主要内容:
以太网调试问题中gmii to rgmii问题较多:
主要涉及到IP 参数配置、Linux设备树等
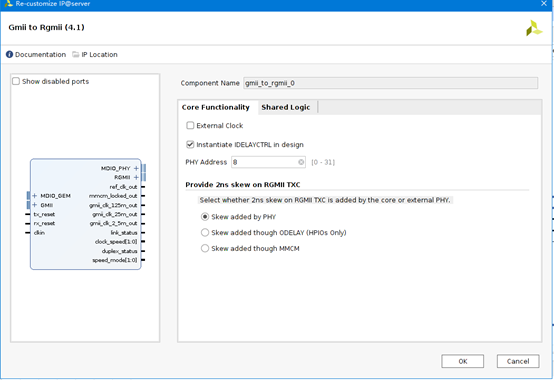
Vivado关键配置:
- PHY Address 默认8,这里不是填写phy地址,一定要和phy地址不一样才能工作,这里用于虚拟一个phy设置,用于配置gmii to rgmii的工作速率,地址是0x10
- Provide 2ns skew on RGMII TXC,这个参数就是要不要把TXC延时2ns,这个选Skew added by
PHY,就是用phy芯片来延时。
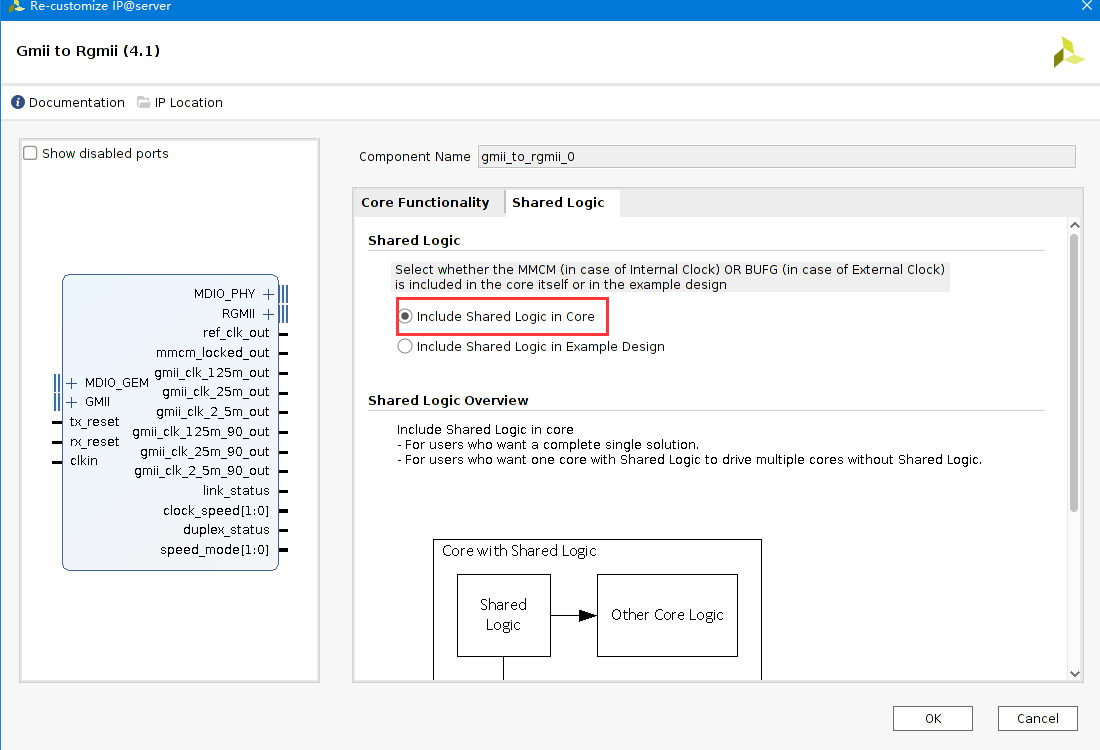
- Shared Logic 页面里,一般选“Inclue Shared Logic in Core”,PL端设计,这里适用于一路GMII
to RGMII,如果有多路可能要另行处理
- 复位:gmii_to_rgmii tx_reset和rx_reset复位通过一个反相器连接到PS的复位,因为这个复位时高电平复位,phy芯片本身复位可以直接连接到PS复位
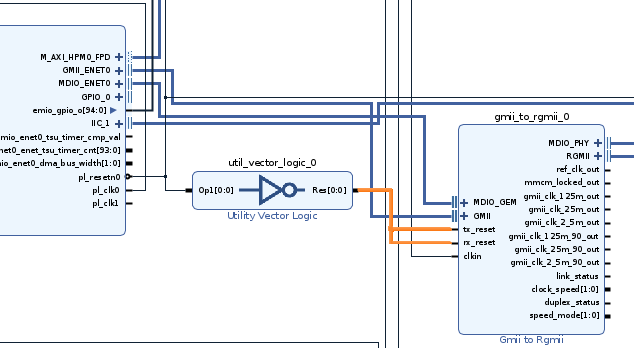
- 时钟:gmii_to_rgmii的clkin输入要特别注意,zynq系列输入时200Mhz时钟,zynqmp系列用375Mhz
调试
Vivado核对无误后编译调试,由于Linux下遇到问题调试比较麻烦,笔者一般先在裸机下把接口调通。
裸机lwip调试
默认的lwip只支持TI、Marvell的2款phy,新版可能还支持Realtek的,也就是说支持的phy非常少,笔者项目中用到ksz9031就不支持,需要自己修改代码xemacpsif_physpeed.c
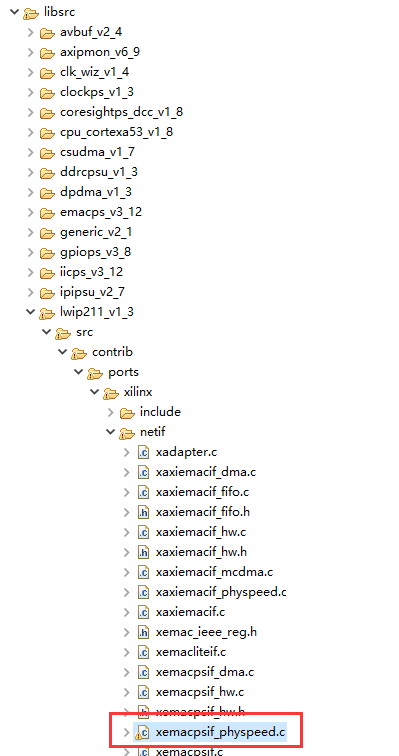
主要修改点在函数get_IEEE_phy_speed中,get_IEEE_phy_speed主要是获取phy的协商状况,需要自己根据具体的phy添加相应的函数,例如:get_phy_speed_ksz9031
static u32_t get_IEEE_phy_speed(XEmacPs *xemacpsp, u32_t phy_addr)
{
u16_t phy_identity;
u32_t RetStatus;
XEmacPs_PhyRead(xemacpsp, phy_addr, PHY_IDENTIFIER_1_REG,
&phy_identity);
if(phy_identity == MICREL_PHY_IDENTIFIER){
RetStatus = get_phy_speed_ksz9031(xemacpsp, phy_addr);
} else if (phy_identity == PHY_TI_IDENTIFIER) {
RetStatus = get_TI_phy_speed(xemacpsp, phy_addr);
} else if (phy_identity == PHY_REALTEK_IDENTIFIER) {
RetStatus = get_Realtek_phy_speed(xemacpsp, phy_addr);
} else {
RetStatus = get_Marvell_phy_speed(xemacpsp, phy_addr);
}
return RetStatus;
}
get_phy_speed_ksz9031具体实现
static u32_t get_phy_speed_ksz9031(XEmacPs *xemacpsp, u32_t phy_addr)
{
u16_t temp;
u16_t control;
u16_t status;
u16_t status_speed;
u32_t timeout_counter = 0;
u32_t temp_speed;
u32_t phyregtemp;
xil_printf("Start PHY autonegotiation rn");
XEmacPs_PhyWrite(xemacpsp,phy_addr, IEEE_PAGE_ADDRESS_REGISTER, 2);
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_CONTROL_REG_MAC, &control);
control |= IEEE_RGMII_TXRX_CLOCK_DELAYED_MASK;
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_CONTROL_REG_MAC, control);
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_PAGE_ADDRESS_REGISTER, 0);
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_AUTONEGO_ADVERTISE_REG, &control);
control |= IEEE_ASYMMETRIC_PAUSE_MASK;
control |= IEEE_PAUSE_MASK;
control |= ADVERTISE_100;
control |= ADVERTISE_10;
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_AUTONEGO_ADVERTISE_REG, control);
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_1000_ADVERTISE_REG_OFFSET,
&control);
control |= ADVERTISE_1000;
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_1000_ADVERTISE_REG_OFFSET,
control);
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_PAGE_ADDRESS_REGISTER, 0);
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_COPPER_SPECIFIC_CONTROL_REG,
&control);
control |= (7 << 12); /* max number of gigabit attempts */
control |= (1 << 11); /* enable downshift */
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_COPPER_SPECIFIC_CONTROL_REG,
control);
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_CONTROL_REG_OFFSET, &control);
control |= IEEE_CTRL_AUTONEGOTIATE_ENABLE;
control |= IEEE_STAT_AUTONEGOTIATE_RESTART;
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_CONTROL_REG_OFFSET, control);
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_CONTROL_REG_OFFSET, &control);
control |= IEEE_CTRL_RESET_MASK;
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_CONTROL_REG_OFFSET, control);
while (1) {
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_CONTROL_REG_OFFSET, &control);
if (control & IEEE_CTRL_RESET_MASK)
continue;
else
break;
}
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_STATUS_REG_OFFSET, &status);
xil_printf("Waiting for PHY to complete autonegotiation.rn");
while ( !(status & IEEE_STAT_AUTONEGOTIATE_COMPLETE) ) {
sleep(1);
XEmacPs_PhyRead(xemacpsp, phy_addr,
IEEE_COPPER_SPECIFIC_STATUS_REG_2, &temp);
timeout_counter++;
if (timeout_counter == 30) {
xil_printf("Auto negotiation error rn");
return;
}
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_STATUS_REG_OFFSET, &status);
}
xil_printf("autonegotiation complete rn");
XEmacPs_PhyRead(xemacpsp, phy_addr,0x1f,
&status_speed);
if ( (status_speed & 0x40) == 0x40)/* 1000Mbps */
return 1000;
else if ( (status_speed & 0x20) == 0x20)/* 100Mbps */
return 100;
else if ( (status_speed & 0x10) == 0x10)/* 10Mbps */
return 10;
else
return 0;
return XST_SUCCESS;
}
最重要一点:在phy_setup_emacps函数里定义了gmii to rgmii的相关操作,但是默认没有开启,需要定义宏定义 XPAR_GMII2RGMIICON_0N_ETH0_ADDR 或 XPAR_GMII2RGMIICON_0N_ETH1_ADDR,这2个宏定义就是ETH0 或 ETH1 使用GMII2RGMII,然后根据vivado里的地址定义宏定义,例如#define XPAR_GMII2RGMIICON_0N_ETH0_ADDR 8
#define XPAR_GMII2RGMIICON_0N_ETH0_ADDR 8
u32_t phy_setup_emacps (XEmacPs *xemacpsp, u32_t phy_addr)
{
u32_t link_speed;
u32_t conv_present = 0;
u32_t convspeeddupsetting = 0;
u32_t convphyaddr = 0;
#ifdef XPAR_GMII2RGMIICON_0N_ETH0_ADDR
convphyaddr = XPAR_GMII2RGMIICON_0N_ETH0_ADDR;
conv_present = 1;
#endif
#ifdef XPAR_GMII2RGMIICON_0N_ETH1_ADDR
convphyaddr = XPAR_GMII2RGMIICON_0N_ETH1_ADDR;
conv_present = 1;
#endif
#ifdef CONFIG_LINKSPEED_AUTODETECT
link_speed = get_IEEE_phy_speed(xemacpsp, phy_addr);
if (link_speed == 1000) {
SetUpSLCRDivisors(xemacpsp->Config.BaseAddress,1000);
convspeeddupsetting = XEMACPS_GMII2RGMII_SPEED1000_FD;
} else if (link_speed == 100) {
SetUpSLCRDivisors(xemacpsp->Config.BaseAddress,100);
convspeeddupsetting = XEMACPS_GMII2RGMII_SPEED100_FD;
} else if (link_speed != XST_FAILURE){
SetUpSLCRDivisors(xemacpsp->Config.BaseAddress,10);
convspeeddupsetting = XEMACPS_GMII2RGMII_SPEED10_FD;
} else {
xil_printf("Phy setup error rn");
return XST_FAILURE;
}
#elif defined(CONFIG_LINKSPEED1000)
SetUpSLCRDivisors(xemacpsp->Config.BaseAddress,1000);
link_speed = 1000;
configure_IEEE_phy_speed(xemacpsp, phy_addr, link_speed);
convspeeddupsetting = XEMACPS_GMII2RGMII_SPEED1000_FD;
sleep(1);
#elif defined(CONFIG_LINKSPEED100)
SetUpSLCRDivisors(xemacpsp->Config.BaseAddress,100);
link_speed = 100;
configure_IEEE_phy_speed(xemacpsp, phy_addr, link_speed);
convspeeddupsetting = XEMACPS_GMII2RGMII_SPEED100_FD;
sleep(1);
#elif defined(CONFIG_LINKSPEED10)
SetUpSLCRDivisors(xemacpsp->Config.BaseAddress,10);
link_speed = 10;
configure_IEEE_phy_speed(xemacpsp, phy_addr, link_speed);
convspeeddupsetting = XEMACPS_GMII2RGMII_SPEED10_FD;
sleep(1);
#endif
if (conv_present) {
XEmacPs_PhyWrite(xemacpsp, convphyaddr,
XEMACPS_GMII2RGMII_REG_NUM, convspeeddupsetting);
}
xil_printf("link speed for phy address %d: %drn", phy_addr, link_speed);
return link_speed;
}
Linux下调试
Linux主要使用Xilinx的petalinux,petalinux会自动根据vivado导出的hdf或xsa文件生成设备树和一些Linux配置文件,非常方便,简单几步就可以完成Linux系统的定制。
首先配置GMII2RGMII驱动
文本方式就是:
CONFIG_XILINX_GMII2RGMII=y
还需要设备树,修改的设备树文件是project-specmeta-userrecipes-bspdevice-treefilessystem-user.dtsi
&gem1 {
gmii2rgmii-phy-handle = <&gmii_to_rgmii_0>;
phy-handle = <&phy1>;
ps7_ethernet_1_mdio: mdio {
#address-cells = <1>;
#size-cells = <0>;
phy1: phy@1 {
device_type = "ethernet-phy";
};
gmii_to_rgmii_0: phy@8 {
compatible = "xlnx,gmii-to-rgmii-1.0";
device_type = "ethernet-phy";
reg = <8>;
phy-handle = <&phy1>;
};
};
};
修改完成就可以了,但是打印信息会提示找不到时钟,这个没有影响
注意问题:
由于每个版本的Linux驱动稍微有差异,导致有些版本能工作,有些版本不能工作,每个版本都需要细微调整一下。任何细节都可能导致不成功,如果你在使用过程中遇到问题,欢迎交流!
最后
以上就是彪壮秀发最近收集整理的关于zynq或zynqmp通过emio和gmii to rgmii ip使用pl端以太网调试主要内容:Vivado关键配置:调试注意问题:的全部内容,更多相关zynq或zynqmp通过emio和gmii内容请搜索靠谱客的其他文章。








发表评论 取消回复