---《Linux设备驱动程序》。
阻塞与非阻塞访问、poll()函数提供了较好地解决设备访问的机制,但是如果有了异步通知整套机制就更加完整了。异步通知的意思是:一旦设备就绪,则主动通知应用程序,这样应用程序根本就不需要查询设备状态,这一点非常类似于硬件上“中断”的概念,比较准确的称谓是“信号驱动的异步I/O”。信号是在软件层次上对中断机制的一种模拟,在原理上,一个进程收到一个信号与处理器收到一个中断请求可以说是一样的。信号是异步的,一个进程不必通过任何操作来等待信号的到达,事实上,进程也不知道信号到底什么时候到达。阻塞I/O 意味着一直等待设备可访问后再访问,非阻塞I/O 中使用poll()意味着查询设备是否可访问,而异步通知则意味着设备通知自身可访问,实现了异步I/O。--- 宋宝华《Linux设备驱动程序开发详解》。
二、异步通知的实现方法
2.1 从应用程序application的角度考虑
为了启用文件的异步通知机制,用户程序必须执行两个步骤:首先,它们指定一个进程作为文件的“属主(owner)”,当进程使用fcntl系统调用执行F_SETOWN命令时,属主进程的进程ID号就被保存在filp->f_owner中。
int fcntl(int fd, int cmd, ... /* arg */ );
F_SETOWN(long):Set the process ID or process group ID that will receive SIGIO and SIGURG signals for events on file descriptor fd to the ID given in arg. A process ID is specified as a positive value; a process group ID is specified as a negative value. Most commonly, the calling process specifies itself as the owner (that is, arg is specified as getpid(2)).
示例:
fcntl(fd, F_SETOWN, getpid());// 告诉驱动,发信号谁(哪个进程)
其次,为了真正启用异步通知机制,用户程序还必须在设备中设置FASYNC标志,这通过fcntl的F_SETFL命令完成。
F_SETFL (long):Set the file status flags to the value specified by arg. File access mode (O_RDONLY, O_WRONLY, O_RDWR) and file reation flags (i.e., O_CREAT, O_EXCL,O_NOCTTY, O_TRUNC) in arg are ignored. On Linux this command can change only the O_APPEND, O_ASYNC, O_DIRECT, O_NOATIME, and O_NONBLOCK flags.
示例:
fcntl(fd, F_SETFL, Oflags | FASYNC); // 改变fasync标记,最终会调用到驱动的faync > fasync_helper:初始化/释放fasync_struct
2.2 从驱动程序的角度考虑
驱动程序实现异步信号的方法:
①. F_SETOWN被调用时对filp->f_owner赋值。
②. 在执行F_SETFL启用FASYNC时,调用驱动程序的fasync方法。只要filp->f_flags中的FASYNC标志发生了变化,就会调用该方法,以便把这个变化通知驱动程序,以使其能正确相应。文件打开时,FASYNC标志被默认是清除的。
③. 当数据到达时,所有注册为异步通知的进程都会被发送一个SIGIO信号,该信号由驱动程序发出。
设备驱动中异步通知编程比较简单,主要用到一项数据结构和两个函数。数据结构是fasync_struct 结构体,两个函数分别是:
a. 当一个打开的文件的FASYNC标志被修改时,调用下面函数处理FASYNC 标志变更。
int fasync_helper(int fd, struct file * filp, int on, struct fasync_struct **fapp);
b. 当数据到达时,用下面的语句来通知异步读取进程,(发送信号给进程)。
void kill_fasync(struct fasync_struct **fp, int sig, int band);
三、一个示例
该示例来自韦东山老师的视频教程第一期,下载地址,其针对JZ2440进行了讲解,我将其修改到了我的mini2440上,修改后的完整程序 fasync.rar
fasync.rar
视频中总结了如下几点:
驱动目的:按下按键时,驱动通知应用程序(异步通知),应用程序不会主动去读取键值,有按键按下了,驱动程序发送信号给应用程序(kill_fasync)。实现遵循如下几点,具体可见程序的实现:
①应用程序,注册信号处理函数
signal(SIGIO,my_signal_fun);
②谁发信号??驱动发送
③发给谁??应用程序,要告诉驱动其PID号
fcntl(fd, F_SETOWN, getpid());
④怎么发????
kill_fasync (&buttons_async, SIGIO, POLL_IN);
驱动测试应用程序buttons_int_fasync_drv_test.c
点击(此处)折叠或打开
#include
#include
#include
#include
#include
#include
int fd; //全局变量
void my_signal_fun(int signum)
{
unsigned char key_val;
read(fd,&key_val,1);
printf("key_val:0x%xn",key_val);
}
int main(int argc,char **argv)
{
int ret;
int Oflags;
signal(SIGIO,my_signal_fun);
fd = open("/dev/mini2440_buttons", O_RDWR);
if(fd < 0)
printf("can't openn");
//fcntl
fcntl(fd, F_SETOWN, getpid()); // 告诉内核,发给谁
Oflags = fcntl(fd, F_GETFL);
fcntl(fd, F_SETFL, Oflags | FASYNC); // 改变fasync标记,最终会调用到驱动的faync > fasync_helper:初始化/释放fasync_struct
while(1)
{
sleep(1000);
}
return 0;
}
驱动程序buttons_int_fasync_drv.c
点击(此处)折叠或打开
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#define DEVICE_NAME "mini2440_buttons" //设备名称
static struct class *buttons_int_fasync_drv_class;
static struct class_device *buttons_int_fasync_drv_class_dev;
static DECLARE_WAIT_QUEUE_HEAD(button_waitq); //等待队列:当没有按键被按下时,如果有进程调用buttons_int_fasync_drv_read函数,它将休眠
static volatile int ev_press = 0; //中断事件标志, 中断服务程序将它置1,s3c24xx_buttons_read将它清0
static unsigned char key_val; //保存键值
static struct fasync_struct *buttons_async;
//引脚描述结构体
struct pin_desc{
unsigned int pin;
unsigned int key_value;
};
//管脚数组,按键赋键值,按下时是0x01,松开是0x81(最高位为1)
struct pin_desc pins_desc[6] = {
{S3C2410_GPG0, 0x01},
{S3C2410_GPG3, 0x02},
{S3C2410_GPG5, 0x03},
{S3C2410_GPG6, 0x04},
{S3C2410_GPG7, 0x05},
{S3C2410_GPG11,0x06},
};
//确定按键值
static irqreturn_t buttons_irq(int irq, void *dev_id)
{
//printk("irq = %dn",irq);
struct pin_desc *pindesc = (struct pin_desc *)dev_id;
unsigned int pinval;
pinval = s3c2410_gpio_getpin(pindesc->pin);
if(pinval)
{
//松开
key_val = 0x80 | pindesc->key_value;
}
else
{
//按下
key_val = pindesc->key_value;
}
ev_press = 1;
wake_up_interruptible(&button_waitq);
//kill_fasync(struct fasync_struct * * fp, int sig, int band)
kill_fasync (&buttons_async, SIGIO, POLL_IN);
return IRQ_HANDLED;
}
static int buttons_int_fasync_drv_open(struct inode *inode, struct file *file)
{
int ret;
ret = request_irq(IRQ_EINT8, buttons_irq,IRQT_BOTHEDGE,"KEY1",&pins_desc[0]); //pins_desc[0]传递给buttons_irq
ret = request_irq(IRQ_EINT11,buttons_irq,IRQT_BOTHEDGE,"KEY2",&pins_desc[1]);
ret = request_irq(IRQ_EINT13,buttons_irq,IRQT_BOTHEDGE,"KEY3",&pins_desc[2]);
ret = request_irq(IRQ_EINT14,buttons_irq,IRQT_BOTHEDGE,"KEY4",&pins_desc[3]);
ret = request_irq(IRQ_EINT15,buttons_irq,IRQT_BOTHEDGE,"KEY5",&pins_desc[4]);
ret = request_irq(IRQ_EINT19,buttons_irq,IRQT_BOTHEDGE,"KEY6",&pins_desc[5]);
return 0;
}
ssize_t buttons_int_fasync_drv_read(struct file *file, char __user *buf, size_t size, loff_t *ppos)
{
int ret;
if(size != 1) //读取单个按键
return -EINVAL;
wait_event_interruptible(button_waitq, ev_press); //如果没有按键动作,休眠,让出CPU
ret = copy_to_user(buf, &key_val, 1); //返回键值
ev_press = 0;
return 1;
}
int buttons_int_fasync_drv_close(struct inode *inode, struct file *file)
{
free_irq(IRQ_EINT8, &pins_desc[0]);
free_irq(IRQ_EINT11,&pins_desc[1]);
free_irq(IRQ_EINT13,&pins_desc[2]);
free_irq(IRQ_EINT14,&pins_desc[3]);
free_irq(IRQ_EINT15,&pins_desc[4]);
free_irq(IRQ_EINT19,&pins_desc[5]);
return 0;
}
static unsigned buttons_int_fasync_drv_poll(struct file *file, poll_table *wait)
{
unsigned int mask = 0;
poll_wait(file, &button_waitq, wait); // 不会立即休眠
if (ev_press)
mask |= POLLIN | POLLRDNORM;
return mask;
}
static int buttons_int_fasync_drv_fasync(int fd, struct file *filp, int on)
{
printk("driver:buttons_int_fasync_drv_fasyncn");
return fasync_helper (fd, filp, on, &buttons_async);
}
static struct file_operations buttons_int_fasync_drv_fops = {
.owner = THIS_MODULE,
.open = buttons_int_fasync_drv_open,
.read = buttons_int_fasync_drv_read,
.release = buttons_int_fasync_drv_close,
.poll = buttons_int_fasync_drv_poll,
.fasync = buttons_int_fasync_drv_fasync,
};
int major;
static int __init buttons_int_fasync_drv_init(void)
{
major = register_chrdev(0, DEVICE_NAME, &buttons_int_fasync_drv_fops);
if(major < 0)
{
printk(DEVICE_NAME "t can't register major number!n");
}
buttons_int_fasync_drv_class = class_create(THIS_MODULE, DEVICE_NAME);
buttons_int_fasync_drv_class_dev = class_device_create(buttons_int_fasync_drv_class, NULL, MKDEV(major, 0), NULL, DEVICE_NAME); /* /dev/mini2440_buttons */
printk(DEVICE_NAME"t initialized!n");
return 0;
}
static void __exit buttons_int_fasync_drv_exit(void)
{
unregister_chrdev(major, DEVICE_NAME);
class_device_unregister(buttons_int_fasync_drv_class_dev);
class_destroy(buttons_int_fasync_drv_class);
}
module_init(buttons_int_fasync_drv_init);
module_exit(buttons_int_fasync_drv_exit);
MODULE_LICENSE("GPL");
测试结果:
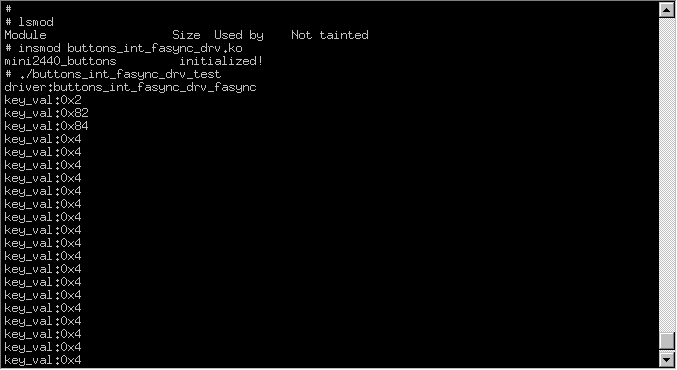
程序中表现出了和poll实现的不同,没有查询,这就是异步的作用,由驱动程序来通知应用程序数据已经就绪,测试未加入按键抖动的处理,按键驱动并不规范,进一步将学习输入子系统(input)~。
最后
以上就是懦弱万宝路最近收集整理的关于linux驱动程序保存变量,Linux设备驱动程序——高级字符驱动程序操作(异步通知)...的全部内容,更多相关linux驱动程序保存变量,Linux设备驱动程序——高级字符驱动程序操作(异步通知)内容请搜索靠谱客的其他文章。








发表评论 取消回复