激光slam:2激光雷达运动畸变去除
- 里程计模型与标定
- 激光雷达传感器介绍
- 运动畸变介绍
- 畸变去除
里程计模型与标定

激光雷达传感器介绍
1.测距原理
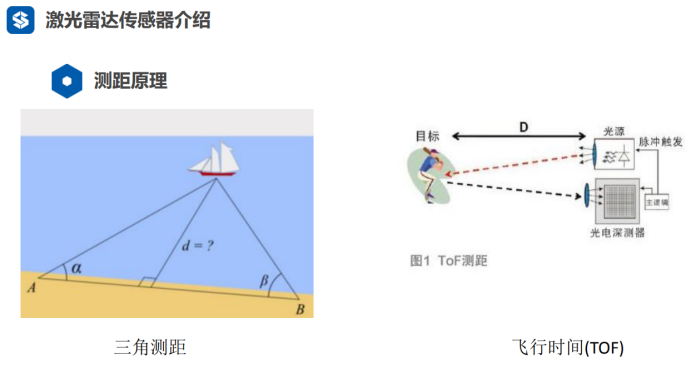

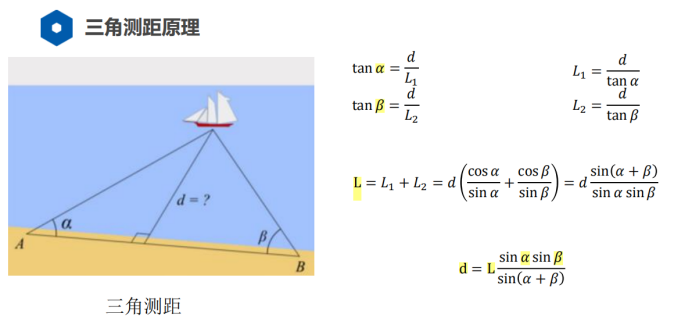
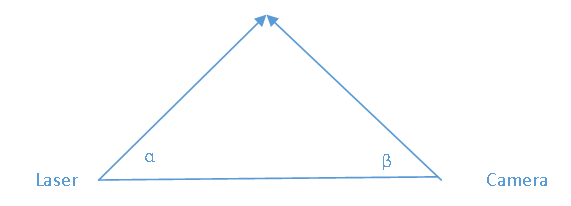
已知α、β、L,其中α、β由标定得到,L由投影得到。求d。
已知α、β、L,角角边,可以唯一确定一个三角形。
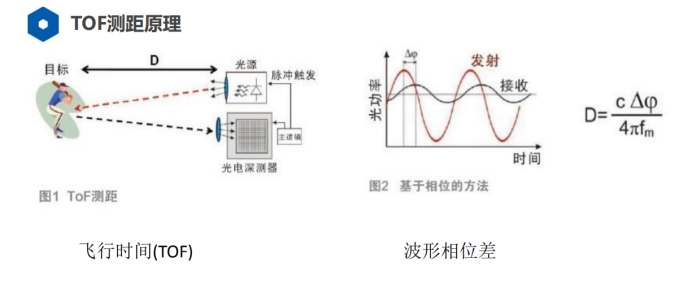
时间t转换为求相位差,提高精度。
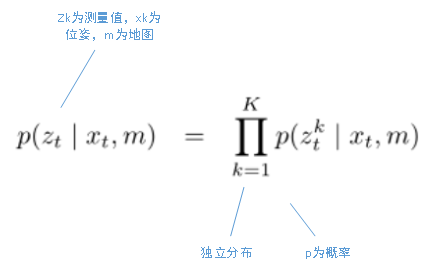
2.数学模型
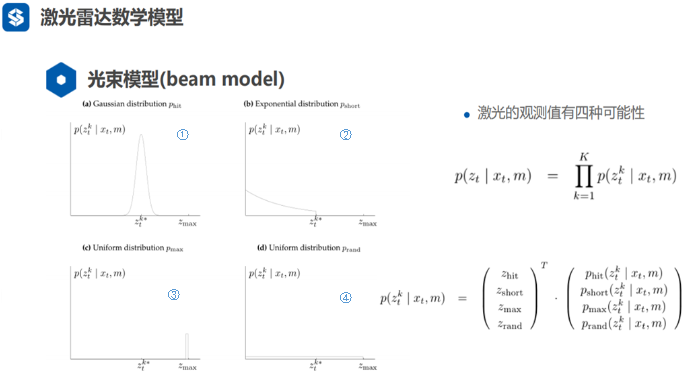
推导过程
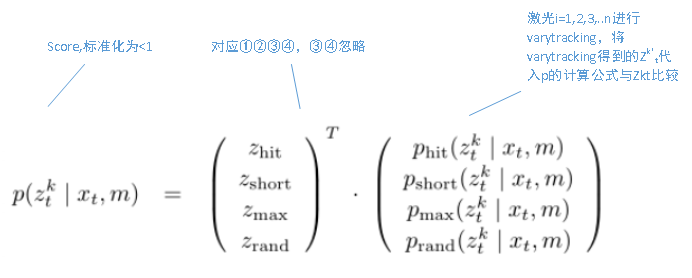
①正态分布—均值d0
②激光被遮挡----指数分布d1
③噪声—出现max—d2
④均值误差----d3
varytracking得到d,则d0=d,d1<d
①②涵盖大部分的情况,③④可以忽略不计
为score,是位姿zk相对于地图的重合程度。
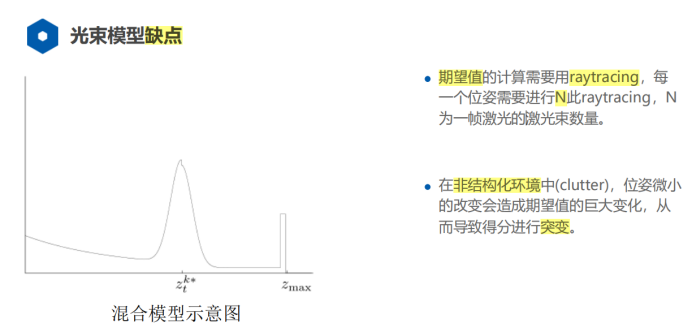
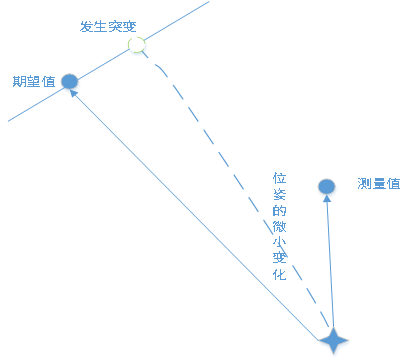
突变:
发生突变时score相对于位姿不平滑。
amcl算法----bean model
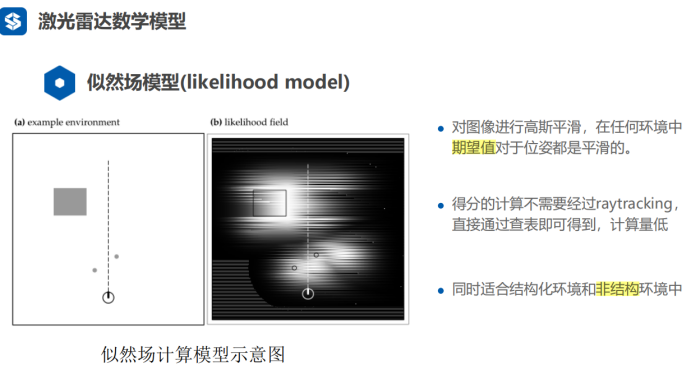
有障碍物环境------消除传感器误差和位姿误差-----不需要期望值
传感器误差和位姿误差等误差形成高斯分布(0,Σ),远离障碍物时值为0,靠近障碍物时值为1.
运动畸变介绍
①激光帧率较低时,机器人的运动不能忽略
5-10hz----畸变很大—相邻位姿角度相差很大,甚至同一激光,有不同的位姿
50hz-畸变很小
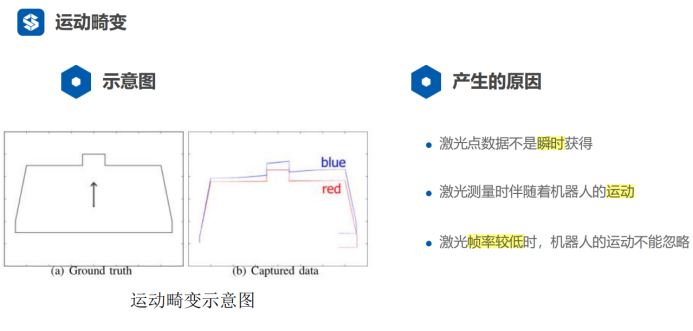
②激光测量时伴随着机器人的运动
③激光点数据不是瞬时获得
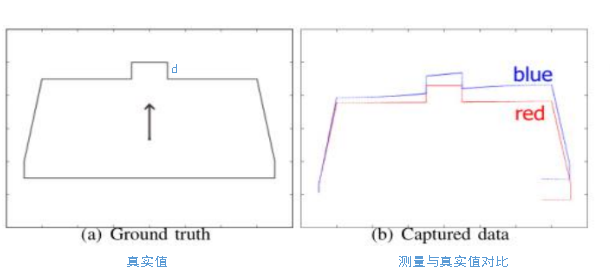
如图,激光点数据不是瞬时获得,使真实测量d变短(blue),小于理想值(red),并且走直线时会有所倾斜。
畸变去除

1.ICP方法
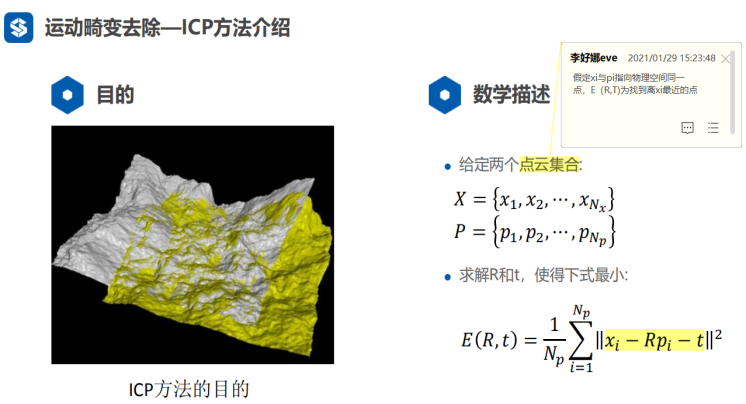
(R,T)为欧式变换
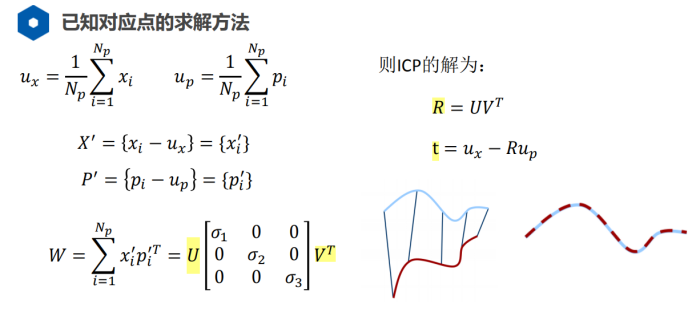
图1为点与点之间的对应(SVM法),图2为ICP的结果
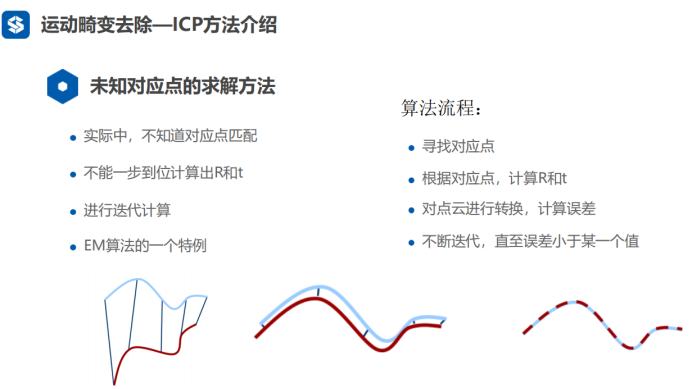
EM算法:A→B,B→A,A→B,B→A,A→B,…
A为(R,T)
B 为point consponse ----隐藏变量
固定A,调整B;固定B,调整A;…
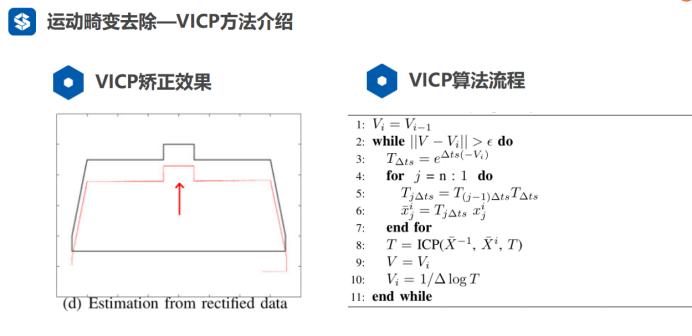
2.VICP方法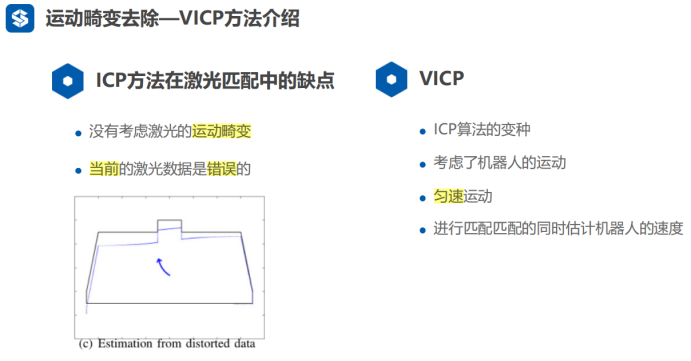
VICP----加了速度
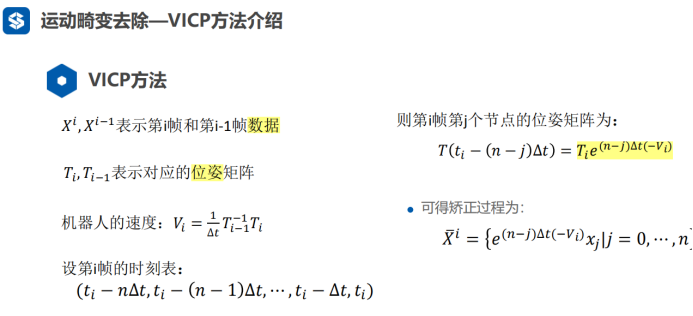
①矫正为运动矫正
②机器人的速度Vi实际为Vi = log(Ti-1-1Ti)
3.里程计辅助方法

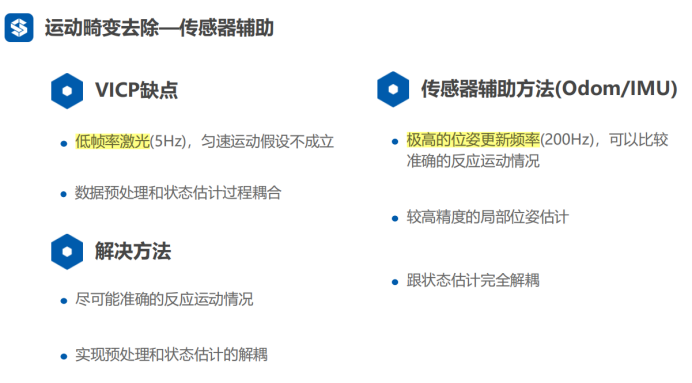
数据预处理与状态估计过程解耦-----两者分开
数据预处理:定位、建图
状态估计:导航
Loam和VICP类似
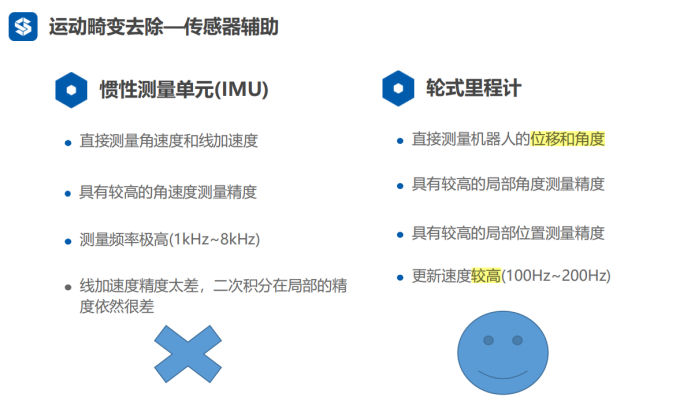
里程计的角度测量精度:500HZ
IMU的测量精度:≥1000HZ
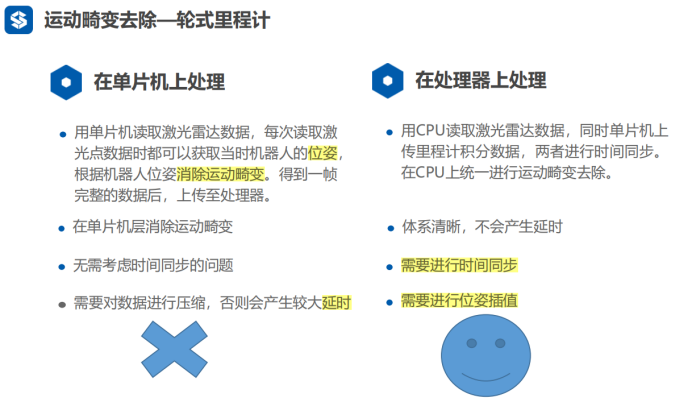
处理器:CPU
在单片机上处理:
发布或者显示出去
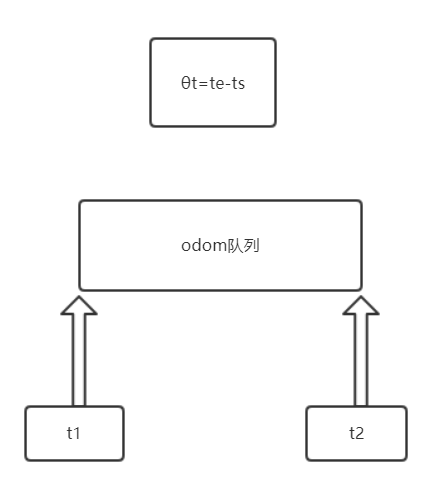
假设匀速运动,5-10ms的误差
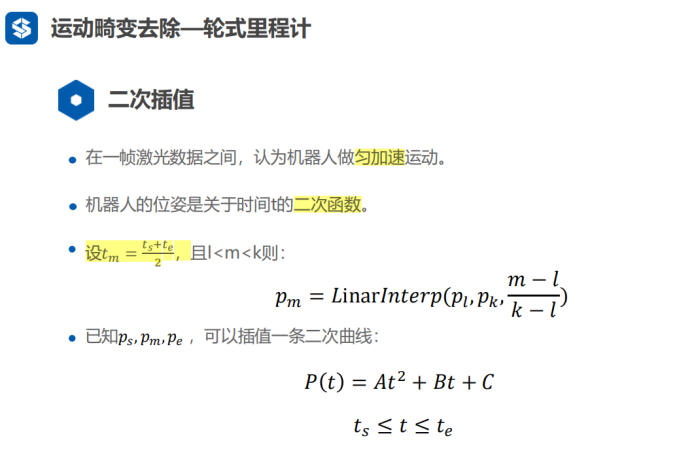
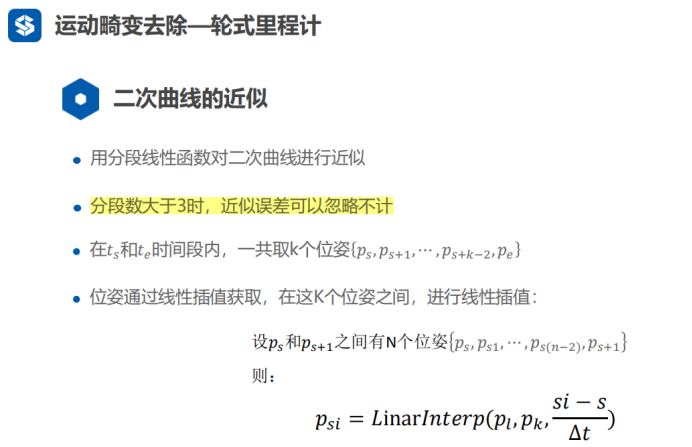
分段数大于3:二次曲线上取2个点
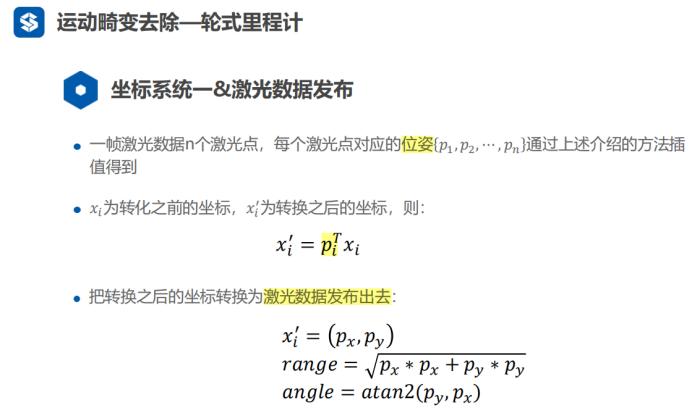
转换前后的坐标:激光前后的坐标
激光数据发布出去:laserscan
最后
以上就是舒适月光最近收集整理的关于激光slam:2激光雷达运动畸变去除里程计模型与标定的全部内容,更多相关激光slam内容请搜索靠谱客的其他文章。








发表评论 取消回复