下来会通过示例来描述不同Service Type值的应用场景。在此之前,强烈建议先阅读前后台进程父子关系和daemon类进程来搞懂进程之间的关系和Daemon类进程的特性。
systemd service:Type=forking
当使用systemd去管理一个长久运行的服务进程时,最常用的Type是forking类型。
使用Type=forking时,要求ExecStart启动的命令自身就是以daemon模式运行的。而以daemon模式运行的进程都有一个特性:总是会有一个瞬间退出的中间父进程,如果不了解这点特性,请看前后台进程父子关系和daemon类进程。
例如,nginx命令默认以daemon模式运行,所以可直接将其配置为forking类型:
$ cat test.service
[Unit]
Description = Test
[Service]
Type = forking
ExecStart = /usr/sbin/nginx
$ systemctl daemon-reload
$ systemctl start test
$ systemctl status test
● test.service - Test
Loaded: loaded
Active: active (running)
Process: 7912 ExecStart=/usr/sbin/nginx (code=exited, status=0/SUCCESS)
Main PID: 7913 (nginx)
Tasks: 5
Memory: 4.6M
CGroup: /system.slice/test.service
├─7913 nginx: master process /usr/sbin/nginx
├─7914 nginx: worker process
├─7915 nginx: worker process
├─7916 nginx: worker process
└─7917 nginx: worker process
注意上面status报告的信息中,ExecStart启动的nginx的进程PID=7912,且该进程的状态是已退出,退出状态码为0,这个进程是daemon类进程创建过程中瞬间退出的中间父进程。在forking类型中,该进程称为初始化进程。同时还有一行Main PID: 7913 (nginx),这是systemd真正监控的nginx服务主进程,其PID=7913,是PID=7912进程的子进程。
Type=forking类型代表什么呢?要解释清楚该type,需从进程创建开始说起。

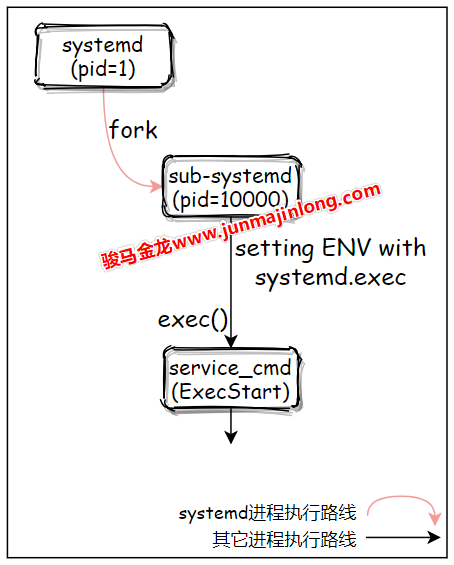
对于Type=forking来说,pid=1的systemd进程fork出来的子进程正是瞬间退出的中间父进程,且systemd会在中间父进程退出后就认为服务启动成功,此时systemd可以立即去启动后续需要启动的服务。
如果Type=forking服务中的启动命令是一个前台命令会如何呢?比如将sleep配置为forking模式,将nginx daemon off配置为forking模式等。
答案是systemd会一直等待中间ExecStart启动的进程作为中间父进程退出,在等待过程中,systemctl start会一直卡住,直到等待超时而失败,在此阶段中,systemctl status将会查看到服务处于activating状态。
$ cat test.service
[Unit]
Description = Test
[Service]
Type = forking
ExecStart = /usr/sbin/nginx -g 'daemon off;'
$ systemctl daemon-reload
$ systemctl start test # 卡住
$ systemctl status test # 另一个窗口查看
● test.service - Test
Loaded: loaded
Active: activating (start)
Control: 9227 (nginx)
Tasks: 1
Memory: 2.0M
CGroup: /system.slice/test.service
└─9227 /usr/sbin/nginx -g daemon off;
回到forking类型的服务。由于daemon类的进程会有一个瞬间退出的中间父进程(如上面PID=7913的nginx进程),systemd是如何知道哪个进程是应该被监控的服务主进程(Main PID)呢?
答案是靠猜。没错,systemd真的就是靠猜的。当设置Type=forking时,有一个GuessMainPID指令其默认值为yes,它表示systemd会通过一些算法去猜测Main PID。当systemd的猜测无法确定哪个为主进程时,后果是严重的:systemd将不可靠。因为systemd无法正确探测服务是否真的失败,当systemd误认为服务失败时,如果本服务配置了自动重启(配置了Restart指令),重启服务时可能会和当前正在运行但是systemd误认为失败的服务冲突(比如出现端口已被占用问题)。
多数情况下的猜测过程很简单,systemd只需去找目前存活的属于本服务的leader进程即可。但有些服务(少数)情况可能比较复杂,在多进程之间做简单的猜测并非总是可靠。
好在,Type=forking时的systemd提供了PIDFile指令(Type=forking通常都会结合PIDFile指令),systemd会从PIDFile指令所指定的PID文件中获取服务的主进程PID。
例如,编写一个nginx的服务配置文件:
$ cat test.service
[Unit]
Description = Test
[Service]
Type = forking
PIDFile = /run/nginx.pid
ExecStartPre = /usr/bin/rm -f /run/nginx.pid
ExecStart = /usr/sbin/nginx
ExecStartPost = /usr/bin/sleep 0.1
Type=forking时PIDFile指令的坑
关于PIDFile,有必要去了解一些注意事项,否则它们可能就会成为你的坑。
首先,PIDFile只适合在Type=forking模式下使用,其它时候没必要使用,因为其它类型的Service主进程的PID都是确定的。systemd推荐PIDFile指定的PID文件在/run目录下,所以,可能需要修改服务程序的配置文件,将其PID文件路径修改为/run目录之下,当然这并非必须。
但有一点必须注意,PIDFile指令的值要和服务程序的PID文件路径保持一致。
例如nginx的相关配置:
$ grep -i 'pid' /etc/nginx/nginx.conf
pid /run/nginx.pid;
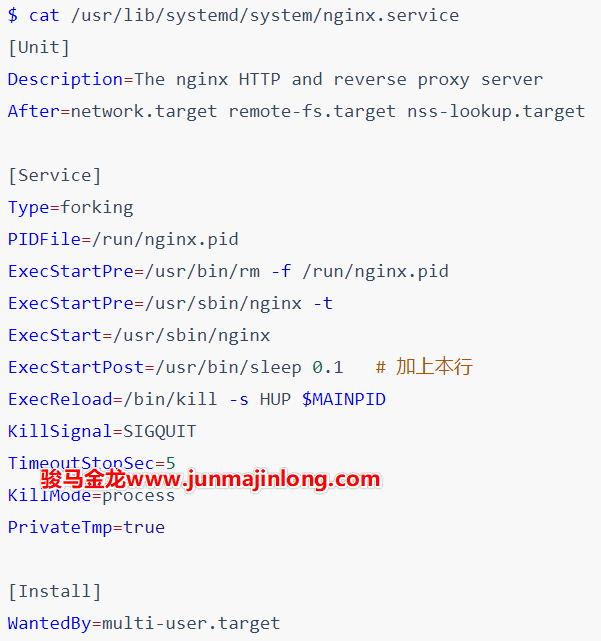
$ cat /usr/lib/systemd/system/nginx.service
[Unit]
Description=The nginx HTTP and reverse proxy server
After=network.target remote-fs.target nss-lookup.target
[Service]
Type=forking
PIDFile=/run/nginx.pid # 路径和nginx.conf中保持一致
ExecStartPre=/usr/bin/rm -f /run/nginx.pid
ExecStartPre=/usr/sbin/nginx -t
ExecStart=/usr/sbin/nginx
ExecReload=/bin/kill -s HUP $MAINPID
KillSignal=SIGQUIT
TimeoutStopSec=5
KillMode=process
PrivateTmp=true
[Install]
WantedBy=multi-user.target
其次,systemd会在中间父进程退出后立即读取这个PID文件,读取成功后就认为该服务已经启动成功。但是,systemd读取PIDFile的时候,服务主进程可能还未将PID写入到PID文件中,这时systemd将出现问题。所以,对于服务程序的开发人员来说,应尽早将主进程写入到PID文件中,比如可以在中间父进程fork完之后立即写入PID文件,然后再退出,而不是在fork出来的服务主进程内部由主进程负责写入。
上面的nginx服务配置文件是某个nginx版本yum包提供的,但却是有问题的,我曾经踩过这个坑,网上甚至将其报告为一个Bug。
上面的nginx.service文件可以正常启动服务,但无法systemctl reload,只要reload就报错,而且报错时提示kill命令语法错误。kill语法错误显然是因为没有获取到$MAINPID变量的值,而这正是因为systemd在nginx写入PID文件之前先去读取了PID文件,因为没有读取到内容,所以$MAINPID变量为空值。
解决办法是使用ExecStartPost=/usr/bin/sleep 0.1,让systemd在初始化进程(即中间父进程)退出之后耽搁0.1秒再继续向下执行,即推迟了systemd读取PID的过程,保证能让systemd从PID文件中读取到值。
最后,systemd只会读PIDFile文件而不会写,也不会创建它。但是,在停止服务的时候,systemd会尝试删除PID文件。因为服务进程可能会异常终止,导致已终止的服务进程的PID文件仍然保留着,所以在使用PIDFile指令时,通常还会使用ExecStartPre指令来删除可能已经存在的PID文件。正如上面给出的nginx配置文件一样。
systemd service:Type=simple
Type=simple是一种最常见的通过systemd服务系统运行用户自定义命令的类型,也是省略Type指令时的默认类型。
Type=simple类型的服务只适合那些在shell下运行在前台的命令。也就是说,当一个命令本身会以daemon模式运行时,将不能使用simple,而应该使用Type=forking。比如ls命令、sleep命令、非daemon模式运行的nginx进程以及那些以前台调试模式运行的进程,在理论上都可以定义为simple类型的服务。至于为何有如此规则,稍后会解释的明明白白。
例如,编写一个/usr/lib/systemd/system/test.service运行sleep进程:
[Unit]
Description = test
[Service]
Type = simple
ExecStart = /usr/bin/sleep 10 # 命令必须使用绝对路径
使用daemon-reload重载并启动该服务进程:
$ systemctl daemon-reload
$ systemctl start test
$ systemctl status test
● test.service - Test
Loaded: loaded
Active: active (running)
Main PID: 6902 (sleep)
Tasks: 1
Memory: 96.0K
CGroup: /system.slice/test.service
└─6902 /usr/bin/sleep 10
10秒内,sleep进程以daemon模式运行在后台,就像一个服务进程一样。10秒之后,sleep退出,于是systemd将该进程从监控队列中踢出。再次查看进程的状态将是inactive:
$ systemctl status test
● test.service - Test
Loaded: loaded
Active: inactive (dead)
再来分析上面的服务配置文件中的指令。
ExecStart指令指定启动本服务时执行的命令,即启动一个本该前台运行的sleep进程作为服务进程在后台运行。
需注意,systemd service的命令行中必须使用绝对路径,且只能编写单条命令(Type=oneshot时除外),如果要命令续行,可在尾部使用反斜线符号等。
此外,命令行中支持部分类似Shell的特殊符号,但不支持重定向> >> << <、管道|、后台符号&,具体可参考man systemd.service中command line段落的解释说明。
对于Type=simple来说,systemd系统在fork出子systemd进程后就认为服务已经启动完成了,所以systemd可以紧跟着启动排在该服务之后启动的服务。它的伪代码模型大概是这样的:
# pid = 1: systemd
# start service1 with Type=simple
pid=fork()
if(pid=0){
# Child Process: sub systemd process
exec(<Service_Cmd>)
}
# start other services after service1
...
例如,先后连续启动两个Type=simple的服务,进程流程图大概如下:
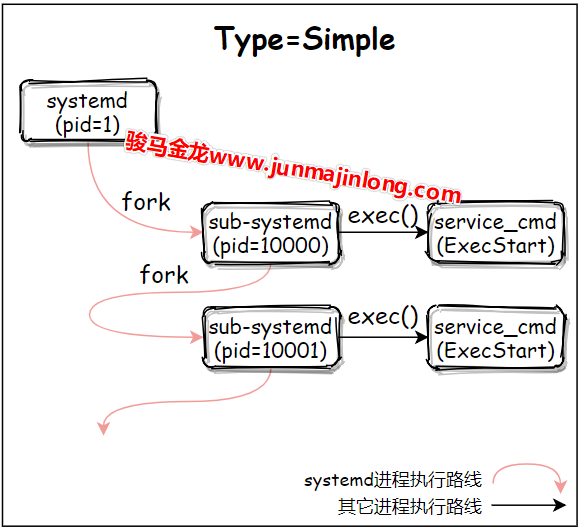
换句话说,当Type=simple时,systemd只在乎fork阶段是否成功,只要fork子进程成功,这个子进程就受systemd监管,systemd就认为该Unit已经启动。
因为子进程已成功被systemd监控,无论子进程是否启动成功,在子进程退出时,systemd都会将其从监控队列中踢掉,同时杀掉所有附属进程(默认行为是如此,杀进程的方式由systemd.kill中的KillMode指令控制)。所以,查看服务的状态将是inactive(dead)。
例如,下面的配置种,睡眠1秒后,该服务的状态将变为inactive(dead)。
Code
1
2
[Service]
ExecStart = /usr/bin/sleep 1
这没什么疑问。但考虑一下,如果simple类型下ExecStart启动的命令本身就是以daemon模式运行的呢?其结果是systemd默认会立刻杀掉所有属于服务的进程。
原因也很简单,daemon类进程总是会有一个瞬间退出的中间父进程,而在simple类型下,systemd所fork出来的子进程正是这个中间父进程,所以systemd会立即发现这个中间父进程的退出,于是杀掉其它所有服务进程。
例如,以运行bash -c '(sleep 3000 &)'的simple类型的服务,被systemd监控的bash进程会在启动sleep后立即退出,于是systemd会立即杀掉属于该服务的sleep进程。
$ cat test.service
[Unit]
Description = Test
[Service]
ExecStart = bash -c '( sleep 3000 & )'
$ systemctl daemon-reload
$ systemctl start test
$ systemctl status test
● test.service - Test
Loaded: loaded
Active: inactive (dead)
再例如,nginx命令默认是以daemon模式运行的,simple类型下直接使用nginx命令启动服务,systemd会立刻杀掉所有nginx,即nginx无法启动成功。
$ cat test.service
[Unit]
Description = Test
[Service]
ExecStart = /usr/sbin/nginx
$ systemctl daemon-reload
$ systemctl start test
$ systemctl status test
● test.service - Test
Loaded: loaded
Active: inactive (dead)
但如果将nginx进程以非daemon模式运行,simple类型的nginx服务将正常启动:
$ cat test.service
[Unit]
Description = Test
[Service]
ExecStart = /usr/sbin/nginx -g 'daemon off;'
$ systemctl daemon-reload
$ systemctl start test
$ systemctl status test
● test.service - Test
Loaded: loaded
Active: active (running)
Main PID: 7607 (nginx)
Tasks: 5
Memory: 4.6M
CGroup: /system.slice/test.service
├─7607 nginx: master process /usr/sbin/nginx -g daemon off;
├─7608 nginx: worker process
├─7609 nginx: worker process
├─7610 nginx: worker process
└─7611 nginx: worker process
Systemd Service:其它Type类型
除了simple和forking类型,还有exec、oneshot、idle、notify和dbus类型,这里不考虑notify和dbus,剩下的exec、oneshot和idle都类似于simple类型。
- simple:在fork出子systemd进程后,systemd就认为该服务启动成功了
- exec:在fork出子systemd进程且子systemd进程exec()调用ExecStart命令成功后,systemd认为该服务启动成功
- oneshot:在ExecStart命令执行完成退出后,systemd才认为该服务启动成功
- 因为服务进程退出后systemd才继续工作,所以在未配置RemainAfterExit指令时,oneshot类型的服务永远无法出现active状态,它直接从启动状态到activating到deactivating再到dead状态
- 当结合RemainAfterExit指令时,在服务进程退出后,systemd会继续监控该Unit,所以服务的状态为active(exited),通过这个状态可以让用户知道,该服务曾经已经运行成功,而不是从未运行过
- 通常来说,对于那些执行单次但无需长久运行的进程来说,可以采用type=oneshot,比如启动iptables,挂载文件系统的操作、关机或重启的服务等
- idle:无需考虑这种类型
模板型服务配置文件
systemd service支持简单的模板型Unit配置文件,在Unit配置文件中可以使用%n %N %p %i…等特殊符号进行占位,在systemd读取配置文件时会将这些特殊符号解析并替换成对应的值。
这些特殊符号的含义可参见man systemd.unit。通常情况下只会使用到%i或%I,其它特殊符号用到的机会较少。
使用%i %I这两个特殊符号时,要求Unit的文件名以@为后缀,即文件名格式为Service_Name@.service。当使用systemctl管理这类服务时,@符号后面的字符会传递到Unit模板文件中的%i或%I。
例如,执行下面这些命令时,会使用abc替换service_name@.service文件中的%i或%I。
systemctl start service_name@abc
systemctl status service_name@abc
systemctl stop service_name@abc
systemctl enable service_name@abc
systemctl disable service_name@abc
有时候这是很实用的。比如有些程序即是服务端程序又是客户端程序,区分客户端和服务端的方式是使用不同配置文件。
假设用户想在一个机器上同时运行xyz程序的服务端和客户端,可编写如下Unit服务配置文件:
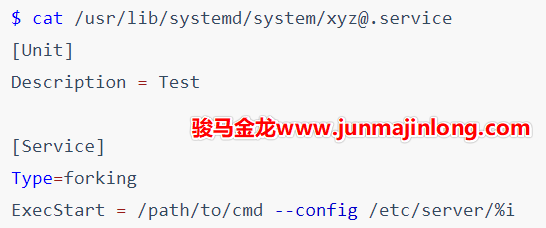
现在用户可以在/etc/server目录下同时提供服务程序的服务端配置文件和客户端配置文件。
/etc/server/server.conf
/etc/server/client.conf
如果要管理该主机上的服务端:
systemctl start xyz@server
systemctl status xyz@server
systemctl stop xyz@server
systemctl enable xyz@server
systemctl disable xyz@server
如果要管理该主机上的客户端:
systemctl start xyz@client
systemctl status xyz@client
systemctl stop xyz@client
systemctl enable xyz@client
systemctl disable xyz@client
使用target组合多个服务
有些时候,一个大型服务可能由多个小服务组成。
比如c服务由a.service和b.service组成,因为组合了两个服务,所以c服务可以定义为c.target。
a.service内容:
[Unit]
Description = a.service
PartOf = c.target
Before = c.target
[Install]
ExecStart = /path/to/a.cmd
b.service内容:
[Unit]
Description = b.service
PartOf = c.target
Before = c.target
[Install]
ExecStart = /path/to/b.cmd
c.target内容:
[Unit]
Description = c.service, consists of a.service and b.service
After = a.service b.service
Wants = a.service b.service
c中配置Wants表示a和b先启动,但启动失败不会影响c的启动。如果要求c.target和a.service、b.service的启动状态一致,可将Wants替换成Requires或BindsTo指令。
PartOf指令表明a.service和b.service是c.target的一部分,停止或重启c.target的同时,也会停止或重启a和b。再加上c.target中配置了Wants指令(也可以改成Requires或BindsTo),使得启动c的时候,a和b也已经启动完成。
但是要注意,PartOf是单向的,停止和重启a或b的时候不会影响c。
https://www.junmajinlong.com/linux/systemd/service_2/
最后
以上就是无限灰狼最近收集整理的关于systemd教程(三)的全部内容,更多相关systemd教程(三)内容请搜索靠谱客的其他文章。








发表评论 取消回复