我是靠谱客的博主 拉长纸飞机,这篇文章主要介绍ABB机器人(robotstudio仿真)中第七轴,即导轨的设置问题问题:在robot studio仿真中使用自定义的外部轴后,机器人不按照设定的路径走。解决方法如下(仅供参考,毕竟每个人遇到的问题不完全相同)第七轴分为两种:,现在分享给大家,希望可以做个参考。
问题:在robot studio仿真中使用自定义的外部轴后,机器人不按照设定的路径走。解决方法如下(仅供参考,毕竟每个人遇到的问题不完全相同)
第七轴分为两种:
一、第一种是系统自带的第七轴,导入机器人模型和导轨模型,然后创建机器人系统即可(注意顺序)。
二、第二种是自定义的第七轴
1、首先需要创建一个外轴,外轴有两部分组成,底部固定的轴和可以在轴上滑动的物体(分别对应下图中的导轨和底座),如下图所示:
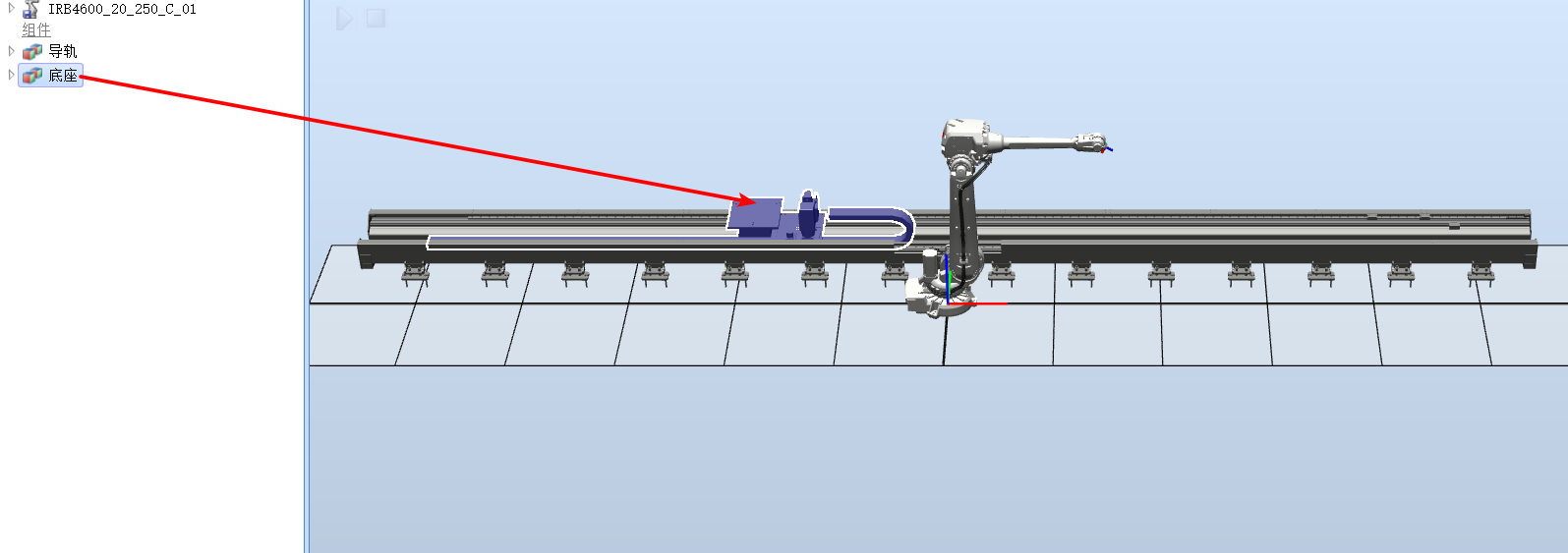
注:以下内容导轨和底座即底部固定的轴和可以在轴上滑动的物体
2、创建外轴之前需要将导轨和底座的本地原点设置到大地坐标,同时导轨和底座需要断开库连接,机器人导入后也保持原有的位置不变
3、创建外轴时,所选框架的方向需要与大地坐标的方向相同,位置可以不同
4、此时,需要先创建不带第七轴的机器人系统,可选择从已有布局创建
5、随后需要配置第七轴,请参考以下博文的内容:
https://blog.csdn.net/Square_KG/article/details/100651635
6、在通过外部轴向导配置外部轴的时候需要注意,这些问题是上面参考博文中没有的
①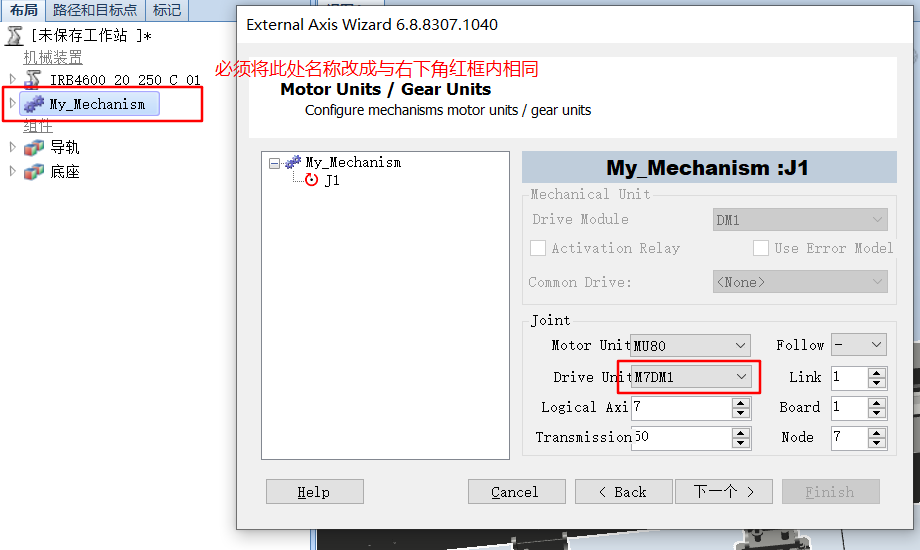
②将机器人安装至第七轴时出现任务框架是否跟随,选择是,出现是否重启,选择是
③安装重启后没有任何错误和警告即可,如下图

④此时机器人所安装的方向或许不是我们想要的,可以设定机器人的位置来重新设置方向,出现一下窗口选择否,再弹出一个窗口说数据不同是否重启,选择是

最后
以上就是拉长纸飞机最近收集整理的关于ABB机器人(robotstudio仿真)中第七轴,即导轨的设置问题问题:在robot studio仿真中使用自定义的外部轴后,机器人不按照设定的路径走。解决方法如下(仅供参考,毕竟每个人遇到的问题不完全相同)第七轴分为两种:的全部内容,更多相关ABB机器人(robotstudio仿真)中第七轴,即导轨的设置问题问题:在robot内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复