文章目录
- 写在前面
- 论文解读
- vins-mono 概述
- 1. Measurement Preprocessing 过程
- 2. Estimator Initialization 过程
- 3. Tightly Computed Monocular VIO
- 代码解读
- 各文件夹功能解读
- 从CMakeLists.txt分析
- vins_estimator
- 从多线程角度分析
- 功能类的问题
- 附录:
- 参数/变量 名称
- class 名称
- FeatureTracker 特征点追踪类
- CameraFactory 不同的相机类型和校准模型
- TicToc 计算时间差的功能类
- Estimator
写在前面
VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator 的设计思路主要突出两点:
- 针对于单目的鲁棒性很强的VIO 系统
- 通用性很强的VIO框架
从论文和工程的设计思路无不体现着这两点,从考虑周密的初始化过程,到球面相机模型的引入等等都有体现,至于中间的Keyframe、Sliding Windows 以及4-DoF Pose Graph Optimization都是为了既保证优化的性能,也兼顾系统的实时性所做的一些考量。
论文解读
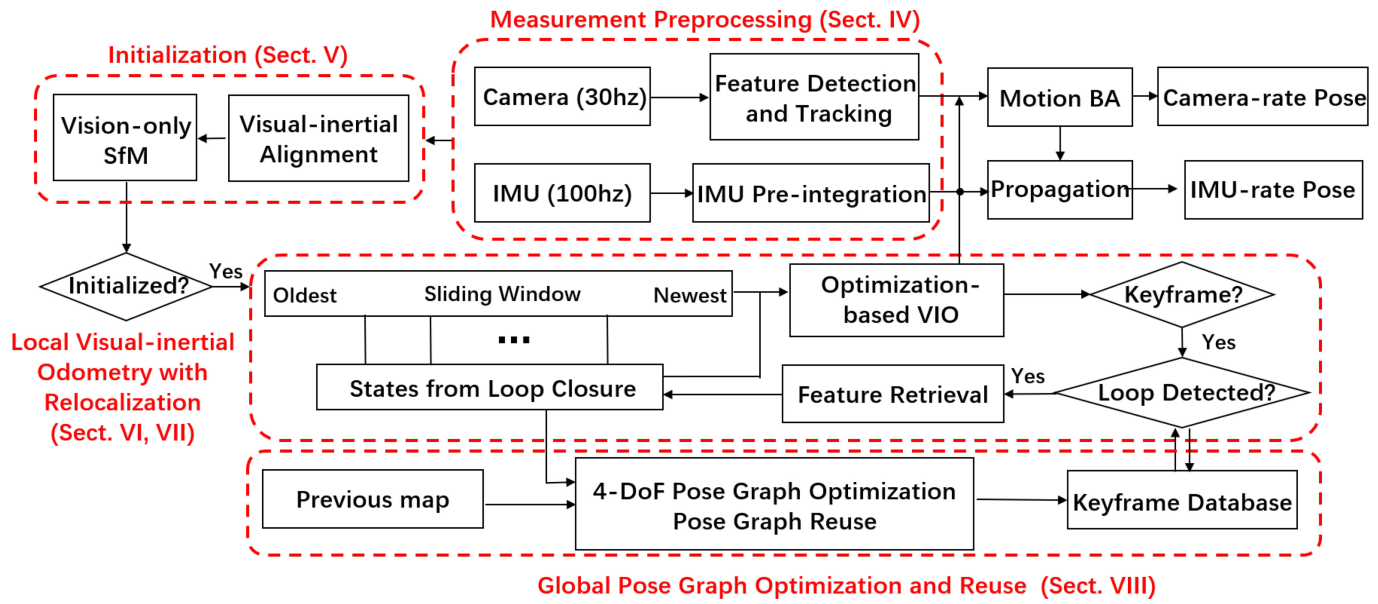
vins-mono 概述
解读vins-mono
-
首先 Measurement Preprocessing (Vision Processing Front End + IMU Preintegration Processing)开始 ;
-
然后通过一个松耦合的方式来做初始化;
-
再通过一个紧耦合的方式来做 Local Visual-inertial Odometry;
1. Measurement Preprocessing 过程
- Visual Preprocessing 每一帧图像特征点提取和 KLT稀疏光流追踪
- IMU Preprocessing 两帧图像之间IMU预积分
- Keyframe Selection
2. Estimator Initialization 过程
- 首先是 Monocular Vision-Only SfM in Sliding Window 得到一个初步的平移和旋转
- Camera - IMU rotation calibration
- Visual-inertial alignment 对齐
3. Tightly Computed Monocular VIO
Nonlinear graph optimization-based, tightly-coupled, sliding windows, visual-inertial bundle adjustment
代码解读
各文件夹功能解读
| code | 功能 |
|---|---|
| ar_demo | 视觉定位的一个小应用demo |
| benchmark_publisher | 订阅估计的estimated_odometry, 然后与CVS中的groundtruth对比 |
| calibration_images | 订阅相机的话题,保存成图片,用于相机校准,支持鱼眼相机,针孔相机 |
| camera_model | 各种相机模型的校准,入口函数 |
| config | 配置参数文件 |
| feature_tracker | 使用光流法追踪特征点 |
| pose_graph | 后端优化 |
| vins_estimator | 状态估计 |
从CMakeLists.txt分析
| CMake files | function |
|---|---|
| vins_estimator/CmakeLists.txt | 生成 vins_estimator Node |
| feature_tracker/CmakeLists.txt | 生成 feature_tracker Node |
| pose_graph/CmakeLists.txt | 生成 pose_graph Node |
| camera_model/CmakeLists.txt | 生成Calibration可执行程序 和camera_model库 |
vins_estimator
-
入口函数为
estimator_node.cpp/main() -
readParameters(n); 读取优化参数,IMU噪声和偏置,IMU-camera内参等
-
estimator.setParameter(); tic ric
-
订阅 imu_callback feature_callback restart_callback relocalization_callback
-
发布 Odometry path point-cloud
-
订阅话题的回调函数只是数据缓存到 buf
-
真正的处理在线程 std::thread measurement_process{process};中
getMeasurements 通过时间戳,简单地对齐 IMU 和 feature point
对于每一个IMU数据: estimator.processIMU(dt, Vector3d(dx, dy, dz), Vector3d(rx, ry, rz));
对于每一帧CAM数据: estimator.processImage(image, img_msg->header);
publish Odometry/KeyPoses/CameraPose/PointCloud/TF/Keyframe
vins-estimator 主要程序,
pose_garph
feature_tracker 使用光流法追踪特征点
intrinsic_calib.cc 从其他的库复制过来的
从多线程角度分析
功能类的问题
附录:
参数/变量 名称
| 参数名称 | 类型 | 来源 | 功能 |
|---|---|---|---|
| IMAGE_TOPIC | string | yaml config file/image_topic | 订阅图像话题名称 |
| IMU_TOPIC | string | yaml config file/imu_topic | 订阅IMU话题名称 |
| MAX_CNT | int | yaml config file/max_cnt | max feature number in feature tracking |
| MIN_DIST | int | yaml config file/min_dist | min distance between two features |
| ROW | int | yaml config file/image_height | 像素行数-图像高度 |
| COL | int | yaml config file/image_width | 像素列数-图像宽度 |
| FREQ | int | yaml config file/freq | frequence (Hz) of publish tracking result. At least 10Hz for good estimation. If set 0, the frequence will be same as raw image |
| F_THRESHOLD | double | yaml config file/F_threshold | ransac threshold (pixel) |
| SHOW_TRACK | int | yaml config file/show_track | 是否发布 tracking image话题 |
| EQUALIZE | int | yaml config file/equalize | 当图像太亮/暗,是否打开均衡补偿 |
| FISHEYE | int | yaml config file/fisheye | 是否使用鱼眼相机 |
| FISHEYE_MASK | string | yaml config file/fisheye=1 | fisheye_mask.jpg路径 |
| CAM_NAMES | std::vector<std::string> | parameter.cpp全局变量 | 像素列数-图像宽度 |
| WINDOW_SIZE | int | parameter.cpp全局变量 20 | 滑动窗口的大小 |
| STEREO_TRACK | int | parameter.cpp全局变量 false | 是否使用双目追踪 |
| FOCAL_LENGTH | int | parameter.cpp全局变量 460 | 焦距 |
| PUB_THIS_FRAME | int | parameter.cpp全局变量 false | 不发布这帧 |
| NUM_OF_CAM | int | parameter.h 1 | camera的数量 |
| modelType | Camera::ModelType | yaml config file/model_type kannala_brandt/mei/scaramuzza/pinhole | camera的模型 |
| SOLVER_TIME | double | max_solver_time | 确保实时性,最大求解时间 0.04ms |
| NUM_ITERATIONS | int | max_num_iterations | 确保实时性,最大迭代次数 8,避免冗余计算 |
| MIN_PARALLAX | double | keyframe_parallax | 关键帧选择的视差阈值 10 pixel |
| VINS_RESULT_PATH | int | output_path/vins_result_no_loop.csv | 不加回环的输出结果 |
| ESTIMATE_EXTRINSIC | int | estimate_extrinsic | IMU和cam相对外参的方式选择,0-有准确可信的参数;1-有一组初始值,后面将基于此再优化,2-完全不知道相对外参,启动之初进行在线校准(注意开始的时候要有旋转) 保存在 output_path/extrinsic_parameter.csv中 |
| RIC[0] cv_R eigen_R | Eigen::Matrix3d | extrinsicRotation | IMU与camera的旋转 |
| TIC[0] cv_T eigen_T | Eigen::Vector3d | extrinsicRotation | IMU与camera的平移 |
| INIT_DEPTH | double | vins_estimator/parameters.h | camera的数量 |
| BIAS_ACC_THRESHOLD | double | vins_estimator/parameters.h 1 | acc偏置的阈值 |
| BIAS_GYR_THRESHOLD | double | vins_estimator/parameters.h 1 | 陀螺仪偏置的阈值 |
| TD | int | config/td | IMU与camera的固有时钟差 |
| ESTIMATE_TD | int | config/estimate_td | 置位online estimate time offset between camera and imu |
| ROLLING_SHUTTER | int | rolling_shutter: 0 | 0-全局快门;1-卷帘快门 |
NUM_OF_CAM | int | parameter.h 1 | camera的数量
class 名称
FeatureTracker 特征点追踪类
- FeatureTracker trackerData[NUM_OF_CAM];
CameraFactory 不同的相机类型和校准模型
- static boost::shared_ptr instance(void);
TicToc 计算时间差的功能类
Estimator
参考文档:
最后
以上就是能干荷花最近收集整理的关于VINS-Mono视觉SLAM总体设计框架解读的全部内容,更多相关VINS-Mono视觉SLAM总体设计框架解读内容请搜索靠谱客的其他文章。








发表评论 取消回复