目录
一、简介
二、环境版本
三、学习目标
四、知识储备
五、任务实施
六、任务拓展
七、课堂小结
八、课后练习
一、简介
大家好,欢迎关注遨博学院带来的系列技术分享文章(协作机器人ROS开发),今天我们来学习机械臂URDF功能包ROS仿真。
在前面课程中,我们使用SolidWorks插件生成了机械臂的URDF功能包,本节课讲解如何使用导出机械臂的URDF功能包在ROS系统下进行仿真使用。
机械臂URDF功能包ROS仿真
二、环境版本
- 主机系统版本:Windwos10 64位
- 处理器型号:Intel-i7
- 虚拟机版本:VMware Workstation 16 Pro
- 虚拟机系统:Ubuntu 18.04.6 LTS
- ROS版本:Melodic
三、学习目标
四、知识储备
首先了解机械臂URDF功能包文件结构。
文件夹目录树如下。

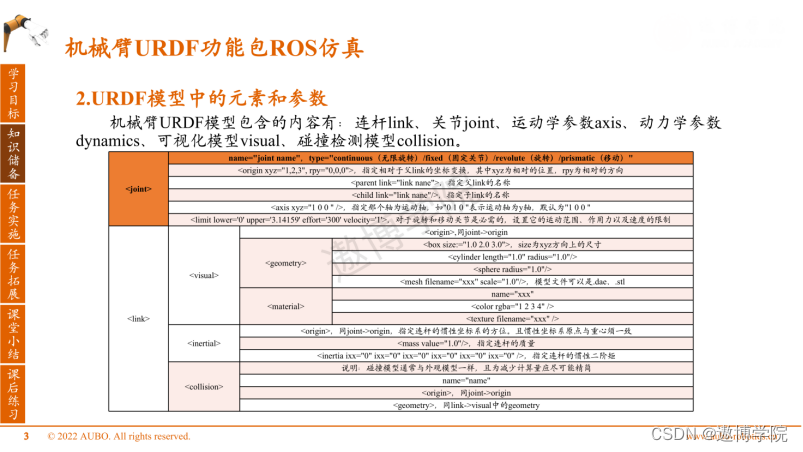
接下来学习URDF模型中的元素和参数。
机械臂URDF模型包含的内容有:连杆link、关节joint、运动学参数axis、动力学参数dynamics、可视化模型visual、碰撞检测模型collision。具体元素和参数介绍如下表所示。
五、任务实施
本课程使用《SolidWorks插件生成机械臂URDF功能包》课程中生成的ROS工程。
机械臂URDF功能包ROS仿真测试包含以下三步。
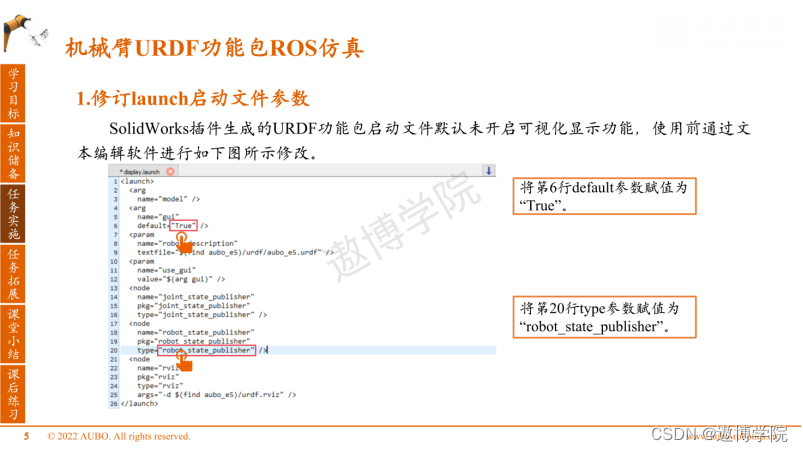
1.修订launch启动文件参数
SolidWorks插件生成的URDF功能包启动文件默认未开启可视化显示功能,使用前通过文本编辑软件进行,如下图所示修改。
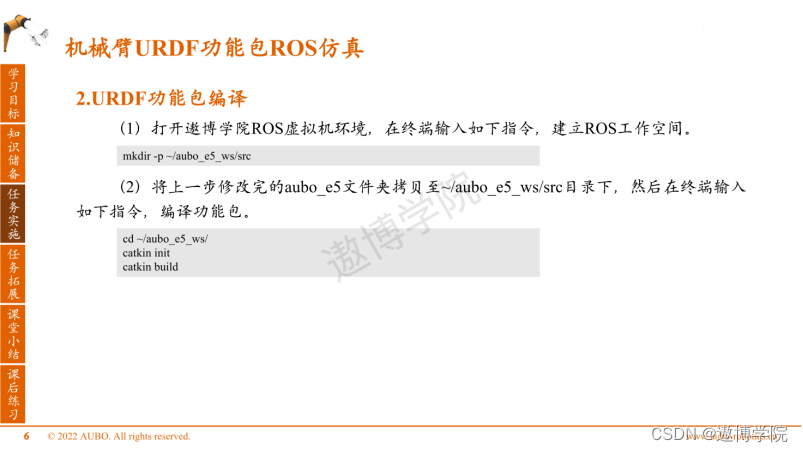
2.URDF功能包编译
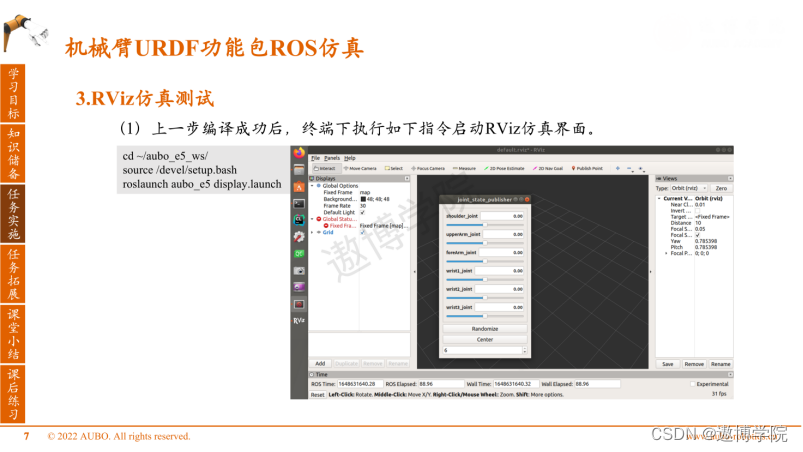
3.RViz仿真测试
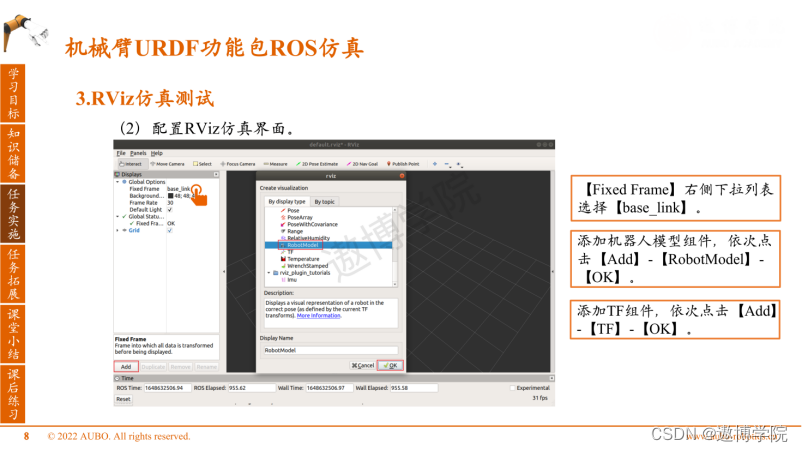
配置RViz仿真界面,步骤如下:
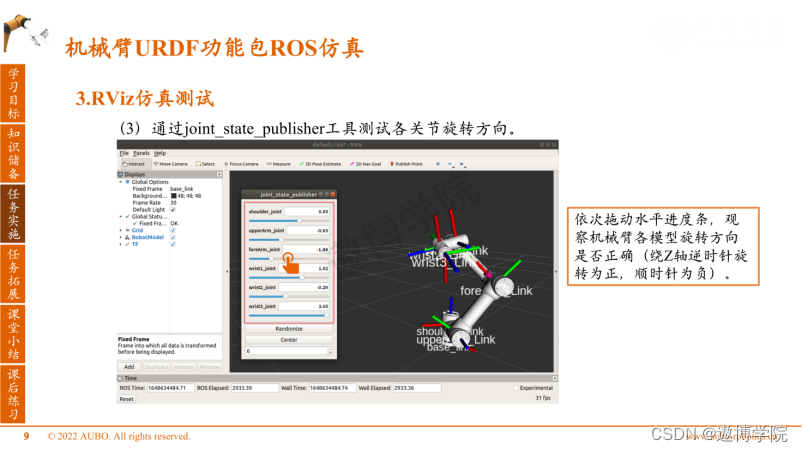
接下来通过joint_state_publisher工具测试各关节旋转方向。
依次拖动水平进度条,观察机械臂各模型旋转方向是否正确。
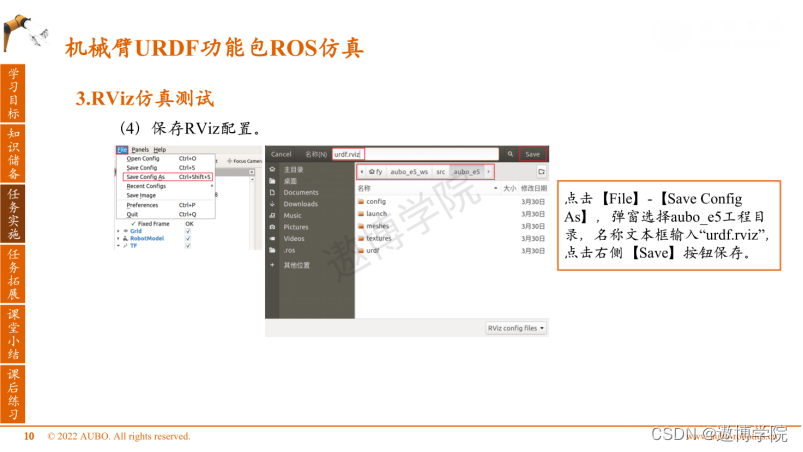
最后保存RViz配置,方便下次直接启动。
六、任务拓展
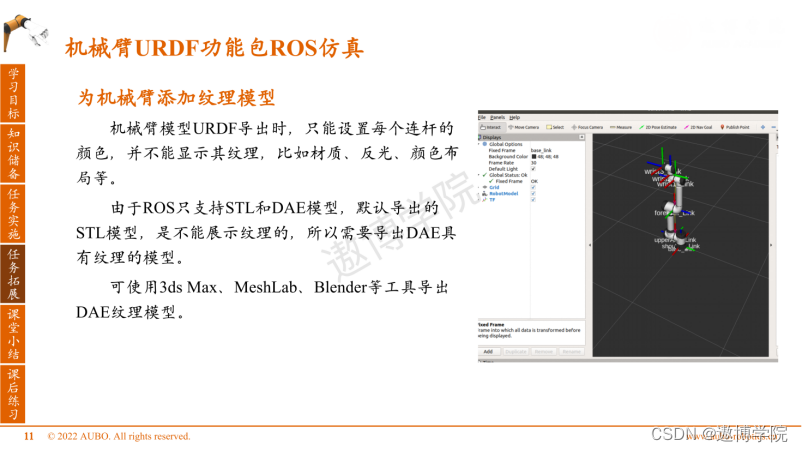
为机械臂添加纹理模型。
七、课堂小结
通过本篇文章的学习,用户可以基本掌握遨博E5机械臂URDF功能包ROS系统下的使用方法,小结如下。
八、课后练习
在接下来的ROS课程中,我们会讲解《MoveIt!设置助手机械臂配置》,欢迎持续关注。
最后
以上就是繁荣雨最近收集整理的关于遨博协作机器人ROS开发 - 机械臂URDF功能包ROS仿真一、简介二、环境版本三、学习目标四、知识储备五、任务实施六、任务拓展七、课堂小结八、课后练习的全部内容,更多相关遨博协作机器人ROS开发内容请搜索靠谱客的其他文章。








发表评论 取消回复