原文链接:https://www.cnblogs.com/zitech/p/5033851.html
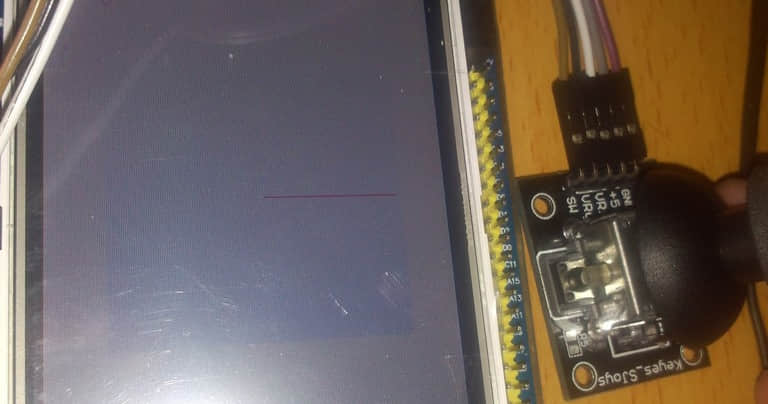
实验使用如下所示的双轴按键摇杆控制器,来控制TFTLCD上显示的直线首先介绍一下双轴按键摇杆控制器。原理:十字摇杆为一个双向的10K电阻器,随着摇杆方向不同,抽头的阻值随着变化。本模块使用5V供电(在本实验中使用3.3V ),原始状态下X,Y读出电压为2.5V左右(本实验为1.65V),当随箭头方向按下,读出电压值随着增加,最大到5V (本实验最大为3.3V) ;箭头相反方向按下,读出电压值减少,最小为0V即模块特设二路模拟输出和一路数字输出接口,输出值分别对应(X,Y)双轴偏移量,其类型为模拟量;按键表示用户是否在ž轴上按下,类型其为数字开关量坐标标识符清晰简明,准确定位;用其可以轻松控制物体(如二自由度舵机云台)在二维空间运动。

实验目的:
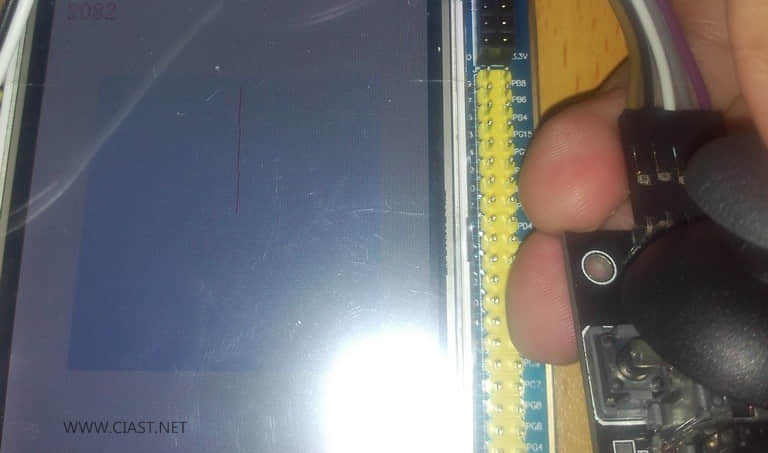
在屏幕的中心区域显示一条射线,射线起点为屏幕中心(120160),射线方向与摇杆歪的方向相同,射线长度与歪的程度有关线路连接。:
PC1 - ADC1 channel_11; PC0 - ADC1 channel_10;
PC2 - SW;

实验准备:
如图1所示,实验中对摇杆两个模拟段输入的检测需要使用STM32的ADC功能;
2,在数据转换之后的移动数据时使用DMA,以将数据及时转移出ADC的寄存器;
我们先来看看主函数,在主函数中我们定义了浮点型数组float ADC_ConvertedValueLocal [2];用于保存转换计算后的电压值,还有在adc.c文件中定义的数组ADC_ConvertedValue [2] ;用来装转换后的数据。

的的#include <stdio.h>中中 的的#include “ stm32f10x.h ” 的的#include “ led.h ” 的的#include “ delay.h ” 的的#include “ key.h ” 的的#include “ timer.h ” 的#包括“ beep.h ” #包括“ usart.h中” 的#include “ adc.h ” 的#include “ lcd.h用于” // ADC1转换的电压值通过MDA方式传到SRAM 外部 __IO uint16_t ADC_ConvertedValue [ 2 ]; // 局部变量,用于保存转换计算后的电压值 float ADC_ConvertedValueLocal [ 2 ]; int main(void ) { u8 x = 0 ; u8 lcd_id [ 12 ]; // 存放LCD ID字符串 SysTick_Init(); // 延时 初始化USART1_Int(9600 ); LCD_Init(); ADC1_Init(); POINT_COLOR = RED; 而(1 ) { 如果(GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_2)!= 1 ){ LCD_Clear(黄色); LCD_ShowString(20,100,200,100,16,“ 谢谢你! ” ); Delay_ms(2000 ); LCD_Clear(白色); } 对于(x = 0 ; x < 2 ; x ++ ){ ADC_ConvertedValueLocal [x] =(float)ADC_ConvertedValue [x] / 4096 * 3.3 ; // 读取转换的AD值 LCD_ShowxNum(0,0 + X * 20,ADC_ConvertedValue [X],5,16,0 ); } LCD_DrawLine(124,158,165 - (50 * ADC_ConvertedValueLocal [ 1 ])+ 42,50 * ADC_ConvertedValueLocal [ 0 ] + 78 ); Delay_ms(100 ); LCD_Fill(34,72,210,246 ,LGRAY); } }
在主函数的而(1)循环之前,我进了三个初始化,分别是:
USART1_Int(9600 ); LCD_Init(); ADC1_Init();
在这里第一个就不在介绍,不懂解的可以参考:http://www.ciast.net/post/2015119.html 。第二个在这里也不作为重点介绍,TFTLCD的介绍可以参见 http:/ /www.ciast.net/post/20151112.html ,在这里我们会使用到lcd.c中定义的一些操作液晶屏的函数,如下所示:
// 清屏函数 // 颜色:清要屏的 填充色空隙LCD_Clear(U16颜色); // 在指定区域内填充单个颜色 // (SX,SY),(例如,EY):填充矩形对角坐标,区域大小为:(前SX + 1)*(EY-SY + 1) // 颜色:要 填充的颜色空隙LCD_Fill(U16 SX,SY U16,U16 EX,EY U16,U16颜色); // 画线 // x1,y1:起点坐标 // x2,y2:终点坐标 void LCD_DrawLine(u16 x1,u16 y1,u16 x2,u16 y2); // 显示数字,高位为0,还是显示 // x,y:起点坐标// num:数值(0〜999999999 ); // len:长度(即要显示的位数) //size:字体大小 // mode: // [7]:0,不填充; 1,填充0. // [6:1]:保留 // [0]:0,非叠加显示; 1,叠加显示。 空隙LCD_ShowxNum(U16的x,U16 Y,U32 NUM,U8 LEN,U8大小,U8模式); // 显示字符串 // x,y:起点坐标 // 宽度,高度:区域大小 // 尺寸:字体大小 // * p:字符串起始地址 void LCD_ShowString(u16 x,u16 y,u16 width,u16身高,u8大小,u8 * p)
这些功能将在一段时间(1)循环中使用我们现在着重要将的是ADC1_Init();这个初始化函数,我们找到这个函数的定义,内容如下:
/ * *函数名:ADC1_Init *描述:无 *输入:无 *输出:无 *调用:外部调用 * / void ADC1_Init(void ) { ADC1_GPIO_Config(); ADC1_Mode_Config(); }
这个函数由另外两个函数组成,分别是:
/ * *函数名:ADC1_GPIO_Config *描述:使能ADC1和DMA1的时钟,初始PC.00,PC.01和PC.02 *输入:无 *输出:无 *调用:内部调用 * / static void ADC1_GPIO_Config(void ); / * 函数名:ADC1_Mode_Config *描述:配置ADC1的工作模式为MDA模式 *输入:无 *输出:无 *调用:内部调用 * / static void ADC1_Mode_Config(void);
首先看的是第一个函数,即引脚定义:
/ * *函数名:ADC1_GPIO_Config *描述:使能ADC1和DMA1的时钟,初始化PC.01 *输入:无 *输出:无 *调用:内部调用 * / static void ADC1_GPIO_Config(void ) { GPIO_InitTypeDef GPIO_InitStructure; / * 启用DMA 时钟* / RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1,ENABLE); / * 使能ADC1和 GPIOC 时钟* / RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1 | RCC_APB2Periph_GPIOC,ENABLE); / *将PC.01配置为模拟输入* / GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_0; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; GPIO_Init(GPIOC,&GPIO_InitStructure); // PC1 PC0,输入时不用设置速率 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOC,&GPIO_InitStructure); // PC2设置按键功能 }
我将两个模拟输入设置为GPIO_Mode_AIN(模拟输入),将PC2按键功能键设置成上拉输入(摇杆的SW引脚已经被上拉)。下面是重点:
在ADC1_GPIO_Config(void )函数中,我们主要进行的是DMA和ADC1双通道的设置,下面我们对负责传输的DMA进行设置:
DMA_InitTypeDef DMA_InitStructure; / * DMA通道1配置* / DMA_DeInit(DMA1_Channel1); DMA_InitStructure.DMA_PeripheralBaseAddr = ADC1_DR_Address; // ADC地址 DMA_InitStructure.DMA_MemoryBaseAddr =(u32)&ADC_ConvertedValue; // 内存地址 DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; DMA_InitStructure.DMA_BufferSize = 2 ; DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; // 外设地址固定 DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; // 内存地址固定 DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord; // 半字 DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord; DMA_InitStructure.DMA_Mode = DMA_Mode_Circular; // 循环传输 DMA_InitStructure.DMA_Priority = DMA_Priority_High; DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; DMA_Init(DMA1_Channel1,&DMA_InitStructure); / * 启用DMA通道1 * / DMA_Cmd(DMA1_Channel1,ENABLE);
下面我们开始使用ADC1的通道10和通道11来转换接受到的虚拟信号:
ADC_InitTypeDef ADC_InitStructure; / * ADC1配置* / ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; // 独立ADC模式 ADC_InitStructure.ADC_ScanConvMode = ENABLE; // 禁止扫描模式,扫描模式用于多通道采集 ADC_InitStructure.ADC_ContinuousConvMode = ENABLE; // 开启连续转换模式,即不停地进行ADC转换 ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; // 不使用外部触发转换 ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; // 采集数据右对齐 ADC_InitStructure.ADC_NbrOfChannel = 2 ; // 要转换的通道数目2 ADC_Init(ADC1,&ADC_InitStructure); / * 配置ADC时钟,为PCLK2的8分频,即9Hz * / RCC_ADCCLKConfig(RCC_PCLK2_Div8); / * 配置ADC1的通道11为55. 5 个采样周期,序列为1 * / ADC_RegularChannelConfig(ADC1,ADC_Channel_11,1 ,ADC_SampleTime_55Cycles5); ADC_RegularChannelConfig(ADC1,ADC_Channel_10,2,ADC_SampleTime_55Cycles5); // ADC1; ADC1通道0;第2转换;采样时间为239.5周期 ADC_DMACmd(ADC1,ENABLE); / * 启用ADC1 DMA * / ADC_Cmd(ADC1,ENABLE); / * 启用ADC1 * / ADC_ResetCalibration(ADC1); / * 复位校准寄存器* / while (ADC_GetResetCalibrationStatus(ADC1)); / * 等待校准寄存器复位完成* / ADC_StartCalibration(ADC1); / * ADC校准* / while(ADC_GetCalibrationStatus(ADC1)); / * 等待校准完成* / / * 由于没有采用外部触发,所以使用软件触发ADC转换* / ADC_SoftwareStartConvCmd(ADC1,ENABLE);
我把整个ADC的设置分成了四个部分:
第一部分:主要是ADC的初始化参数配置函数,具体设置可以参考:http://www.ciast.net/post/20151226.html ,在这里使用独立ADC模式模式,由于使用了双通道,所以ADC_ScanConvMode = ENABLE;即开启扫描模式,且ADC_NbrOfChannel = 2;
第二部分:主要是配置ADC时钟和规则通道设置这里由于ADC的频率不能大于12MHz的的,所以我们选择分频为PCLK2的8分频,即9HZ 规则通道的设置是每一个通道都要进行的,可以设置通道和扫描顺序以及扫描周期等,这也是ADC设置的重点,可以参考 http://www.ciast.net/post/20151226.html 。
第三部分:主要是使能DMA和ADC,以及复位校准;
第四部分:使用软件触发ADC转换,转换开始。
至此初始化函数介绍完毕,下面开始的同时(1)循环部分的介绍:
而(1 ) { 如果(GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_2)!= 1 ){ LCD_Clear(黄色); LCD_ShowString(20,100,200,100,16,“ 谢谢你! ” ); Delay_ms(2000 ); LCD_Clear(白色); } 对于(x = 0 ; x < 2 ; x ++ ){ ADC_ConvertedValueLocal [x] =(float)ADC_ConvertedValue [x] / 4096 * 3.3 ; // 读取转换的AD值 LCD_ShowxNum(0,0 + X * 20,ADC_ConvertedValue [X],5,16,0 ); } LCD_DrawLine(124,158,165 - (50 * ADC_ConvertedValueLocal [ 1 ])+ 42,50 * ADC_ConvertedValueLocal [ 0 ] + 78 ); Delay_ms(100 ); LCD_Fill(34,72,210,246 ,LGRAY); }
其中的重点是FOR语句:
对于(x = 0 ; x < 2 ; x ++ ){ ADC_ConvertedValueLocal [x] =(float)ADC_ConvertedValue [x] / 4096 * 3.3 ; // 读取转换的AD值 LCD_ShowxNum(0,0 + X * 20,ADC_ConvertedValue [X],5,16,0 ); }
在这个循环语句中,我们读取两个通道中的数据。其中ADC_ConvertedValue [X]为我们在一开始就定义的用户存数处理过的数据的数组,其中X取1和2为什么这个数组?可以接受到两个通道的数据呢其实在DMA中我们设置了数据的传输:
DMA_InitStructure.DMA_PeripheralBaseAddr = ADC1_DR_Address; // ADC地址 DMA_InitStructure.DMA_MemoryBaseAddr =(u32)&ADC_ConvertedValue; // 内存地址 DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
其中传输方向是从外设到内存,而内存地址,我们取得就是这个数组的首地址,这样转换过的数据自然就被传到了这个数组中。那么传输之前数据的处理又是怎么进行的呢?从下面的程序可以看到,我们在ADC设置时,使能了扫描和连续转换,且通道数目为2,那么在连续转换时,ADC就会按照下面ADC_RegularChannelConfig中设置的转换顺序进行连续的转换所有的通道(即转换完通道1后转换通道2)。每次转换完一个通道后,转换好的数据就会被DMA转走,从而回到了上面的步骤。
ADC_InitStructure.ADC_ScanConvMode = ENABLE; // 禁止扫描模式,扫描模式用于多通道采集 ADC_InitStructure.ADC_ContinuousConvMode = ENABLE; // 开启连续转换模式,即不停地进行ADC转换 ADC_InitStructure.ADC_NbrOfChannel = 2 ; // 要转换的通道数目2 ------------------------------------------ ---------------------------------------------- ADC_RegularChannelConfig(ADC1, ADC_Channel_11,1 ,ADC_SampleTime_55Cycles5); ADC_RegularChannelConfig(ADC1,ADC_Channel_10,2,ADC_SampleTime_55Cycles5); // ADC1; ADC1通道0;第2转换;采样时间为239.5周期
下面的语句是FOR语句下面的,实现的是话射线功能,我们使用的屏是240×320的,图形具体尺寸见下图:
LCD_DrawLine(124,158,165 - (50 * ADC_ConvertedValueLocal [ 1 ])+ 42,50 * ADC_ConvertedValueLocal [ 0 ] + 78 ); Delay_ms(100 ); LCD_Fill(34,72,210,246,LGRAY);
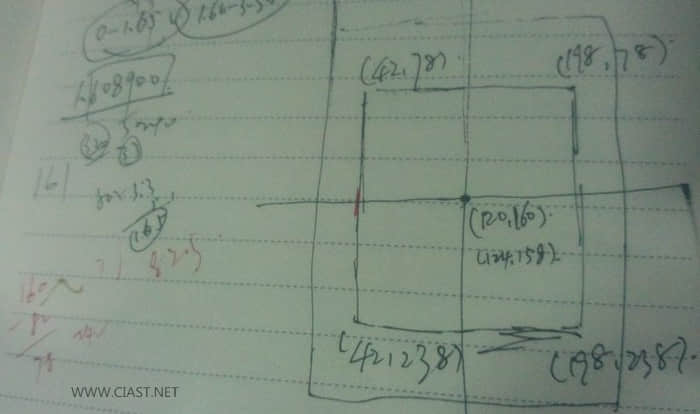
中间一点是理论中心点(120160),但是由于摇杆的电压不是太稳定,出现了电压波动,所示实际中心点是(124159),中间的正方形是射线的边界。
还有最后的IF语句,设置的是按下是的操作,实现的是按下后在屏幕上刷黄色屏,出现一个字符串:
如果(GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_2)!= 1 ){ LCD_Clear(黄色); LCD_ShowString(20,100,200,100,16,“ 谢谢你!” ); Delay_ms(2000 ); LCD_Clear(白色); }
现在整个实验就结束了。这个实验今天从早上7点多开始,我一直弄到下午4点半才成功,中间还百度了很多资料。
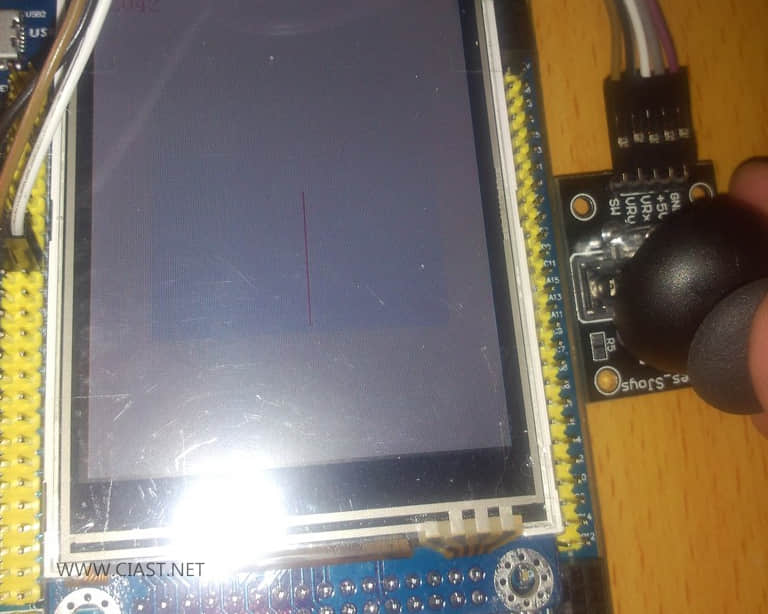
最终效果如下:
最后
以上就是开心水蜜桃最近收集整理的关于基于STM32控制的PS2摇柄模块—双轴按键摇杆控制器控制TFTLCD的全部内容,更多相关基于STM32控制内容请搜索靠谱客的其他文章。








发表评论 取消回复