论文阅读:CPU上的高精度实时人脸检测器
综述
人脸识别是计算机视觉和模式识别的基础问题,过去几十年取得了长足进步,但是由于计算量较大,在CPU上的实时检测一直没有很好的被解决。面临的主要问题,一是人脸和背景的可变性都太大(种类太多),二是由于人脸的不同尺寸,使得搜索空间快速上升。
过去的主流方法,一种是基于手动构建的特征(hand-craft features),这种方法在CPU上速度尚可,但是面对种类繁多的图像变体精确度不足。另一种是基于CNN的方法,精确度足够,但是在CPU上过于耗时,很难达到实时效果。
本文受Faster-RCNN中RPN、SSD中多尺度技术的影响,提出了一种名为FaceBoxes的人脸检测器并且可以在CPU上达到实时检测的效果。网络结构是一个完整的CNN架构,可以实现端到端的训练,虽然网络结构轻量,但效果突出。包含了RDCL和MSCL。
1. RDCL
Rapidly Digested Convolutional Layers (RDCL)旨在让检测器在CPU上达到实时检测的速度。
- 1.通过在卷积层和池化层设置较大的stride size来很快的减小input size。
- 2.选择合适的kernel size。前几层的kernel应该小一些这样达到加速计算的效果,同时也不能过小,要保证它可以缓解(1)中较大的步长带来的信息损失
- 3.用C.ReLU激活函数来减少输出通道。
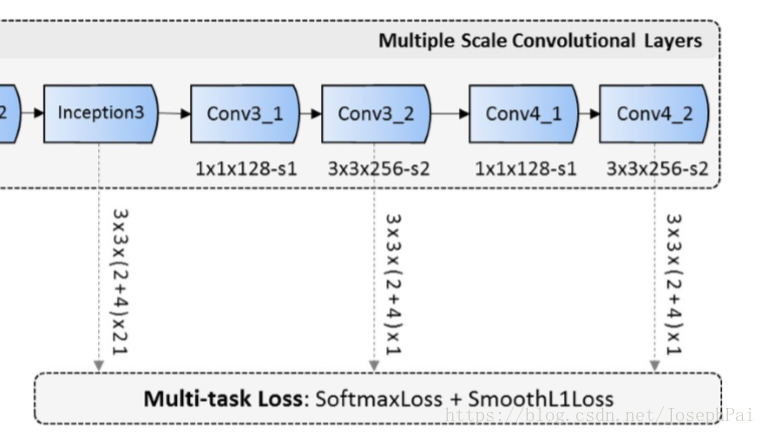
2. MSCL
Multiple Scale Convolutional Layers (MSCL)旨在让感受野更加丰富,为不同尺度的anchor设置不同的检测层,来检测不同尺度的人脸。
在网络 深度 的维度进行多尺度设计
思路和上一篇论文相同,设置不同尺度的anchor,分别与不同层级的layer关联,在不同尺度分别检测。
在网络 宽度 的维度进行多尺度设计
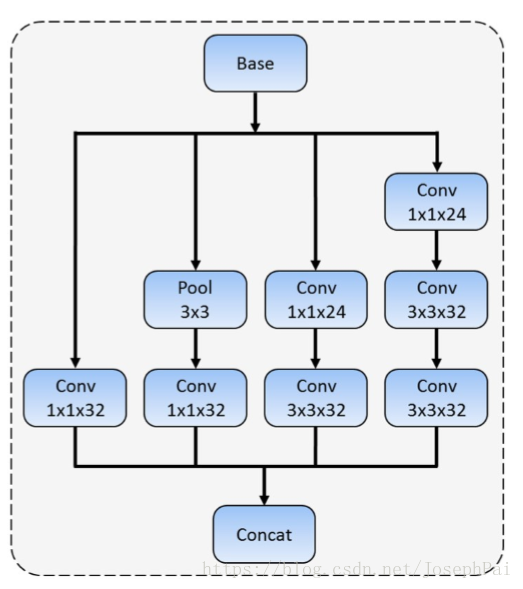
显然,这样的设计包罗了各种不同的尺度,可以使感受野更加丰富,从而很好的处理各种不同尺度的人脸。
3. anchor密度设计
同时还使用了一些小技巧使得不同的anchor在图片上密度相同,有效提高了小型人脸的召回率。(其实这一点在上一篇论文里也用到过,毕竟都是自动化所的论文)在人脸识别中,我们一般把anchor的长宽比置为1,因为一般方框可以正好框住一张人脸。anchor的间隔对应的就是stride size,比如某一层的stride size为64,anchor是256*256,意味着每64个像素就有一个256*256的anchor。定义anchor密度为

A-scale是anchor的尺度大小,A-interval是间隔(也就是stride size)
不同密度anchor会对检测的效果造成影响,因此尽量追求密度均衡。给A-density设置固定值。实现方式也是通过设置不同的stride size
Reference
Zhang, Shifeng, et al. “Faceboxes: A CPU real-time face detector with high accuracy.” Biometrics (IJCB), 2017 IEEE International Joint Conference on. IEEE, 2017.
最后
以上就是炙热云朵最近收集整理的关于[CV Paper] FaceBoxes: A CPU Real-time Face Detector with High Accuracy的全部内容,更多相关[CV内容请搜索靠谱客的其他文章。




![[CV Paper] FaceBoxes: A CPU Real-time Face Detector with High Accuracy](https://www.shuijiaxian.com/files_image/reation/bcimg23.png)



发表评论 取消回复