MC 跟 TD 里面取得一个平衡呢?
- 在 TD 里面,在某一个 state s t s_t st 采取某一个 action a t a_t at 得到 reward r t r_t rt,接下来跳到那一个 state s t + 1 s_{t+1} st+1。但是可以不要只存一个 step 的data,我们存 N 个 step 的 data。
- 记录在 s t s_t st 采取 a t a_t at,得到 r t r_t rt,会跳到什么样 s t s_t st。一直纪录到在第 N 个 step 以后,在 s t + N s_{t+N} st+N采取 a t + N a_{t+N} at+N得到 reward r t + N r_{t+N} rt+N,跳到 s t + N + 1 s_{t+N+1} st+N+1 的这个经验,都存下来。
- 要算 target value 的话,要再加上 multi-step 的 reward ∑ t ′ = t t + N r t ′ sum_{t^{prime}=t}^{t+N} r_{t^{prime}} ∑t′=tt+Nrt′ ,multi-step 的 reward 是从时间 t 一直到 t+N 的 N 个reward 的和。然后希望 Q ( s t , a t ) Q(s_t,a_t) Q(st,at) 和 target value 越接近越好。
7.5. Noisy NET
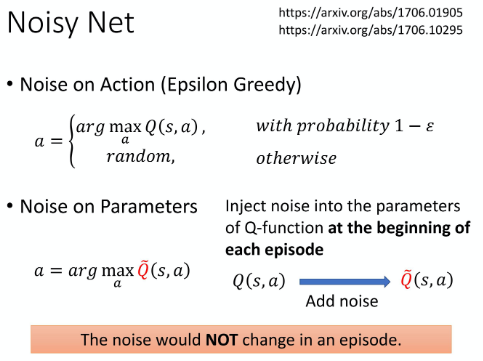
之前讲的 Epsilon Greedy 这样的 exploration 是在 action 的 space 上面加 noise; 有另外一个更好的方法叫做Noisy Net,它是在参数的 space 上面加 noise。
Noisy Net 的意思是说,每一次在一个 episode 开始的时候,要跟环境互动的时候,就把 Q-function 拿出来,在 network 的每一个参数上面加上一个 Gaussian noise,把原来的 Q-function 变成
Q
~
tilde{Q}
Q~ (代表一个Noisy Q-function)。接下来用这个固定住的 noisy network 去玩这个游戏,直到游戏结束,才重新 sample 新的 noise。
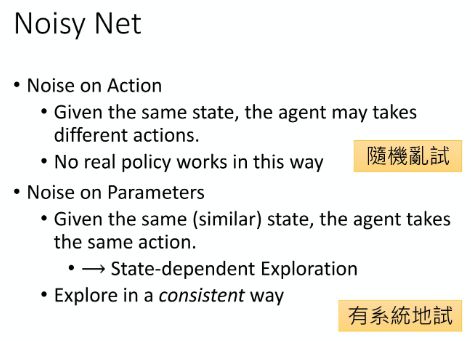
Noise on Action 相当于以随机的概率胡乱采取action,并不符合真实的策略。
Noise on Parameters 在权重层面添加noisy,这样遇见了相似的状态的时候,可能依然会采取相同的策略,这就是基于状态的探索。
7.6 Distributional Q-Function
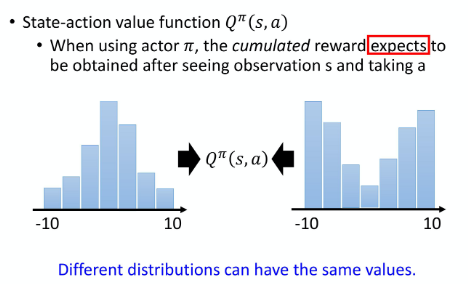
由于Q是一个均值,由很多值平均得到。上图中左右两边的均值是一样的,但是每个值的分布是不同的,比如左边的reward概率都集中在0附近。这个信息在传统的Q-learning方法中就被忽视掉了。
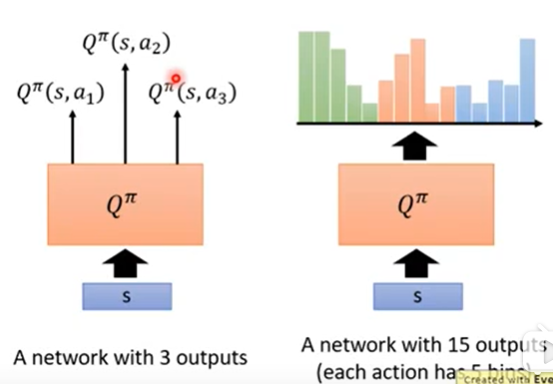
上图左侧是传统Q-learning,右侧是Distributional Q-function,每个action拆成5个bin,直接预测在某一个bin中的概率,根据bin所属action选取action。
7.7 Rainbow
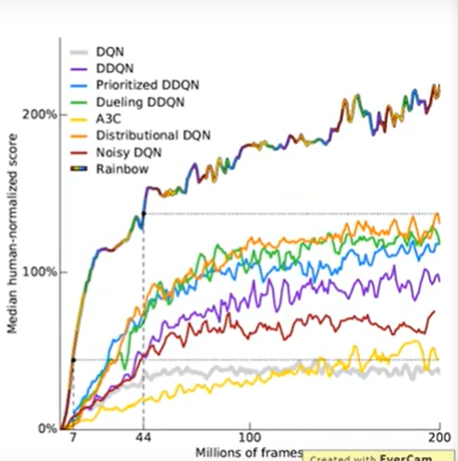
综合以上所有方法,组成了彩虹。
8. Continuous Actions
https://www.bilibili.com/video/BV1MW411w79n?p=5
Q-learning相比于Policy Gradient很好训练,Policy Gradient一旦遇到状态比较多的,就很难继续训练下去了。但是Q-learning存在的最大的问题就是无法很好的解决action space为连续的情况。
a
=
a
r
g
m
a
x
a
Q
(
s
,
a
)
a=argmax_{a}Q(s,a)
a=argmaxaQ(s,a)
Q-learning中策略主要依赖以上公式,以上公式必须要满足action是discrete的条件。那有什么解决办法呢?
Solution 1
Sample 更多的action,用尽可能多的action逼近连续action space。这种方法效率很低,并且不够精确。
Solution 2
**使用Graident Ascent方法来解决这个优化问题。**既然是optimization的问题,可以用gradient ascent, 将a作为parameter,找一个a可以maximize的Q-function。缺点是运算量很大,并且不见得能找到这个optimal的结果。
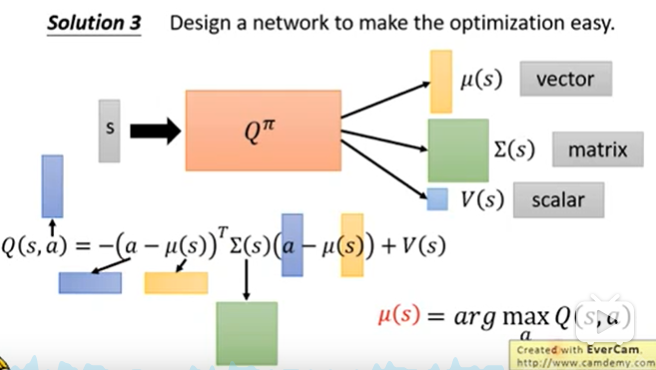
Solution 3
专门设计一个network网络架构,设计Q-function,让求解arg max的问题便容易。
9. Actor-Critic
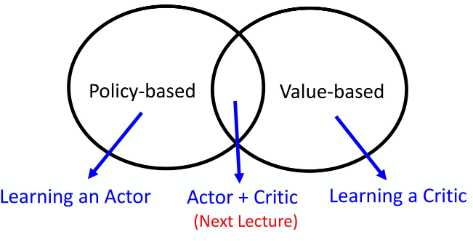
Actor-Critic是集合了两者的优点而设计出来的,先进行Policy Gradient的Review:
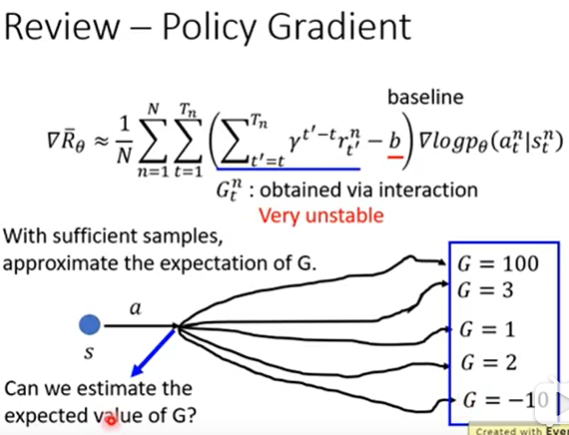
G t n G_t^n Gtn 集合了从当前状态到最终的全部reward,是一个random variable,由于累积多个random variable,所以存在很大的不确定性,非常不稳定,如上图所示。如何更好得估测这个 G t n G_t^n Gtn呢?
- 引入State value Function V π V^pi Vπ
- 引入State-action Value Function Q π ( s , a ) Q^pi(s,a) Qπ(s,a)
两者都可以更准确、更好的依据当前状态判断未来可以得到的reward期望值。两者的估计可以用TD(训练比较稳)或者 MC(结果更加精确)
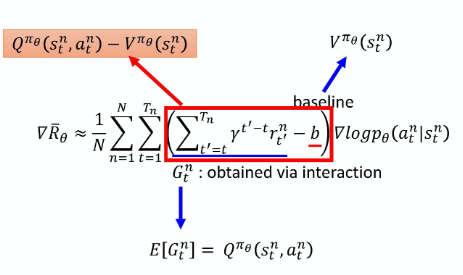
Actor-critic通过引入以上两个状态函数,就可以将Policy Gradient改成以上的样子。
实现的时候,如果按照以上公式准备,那就需要两个network,分别学习Q函数和V函数。两个network可能会带来的不确定的风险,所以能不能只用一个network呢?
有以下公式:
Q
π
(
s
t
n
,
a
t
n
)
=
r
t
n
+
V
π
(
s
t
+
1
n
)
Q^{pi}left(s_{t}^{n}, a_{t}^{n}right)=r_{t}^{n}+V^{pi}left(s_{t+1}^{n}right)
Qπ(stn,atn)=rtn+Vπ(st+1n)
带入公式:
Q
π
θ
(
s
t
n
,
a
t
n
)
−
V
π
θ
(
s
t
n
)
Q^{pi_{theta}}left(s_{t}^{n}, a_{t}^{n}right)-V^{pi_{theta}}left(s_{t}^{n}right)
Qπθ(stn,atn)−Vπθ(stn)
得到:
r
t
n
+
V
π
(
s
t
+
1
n
)
−
V
π
(
s
t
n
)
r_{t}^{n}+V^{pi}left(s_{t+1}^{n}right)-V^{pi}left(s_{t}^{n}right)
rtn+Vπ(st+1n)−Vπ(stn)
这就是Advantage Function,A2C的整个流程如下图所示:
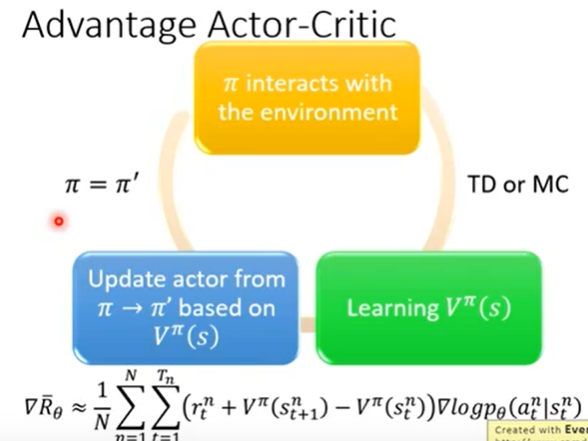
A2C的小TIP:
-
actor π ( s ) pi(s) π(s)和critic V π ( s ) V^pi(s) Vπ(s)的参数是共享的。
-
exploration机制,对 π pi π 的 output 的 distribution 进行约束。这个约束是希望这个 distribution 的 entropy不要太小,希望不同的 action 它的被采用的机率,平均一点。这样在测试的时候,才会多尝试各种不同的 action,才能更充分探索环境。
Question: 在讲解TD 估计V的时候存在以下公式:
V π ( s t ) = V π ( s t + 1 ) + r t V^{pi}left(s_{t}right)=V^{pi}left(s_{t+1}right)+r_{t} Vπ(st)=Vπ(st+1)+rt那将这个公式带入:
r t n + V π ( s t + 1 n ) − V π ( s t n ) r_{t}^{n}+V^{pi}left(s_{t+1}^{n}right)-V^{pi}left(s_{t}^{n}right) rtn+Vπ(st+1n)−Vπ(stn)
直接0,这个如何解释?Answer: @来自助教江季&老板
主要是TD那个公式,上边讲解TD公式的时候,其实表达并不严谨,只是为了方便读者理解,严谨的表达式如下:
V ( S t ) ← E π [ R t + 1 + γ V ( S t + 1 ) ] V(S_t)larr E_pi[R_{t+1}+gamma V(S_{t+1})] V(St)←Eπ[Rt+1+γV(St+1)]TD中使用的蒙特卡洛估计来计算Value函数的值,而在A2C中,使用的是网络进行估计的值,所以不满足等式: V π ( s t ) = V π ( s t + 1 ) + r t V^{pi}left(s_{t}right)=V^{pi}left(s_{t+1}right)+r_{t} Vπ(st)=Vπ(st+1)+rt
10. Asynchronous Advantage Actor-Critic(A3C)
A2C缺点是训练太慢,如何改进呢?引入分布式的方法,多个agent同时训练。
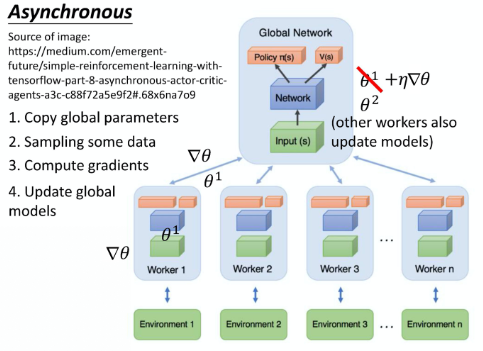
每个线程都负责一个agent,去跟环境做交互。具体过程如下:
- 线程copy global Network的参数,复制一份。
- 采样一些数据experience进行学习
- 计算梯度
- 将梯度更新到global network.
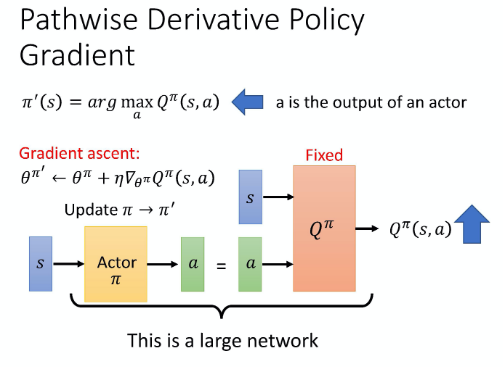
11. Pathwise Derivative Policy Gradient
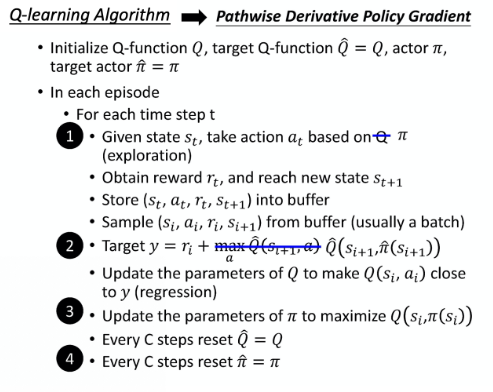
这是一种Q-learning解决continuous action space的方法,可以看作一个特别的actor-critic。
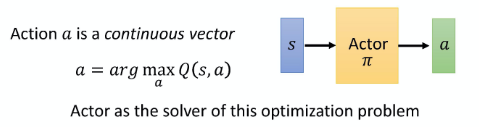
如何解这个optimization问题?用一个actor来求解。假设actor就是一个solver,其工作就是给出state s以后,求解哪一个a能带来最大的Q value。
和GAN进行对比:
| GAN | A3C | |
|---|---|---|
| 生成 | generator | Actor |
| 评判 | discriminator | Critic |
- 对原来的Q-learning进行改进,learn一个actor,用于求解argmax的问题,也就是上述的solution 3
- 原来的actor-critic中,critic并没有给actor足够多的信息,只告诉其好或者不好,没有指导。现在的新方法直接告诉actor什么action才是更好的。
具体的算法:
算法流程:
Q-learning algorithm:
Q-learning改成Pathwise Derivative Policy Gradient方法:
AC和GAN之间的联系:
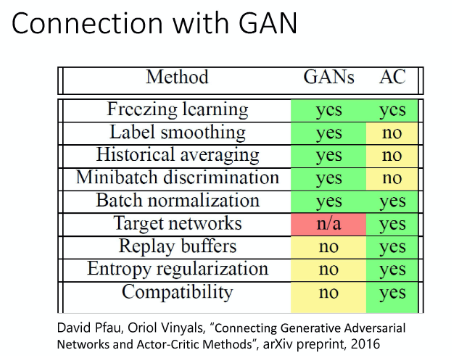
GAN和AC都是以难训练出名的,这两者可以互相借鉴一些训练的思路和解决方案。
12. 补充
为什么在DQN中采用价值函数近似(Value Function Approximation)的表示方法?
答:首先DQN为基于深度学习的Q-learning算法,而在Q-learning中,我们使用表格来存储每一个state下action的reward,即我们前面所讲的状态-动作值函数 Q ( s , a ) Q(s,a) Q(s,a) 。但是在我们的实际任务中,状态量通常数量巨大并且在连续的任务中,会遇到维度灾难的问题,所以使用真正的Value Function通常是不切实际的,所以使用了价值函数近似(Value Function Approximation)的表示方法。
最后
以上就是眯眯眼月饼最近收集整理的关于【深度强化学习】6. Q-Learning技巧及其改进方案的全部内容,更多相关【深度强化学习】6.内容请搜索靠谱客的其他文章。








发表评论 取消回复