
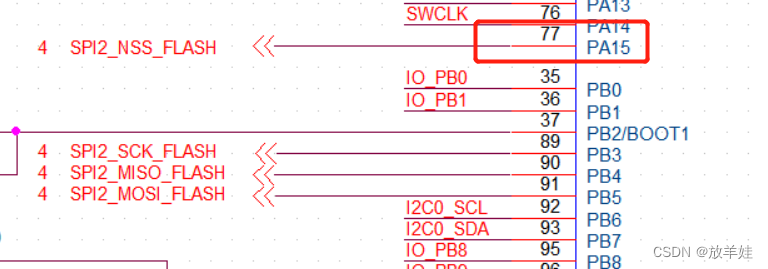

注意,cs引脚必须由rtt控制,但是我这个cs引脚用的是PA15,它默认是jlink的引脚,所以首先要将jlink禁用,如下:
rcu_periph_clock_enable(RCU_AF);
rcu_periph_clock_enable(RCU_GPIOA);
rcu_periph_clock_enable(RCU_GPIOA);
gpio_pin_remap_config(GPIO_SWJ_DISABLE_REMAP,ENABLE);
gpio_init(GPIOA,GPIO_MODE_OUT_PP,GPIO_OSPEED_50MHZ,GPIO_PIN_15);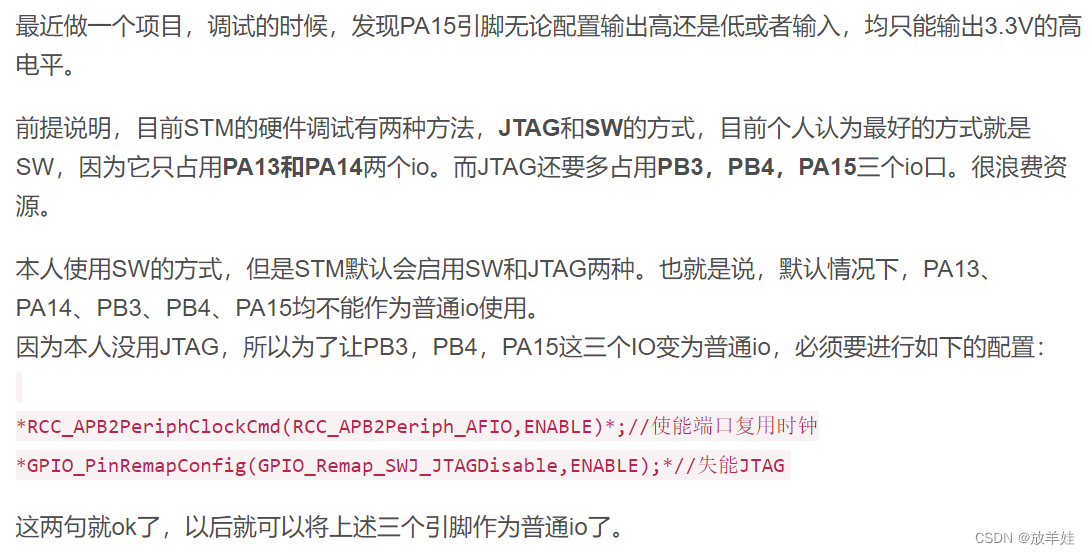

这样就可以正常通信了。
中途发现rtt串口打印显示不全的情况:


是因为串口打印的buffer太小了,需要改大一些:这里默认是128,现在改成500
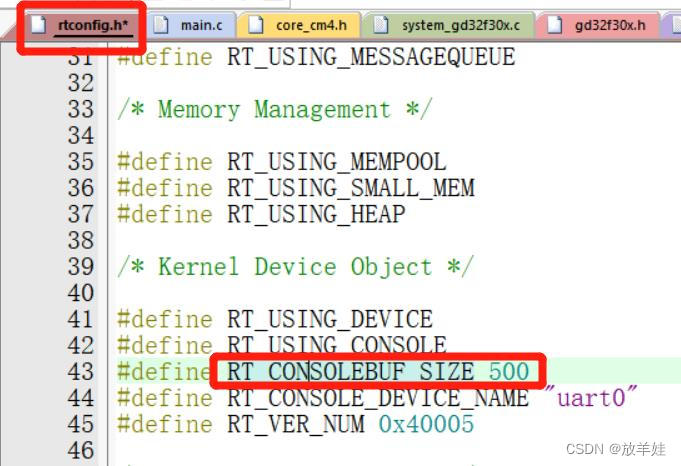
这样就可以打印全了:

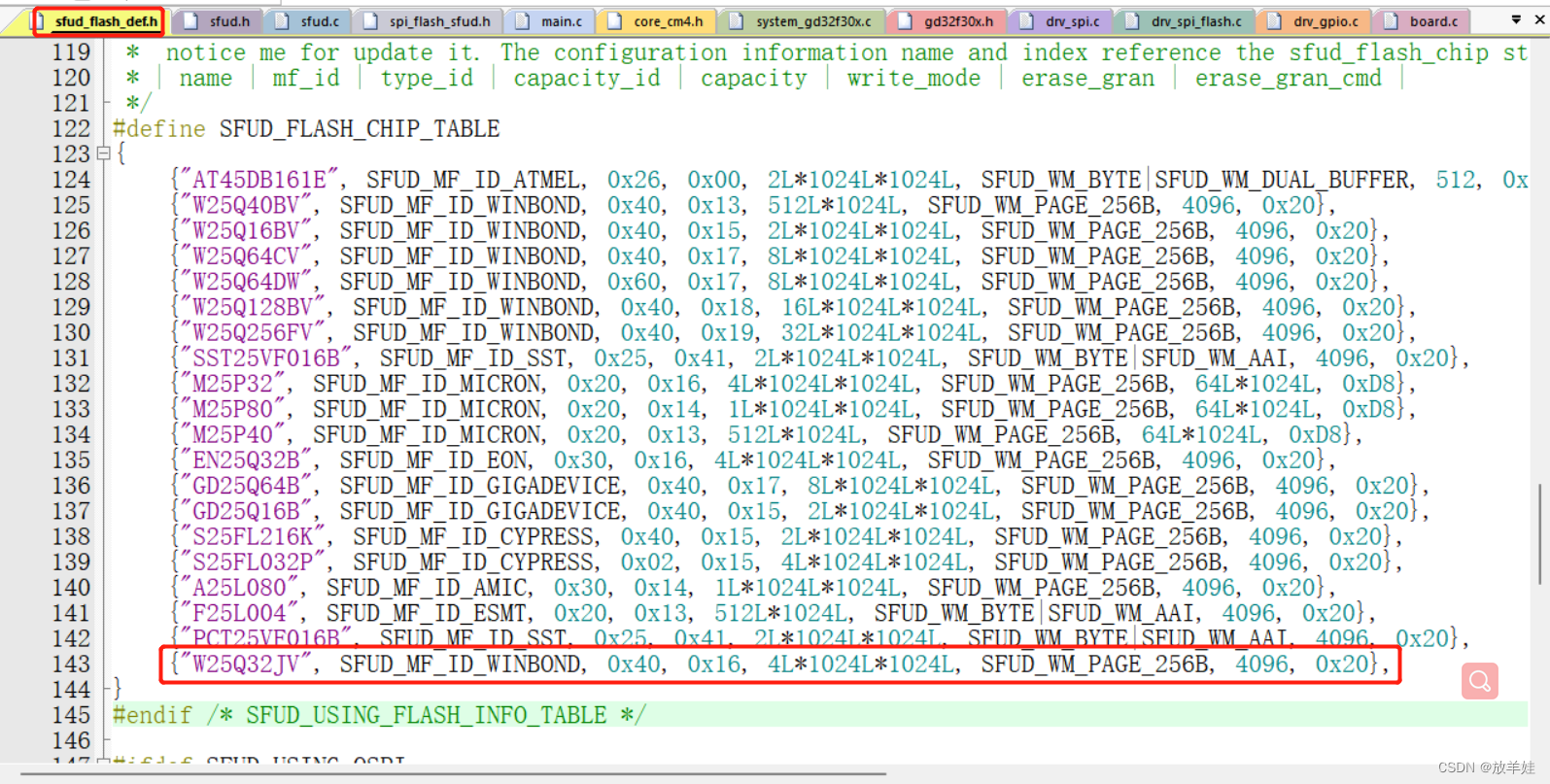
然后提示无法识别这个W25Q32芯片,查询得知,可能不支持这个芯片:
参考连接:RT-Thread记录(十六、SFUD组件 Flash读写)-电子发烧友网
关于SFUD的readme文件目录:E:rtthreadbfrt-threadcomponentsdriversspisfud
文件内容:
# SFUD (Serial Flash Universal Driver) 串行 Flash 通用驱动库
---
## 0、SFUD 是什么
[SFUD](https://github.com/armink/SFUD) 是一款开源的串行 SPI Flash 通用驱动库。由于现有市面的串行 Flash 种类居多,各个 Flash 的规格及命令存在差异, SFUD 就是为了解决这些 Flash 的差异现状而设计,让我们的产品能够支持不同品牌及规格的 Flash,提高了涉及到 Flash 功能的软件的可重用性及可扩展性,同时也可以规避 Flash 缺货或停产给产品所带来的风险。
- 主要特点:支持 SPI/QSPI 接口、面向对象(同时支持多个 Flash 对象)、可灵活裁剪、扩展性强、支持 4 字节地址
- 资源占用
- 标准占用:RAM:0.2KB ROM:5.5KB
- 最小占用:RAM:0.1KB ROM:3.6KB
- 设计思路:
- **什么是 SFDP** :它是 JEDEC (固态技术协会)制定的串行 Flash 功能的参数表标准,最新版 V1.6B ([点击这里查看](https://www.jedec.org/standards-documents/docs/jesd216b))。该标准规定了,每个 Flash 中会存在一个参数表,该表中会存放 Flash 容量、写粒度、擦除命令、地址模式等 Flash 规格参数。目前,除了部分厂家旧款 Flash 型号会不支持该标准,其他绝大多数新出厂的 Flash 均已支持 SFDP 标准。所以该库在初始化时会优先读取 SFDP 表参数。
- **不支持 SFDP 怎么办** :如果该 Flash 不支持 SFDP 标准,SFUD 会查询配置文件 ( [`/sfud/inc/sfud_flash_def.h`](https://github.com/armink/SFUD/blob/4bee2d0417a7ce853cc7aa3639b03fe825611fd9/sfud/inc/sfud_flash_def.h#L116-L142) ) 中提供的 **Flash 参数信息表** 中是否支持该款 Flash。如果不支持,则可以在配置文件中添加该款 Flash 的参数信息(添加方法详细见 [2.5 添加库目前不支持的 Flash](#25-添加库目前不支持的-flash))。获取到了 Flash 的规格参数后,就可以实现对 Flash 的全部操作。## 1、为什么选择 SFUD
- 避免项目因 Flash 缺货、Flash 停产或产品扩容而带来的风险;
- 越来越多的项目将固件存储到串行 Flash 中,例如:ESP8266 的固件、主板中的 BIOS 及其他常见电子产品中的固件等等,但是各种 Flash 规格及命令不统一。使用 SFUD 即可避免,在相同功能的软件平台基础下,无法适配不同 Flash 种类的硬件平台的问题,提高软件的可重用性;
- 简化软件流程,降低开发难度。现在只需要配置好 SPI 通信,即可畅快的开始玩串行 Flash 了;
- 可以用来制作 Flash 编程器/烧写器## 2、SFUD 如何使用
### 2.1 已支持 Flash
下表为所有已在 Demo 平台上进行过真机测试过的 Flash。显示为 **不支持** SFDP 标准的 Flash 已经在 Flash 参数信息表中定义,更多不支持 SFDP 标准的 Flash 需要大家以后 **共同来完善和维护** **([Github](https://github.com/armink/SFUD)|[OSChina](http://git.oschina.net/armink/SFUD)|[Coding](https://coding.net/u/armink/p/SFUD/git))** 。
如果觉得这个开源项目很赞,可以点击 [项目主页](https://github.com/armink/SFUD) 右上角的 **Star** ,同时把它推荐给更多有需要的朋友。
|型号|制造商|容量|最高速度|SFDP 标准|QSPI 模式|备注|
|:--:|:----:|:--:|:--:|:--:|:--:|----|
|[W25Q40BV](http://microchip.ua/esp8266/W25Q40BV(EOL).pdf)|Winbond|4Mb|50Mhz|不支持|双线|已停产|
|[W25Q80DV](http://www.winbond.com/resource-files/w25q80dv_revg_07212015.pdf)|Winbond|8Mb|104Mhz|支持|双线||
|[W25Q16BV](https://media.digikey.com/pdf/Data%20Sheets/Winbond%20PDFs/W25Q16BV.pdf)|Winbond|16Mb|104Mhz|不支持|双线| by [slipperstree](https://github.com/slipperstree)|
|[W25Q16CV](http://www.winbond.com/resource-files/da00-w25q16cvf1.pdf)|Winbond|16Mb|104Mhz|支持|未测试||
|[W25Q16DV](http://www.winbond.com/resource-files/w25q16dv%20revk%2005232016%20doc.pdf)|Winbond|16Mb|104Mhz|支持|未测试| by [slipperstree](https://github.com/slipperstree)|
|[W25Q32BV](http://www.winbond.com/resource-files/w25q32bv_revi_100413_wo_automotive.pdf)|Winbond|32Mb|104Mhz|支持|双线||
|[W25Q64CV](http://www.winbond.com/resource-files/w25q64cv_revh_052214[2].pdf)|Winbond|64Mb|80Mhz|支持|四线||
|[W25Q128BV](http://www.winbond.com/resource-files/w25q128bv_revh_100313_wo_automotive.pdf)|Winbond|128Mb|104Mhz|支持|四线||
|[W25Q256FV](http://www.winbond.com/resource-files/w25q256fv%20revi%2002262016%20kms.pdf)|Winbond|256Mb|104Mhz|支持|四线||
|[MX25L3206E](http://www.macronix.com/Lists/DataSheet/Attachments/3199/MX25L3206E,%203V,%2032Mb,%20v1.5.pdf)|Macronix|32Mb|86MHz|支持|双线||
|[KH25L4006E](http://www.macronix.com.hk/Lists/Datasheet/Attachments/117/KH25L4006E.pdf)|Macronix|4Mb|86Mhz|支持|未测试| by [JiapengLi](https://github.com/JiapengLi)|
|[KH25L3206E](http://www.macronix.com.hk/Lists/Datasheet/Attachments/131/KH25L3206E.pdf)|Macronix|32Mb|86Mhz|支持|双线||
|[SST25VF016B](http://ww1.microchip.com/downloads/en/DeviceDoc/20005044C.pdf)|Microchip|16Mb|50MHz|不支持|不支持| SST 已被 Microchip 收购|
|[M25P40](https://www.micron.com/~/media/documents/products/data-sheet/nor-flash/serial-nor/m25p/m25p40.pdf)|Micron|4Mb|75Mhz|不支持|未测试| by [redocCheng](https://github.com/redocCheng)|
|[M25P80](https://www.micron.com/~/media/documents/products/data-sheet/nor-flash/serial-nor/m25p/m25p80.pdf)|Micron|8Mb|75Mhz|不支持|未测试| by [redocCheng](https://github.com/redocCheng)|
|[M25P32](https://www.micron.com/~/media/documents/products/data-sheet/nor-flash/serial-nor/m25p/m25p32.pdf)|Micron|32Mb|75Mhz|不支持|不支持||
|[EN25Q32B](http://www.kean.com.au/oshw/WR703N/teardown/EN25Q32B%2032Mbit%20SPI%20Flash.pdf)|EON|32Mb|104MHz|不支持|未测试||
|[GD25Q16B](http://www.gigadevice.com/product/detail/5/410.html)|GigaDevice|16Mb|120Mhz|不支持|未测试| by [TanekLiang](https://github.com/TanekLiang) |
|[GD25Q64B](http://www.gigadevice.com/product/detail/5/364.html)|GigaDevice|64Mb|120Mhz|不支持|双线||
|[S25FL216K](http://www.cypress.com/file/197346/download)|Cypress|16Mb|65Mhz|不支持|双线||
|[S25FL032P](http://www.cypress.com/file/196861/download)|Cypress|32Mb|104Mhz|不支持|未测试| by [yc_911](https://gitee.com/yc_911) |
|[S25FL164K](http://www.cypress.com/file/196886/download)|Cypress|64Mb|108Mhz|支持|未测试||
|[A25L080](http://www.amictechnology.com/datasheets/A25L080.pdf)|AMIC|8Mb|100Mhz|不支持|双线||
|[A25LQ64](http://www.amictechnology.com/datasheets/A25LQ64.pdf)|AMIC|64Mb|104Mhz|支持|支持||
|[F25L004](http://www.esmt.com.tw/db/manager/upload/f25l004.pdf)|ESMT|4Mb|100Mhz|不支持|不支持||
|[PCT25VF016B](http://pctgroup.com.tw/attachments/files/files/248_25VF016B-P.pdf)|PCT|16Mb|80Mhz|不支持|不支持|SST 授权许可,会被识别为 SST25VF016B|
|[AT45DB161E](http://www.adestotech.com/wp-content/uploads/doc8782.pdf)|ADESTO|16Mb|85MHz|不支持|不支持|ADESTO 收购 Atmel 串行闪存产品线|> 注:QSPI 模式中,双线表示支持双线快读,四线表示支持四线快读。
>
> 一般情况下,支持四线快读的 FLASH 也支持两线快读。### 2.2 API 说明
先说明下本库主要使用的一个结构体 `sfud_flash` 。其定义位于 `/sfud/inc/sfud_def.h`。每个 SPI Flash 会对应一个该结构体,该结构体指针下面统称为 Flash 设备对象。初始化成功后在 `sfud_flash->chip` 结构体中会存放 SPI Flash 的常见参数。如果 SPI Flash 还支持 SFDP ,还可以通过 `sfud_flash->sfdp` 看到更加全面的参数信息。以下很多函数都将使用 Flash 设备对象作为第一个入参,实现对指定 SPI Flash 的操作。
#### 2.2.1 初始化 SFUD 库
将会调用 `sfud_device_init` ,初始化 Flash 设备表中的全部设备。如果只有一个 Flash 也可以只使用 `sfud_device_init` 进行单一初始化。
> **注意**:初始化完的 SPI Flash 默认都 **已取消写保护** 状态,如需开启写保护,请使用 sfud_write_status 函数修改 SPI Flash 状态。
```C
sfud_err sfud_init(void)
```#### 2.2.2 初始化指定的 Flash 设备
```C
sfud_err sfud_device_init(sfud_flash *flash)
```|参数 |描述|
|:----- |:----|
|flash |待初始化的 Flash 设备|#### 2.2.3 使能快速读模式(仅当 SFUD 开启 QSPI 模式后可用)
当 SFUD 开启 QSPI 模式后,SFUD 中的 Flash 驱动支持使用 QSPI 总线进行通信。相比传统的 SPI 模式,使用 QSPI 能够加速 Flash 数据的读取,但当数据需要写入时,由于 Flash 本身的数据写入速度慢于 SPI 传输速度,所以 QSPI 模式下的数据写入速度提升并不明显。
所以 SFUD 对于 QSPI 模式的支持仅限于快速读命令。通过该函数可以配置 Flash 所使用的 QSPI 总线的实际支持的数据线最大宽度,例如:1 线(默认值,即传统的 SPI 模式)、2 线、4 线。
设置后,SFUD 会去结合当前设定的 QSPI 总线数据线宽度,去 [QSPI Flash 扩展信息表](https://github.com/armink/SFUD/blob/069d2b409ec239f84d675b2c3d37894e908829e6/sfud/inc/sfud_flash_def.h#L149-L177) 中匹配最合适的、速度最快的快速读命令,之后用户在调用 sfud_read() 时,会使用 QSPI 模式的传输函数发送该命令。
```C
sfud_err sfud_qspi_fast_read_enable(sfud_flash *flash, uint8_t data_line_width)
```| 参数 | 描述 |
| :-------------- | :------------------------------------------- |
| flash | Flash 设备 |
| data_line_width | QSPI 总线支持的数据线最大宽度,例如:1、2、4 |#### 2.2.4 获取 Flash 设备对象
在 SFUD 配置文件中会定义 Flash 设备表,负责存放所有将要使用的 Flash 设备对象,所以 SFUD 支持多个 Flash 设备同时驱动。设备表的配置在 `/sfud/inc/sfud_cfg.h` 中 `SFUD_FLASH_DEVICE_TABLE` 宏定义,详细配置方法参照 [2.3 配置方法 Flash](#23-配置方法))。本方法通过 Flash 设备位于设备表中索引值来返回 Flash 设备对象,超出设备表范围返回 `NULL` 。
```C
sfud_flash *sfud_get_device(size_t index)
```|参数 |描述|
|:----- |:----|
|index |Flash 设备位于 FLash 设备表中的索引值|#### 2.2.5 读取 Flash 数据
```C
sfud_err sfud_read(const sfud_flash *flash, uint32_t addr, size_t size, uint8_t *data)
```|参数 |描述|
|:----- |:----|
|flash |Flash 设备对象|
|addr |起始地址|
|size |从起始地址开始读取数据的总大小|
|data |读取到的数据|#### 2.2.6 擦除 Flash 数据
> 注意:擦除操作将会按照 Flash 芯片的擦除粒度(详见 Flash 数据手册,一般为 block 大小。初始化完成后,可以通过 `sfud_flash->chip.erase_gran` 查看)对齐,请注意保证起始地址和擦除数据大小按照 Flash 芯片的擦除粒度对齐,否则执行擦除操作后,将会导致其他数据丢失。
```C
sfud_err sfud_erase(const sfud_flash *flash, uint32_t addr, size_t size)
```|参数 |描述|
|:----- |:----|
|flash |Flash 设备对象|
|addr |起始地址|
|size |从起始地址开始擦除数据的总大小|#### 2.2.7 擦除 Flash 全部数据
```C
sfud_err sfud_chip_erase(const sfud_flash *flash)
```|参数 |描述|
|:----- |:----|
|flash |Flash 设备对象|#### 2.2.8 往 Flash 写数据
```C
sfud_err sfud_write(const sfud_flash *flash, uint32_t addr, size_t size, const uint8_t *data)
```|参数 |描述|
|:----- |:----|
|flash |Flash 设备对象|
|addr |起始地址|
|size |从起始地址开始写入数据的总大小|
|data |待写入的数据|#### 2.2.9 先擦除再往 Flash 写数据
> 注意:擦除操作将会按照 Flash 芯片的擦除粒度(详见 Flash 数据手册,一般为 block 大小。初始化完成后,可以通过 `sfud_flash->chip.erase_gran` 查看)对齐,请注意保证起始地址和擦除数据大小按照 Flash 芯片的擦除粒度对齐,否则执行擦除操作后,将会导致其他数据丢失。
```C
sfud_err sfud_erase_write(const sfud_flash *flash, uint32_t addr, size_t size, const uint8_t *data)
```|参数 |描述|
|:----- |:----|
|flash |Flash 设备对象|
|addr |起始地址|
|size |从起始地址开始写入数据的总大小|
|data |待写入的数据|#### 2.2.10 读取 Flash 状态
```C
sfud_err sfud_read_status(const sfud_flash *flash, uint8_t *status)
```|参数 |描述|
|:----- |:----|
|flash |Flash 设备对象|
|status |当前状态寄存器值|#### 2.2.11 写(修改) Flash 状态
```C
sfud_err sfud_write_status(const sfud_flash *flash, bool is_volatile, uint8_t status)
```|参数 |描述|
|:----- |:----|
|flash |Flash 设备对象|
|is_volatile |是否为易闪失的,true: 易闪失的,及断电后会丢失|
|status |当前状态寄存器值|### 2.3 配置方法
所有配置位于 `/sfud/inc/sfud_cfg.h` ,请参考下面的配置介绍,选择适合自己项目的配置。
#### 2.3.1 调试模式
打开/关闭 `SFUD_DEBUG_MODE` 宏定义
#### 2.3.2 是否使用 SFDP 参数功能
打开/关闭 `SFUD_USING_SFDP` 宏定义
> 注意:关闭后只会查询该库在 `/sfud/inc/sfud_flash_def.h` 中提供的 Flash 信息表。这样虽然会降低软件的适配性,但减少代码量。
#### 2.3.3 是否使用该库自带的 Flash 参数信息表
打开/关闭 `SFUD_USING_FLASH_INFO_TABLE` 宏定义
> 注意:关闭后该库只驱动支持 SFDP 规范的 Flash,也会适当的降低部分代码量。另外 2.3.2 及 2.3.3 这两个宏定义至少定义一种,也可以两种方式都选择。
#### 2.3.4 既不使用 SFDP ,也不使用 Flash 参数信息表
为了进一步降低代码量,`SFUD_USING_SFDP` 与 `SFUD_USING_FLASH_INFO_TABLE` 也可以 **都不定义** 。
此时,只要在定义 Flash 设备时,指定好 Flash 参数,之后再调用 `sfud_device_init` 对该设备进行初始化。参考如下代码:
```C
sfud_flash sfud_norflash0 = {
.name = "norflash0",
.spi.name = "SPI1",
.chip = { "W25Q64FV", SFUD_MF_ID_WINBOND, 0x40, 0x17, 8L * 1024L * 1024L, SFUD_WM_PAGE_256B, 4096, 0x20 } };
......
sfud_device_init(&sfud_norflash0);
......
```#### 2.3.5 Flash 设备表
如果产品中存在多个 Flash ,可以添加 Flash 设备表。修改 `SFUD_FLASH_DEVICE_TABLE` 这个宏定义,示例如下:
```C
enum {
SFUD_W25Q64CV_DEVICE_INDEX = 0,
SFUD_GD25Q64B_DEVICE_INDEX = 1,
};#define SFUD_FLASH_DEVICE_TABLE
{
[SFUD_W25Q64CV_DEVICE_INDEX] = {.name = "W25Q64CV", .spi.name = "SPI1"},
[SFUD_GD25Q64B_DEVICE_INDEX] = {.name = "GD25Q64B", .spi.name = "SPI3"},
}
```上面定义了两个 Flash 设备(大部分产品一个足以),两个设备的名称为 `"W25Q64CV"` 及 `"GD25Q64B"` ,分别对应 `"SPI1"` 及 `"SPI3"` 这两个 SPI 设备名称(在移植 SPI 接口时会用到,位于 `/sfud/port/sfud_port.c` ), `SFUD_W25Q16CV_DEVICE_INDEX` 与 `SFUD_GD25Q64B_DEVICE_INDEX` 这两个枚举定义了两个设备位于设备表中的索引,可以通过 `sfud_get_device_table()` 方法获取到设备表,再配合这个索引值来访问指定的设备。
#### 2.3.6 QSPI 模式
打开/关闭 `SFUD_USING_QSPI` 宏定义
开启后,SFUD 也将支持使用 QSPI 总线连接的 Flash。
### 2.4 移植说明
移植文件位于 `/sfud/port/sfud_port.c` ,文件中的 `sfud_err sfud_spi_port_init(sfud_flash *flash)` 方法是库提供的移植方法,在里面完成各个设备 SPI 读写驱动(必选)、重试次数(必选)、重试接口(可选)及 SPI 锁(可选)的配置。更加详细的移植内容,可以参考 demo 中的各个平台的移植文件。
### 2.5 添加库目前不支持的 Flash
这里需要修改 `/sfud/inc/sfdu_flash_def.h` ,所有已经支持的 Flash 见 `SFUD_FLASH_CHIP_TABLE` 宏定义,需要提前准备的 Flash 参数内容分别为:| 名称 | 制造商 ID | 类型 ID | 容量 ID | 容量 | 写模式 | 擦除粒度(擦除的最小单位) | 擦除粒度对应的命令 | 。这里以添加 兆易创新 ( GigaDevice ) 的 `GD25Q64B` Flash 来举例。
此款 Flash 为兆易创新的早期生产的型号,所以不支持 SFDP 标准。首先需要下载其数据手册,找到 0x9F 命令返回的 3 种 ID, 这里需要最后面两字节 ID ,即 `type id` 及 `capacity id` 。 `GD25Q64B` 对应这两个 ID 分别为 `0x40` 及 `0x17` 。上面要求的其他 Flash 参数都可以在数据手册中找到,这里要重点说明下 **写模式** 这个参数,库本身提供的写模式共计有 4 种,详见文件顶部的 `sfud_write_mode` 枚举类型,同一款 Flash 可以同时支持多种写模式,视情况而定。对于 `GD25Q64B` 而言,其支持的写模式应该为 `SFUD_WM_PAGE_256B` ,即写 1-256 字节每页。结合上述 `GD25Q64B` 的 Flash 参数应如下:
```
{"GD25Q64B", SFUD_MF_ID_GIGADEVICE, 0x40, 0x17, 8*1024*1024, SFUD_WM_PAGE_256B, 4096, 0x20},
```再将其增加到 `SFUD_FLASH_CHIP_TABLE` 宏定义末尾,即可完成该库对 `GD25Q64B` 的支持。
### 2.6 Demo
目前已支持如下平台下的 Demo
|路径 |平台描述|
|:----- |:----|
|[/demo/stm32f10x_non_os](https://github.com/armink/SFUD/tree/master/demo/stm32f10x_non_os) |STM32F10X 裸机平台|
|[/demo/stm32f2xx_rtt](https://github.com/armink/SFUD/tree/master/demo/stm32f2xx_rtt) |STM32F2XX + [RT-Thread](http://www.rt-thread.org/) 操作系统平台|
|[/demo/stm32l475_non_os_qspi](https://github.com/armink/SFUD/tree/master/demo/stm32l475_non_os_qspi) |STM32L475 + QSPI 模式 裸机平台|### 2.7 许可
采用 MIT 开源协议,细节请阅读项目中的 LICENSE 文件内容。
这里需要修改 `/sfud/inc/sfdu_flash_def.h` ,所有已经支持的 Flash 见 `SFUD_FLASH_CHIP_TABLE` 宏定义,需要提前准备的 Flash 参数内容分别为:| 名称 | 制造商 ID | 类型 ID | 容量 ID | 容量 | 写模式 | 擦除粒度(擦除的最小单位) | 擦除粒度对应的命令 | 。这里以添加 兆易创新 ( GigaDevice ) 的 `GD25Q64B` Flash 来举例。
此款 Flash 为兆易创新的早期生产的型号,所以不支持 SFDP 标准。首先需要下载其数据手册,找到 0x9F 命令返回的 3 种 ID, 这里需要最后面两字节 ID ,即 `type id` 及 `capacity id` 。 `GD25Q64B` 对应这两个 ID 分别为 `0x40` 及 `0x17` 。上面要求的其他 Flash 参数都可以在数据手册中找到,这里要重点说明下 **写模式** 这个参数,库本身提供的写模式共计有 4 种,详见文件顶部的 `sfud_write_mode` 枚举类型,同一款 Flash 可以同时支持多种写模式,视情况而定。对于 `GD25Q64B` 而言,其支持的写模式应该为 `SFUD_WM_PAGE_256B` ,即写 1-256 字节每页。结合上述 `GD25Q64B` 的 Flash 参数应如下:
```
{"GD25Q64B", SFUD_MF_ID_GIGADEVICE, 0x40, 0x17, 8*1024*1024, SFUD_WM_PAGE_256B, 4096, 0x20},
```
再将其增加到 `SFUD_FLASH_CHIP_TABLE` 宏定义末尾,即可完成该库对 `GD25Q64B` 的支持。
这样就初始化成功了:

但是SPI flash无法mount:
参考连接:RT_thread挂载W25Q文件系统_冷月枫啊的博客-CSDN博客_将w25q抽象为块设备
需要增加代码:
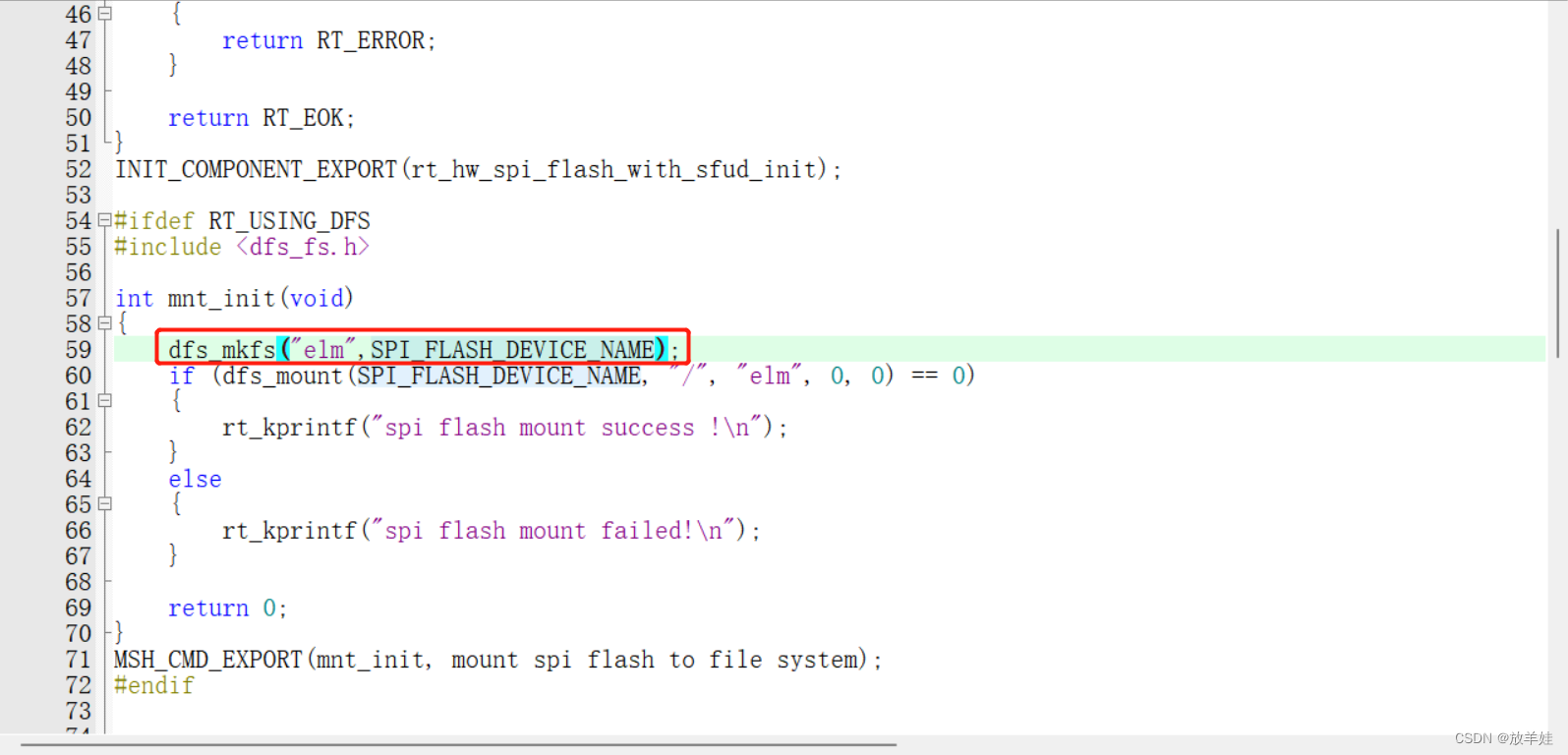
这样就可以了,代码:
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2012-01-01 aozima first implementation.
* 2018-03-30 misonyo porting to gd32f30x
*/
#include <board.h>
#include <rtthread.h>
#include <rtdevice.h>
#include "spi_flash.h"
#include "spi_flash_sfud.h"
#define SPI_BUS_NAME "spi2"
#define SPI_DEVICE_NAME "spi20"
#define SPI_FLASH_DEVICE_NAME "gd25q"
#define GD25Q_SPI_CS_PIN 110 //PE3,在 drv_gpio.c 文件 pin_index pins[]中查到 PE3 编号为 2
static int rt_hw_gd25q40_init(void)
{
rt_err_t res;
static struct rt_spi_device spi_dev_gd25q; /* SPI设备对象 */
static rt_base_t gd25q_cs_pin; /* SPI设备CS片选引脚 */
gd25q_cs_pin = GD25Q_SPI_CS_PIN;
rt_pin_mode(GD25Q_SPI_CS_PIN, GPIO_MODE_OUT_PP);
res = rt_spi_bus_attach_device(&spi_dev_gd25q, SPI_DEVICE_NAME, SPI_BUS_NAME, (void*)gd25q_cs_pin);
if (res != RT_EOK)
{
rt_kprintf("rt_spi_bus_attach_device() run failed!n");
return res;
}
return RT_EOK;
}
INIT_DEVICE_EXPORT(rt_hw_gd25q40_init);
static int rt_hw_spi_flash_with_sfud_init(void)
{
if (RT_NULL == rt_sfud_flash_probe(SPI_FLASH_DEVICE_NAME, SPI_DEVICE_NAME))
{
return RT_ERROR;
}
return RT_EOK;
}
INIT_COMPONENT_EXPORT(rt_hw_spi_flash_with_sfud_init);
#ifdef RT_USING_DFS
#include <dfs_fs.h>
int mnt_init(void)
{
dfs_mkfs("elm",SPI_FLASH_DEVICE_NAME);
if (dfs_mount(SPI_FLASH_DEVICE_NAME, "/", "elm", 0, 0) == 0)
{
rt_kprintf("spi flash mount success !n");
}
else
{
rt_kprintf("spi flash mount failed!n");
}
return 0;
}
MSH_CMD_EXPORT(mnt_init, mount spi flash to file system);
#endif
/*
* 程序清单:这是一个 SPI 设备使用例程
* 例程导出了 spi_w25q_sample 命令到控制终端
* 命令调用格式:spi_w25q_sample spi10
* 命令解释:命令第二个参数是要使用的SPI设备名称,为空则使用默认的SPI设备
* 程序功能:通过SPI设备读取 w25q 的 ID 数据
*/
#include <rtthread.h>
#include <rtdevice.h>
#define W25Q_SPI_DEVICE_NAME "qspi10"
static void spi_w25q_sample(int argc, char *argv[])
{
struct rt_spi_device *spi_dev_w25q;
char name[RT_NAME_MAX];
rt_uint8_t w25x_read_id = 0x90;
rt_uint8_t id[5] = {0};
if (argc == 2)
{
rt_strncpy(name, argv[1], RT_NAME_MAX);
}
else
{
rt_strncpy(name, W25Q_SPI_DEVICE_NAME, RT_NAME_MAX);
}
/* 查找 spi 设备获取设备句柄 */
spi_dev_w25q = (struct rt_spi_device *)rt_device_find(name);
if (!spi_dev_w25q)
{
rt_kprintf("spi sample run failed! can't find %s device!n", name);
}
else
{
// { /* 配置SPI*/
// struct rt_spi_configuration cfg;
// cfg.data_width = 8;
// cfg.mode = RT_SPI_MASTER | RT_SPI_MODE_3 | RT_SPI_MSB;
// cfg.max_hz = 5 * 1000 *1000; /* 20M */
// rt_spi_configure(spi_dev_w25q, &cfg);
// }
/* 方式1:使用 rt_spi_send_then_recv()发送命令读取ID */
rt_spi_send_then_recv(spi_dev_w25q, &w25x_read_id, 1, id, 5);
rt_kprintf("use rt_spi_send_then_recv() read w25q ID is:%x%xn", id[3], id[4]);
/* 方式2:使用 rt_spi_transfer_message()发送命令读取ID */
struct rt_spi_message msg1, msg2;
msg1.send_buf = &w25x_read_id;
msg1.recv_buf = RT_NULL;
msg1.length = 1;
msg1.cs_take = 1;
msg1.cs_release = 0;
msg1.next = &msg2;
msg2.send_buf = RT_NULL;
msg2.recv_buf = id;
msg2.length = 5;
msg2.cs_take = 0;
msg2.cs_release = 1;
msg2.next = RT_NULL;
rt_spi_transfer_message(spi_dev_w25q, &msg1);
rt_kprintf("use rt_spi_transfer_message() read w25q ID is:%x%xn", id[3], id[4]);
}
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(spi_w25q_sample, spi w25q sample);
最后
以上就是潇洒小兔子最近收集整理的关于rt-thread通过spi连接W25Q32后无法读取ID的全部内容,更多相关rt-thread通过spi连接W25Q32后无法读取ID内容请搜索靠谱客的其他文章。








发表评论 取消回复