多臂强盗(n台老虎机)问题
在构建AlphaGo之前,先尝试一个简单的问题热热身, n n n 台老虎机(多臂强盗问题),把对 n n n 台老虎机操作看作是 n n n 个不同的动作,即:每个动作 a a a 对应一台特定的老虎机.在每次游戏 k k k 中,玩家可以操作任意一台老虎机,这个操作即:动作 a a a,操作后玩家会获得奖励 R ( k ) R(k) R(k), 每台老虎机的奖励概率是固定的.
如何在这个游戏中获得更高的奖励
靠谱的策略是:
- 探索阶段:
- 尽可能的多玩几次,选择不同的机子,并观察每个机子( a a a)对应的回报 R k ( a ) R_k(a) Rk(a).
- 贪心阶段:
- 每次都之选择观察到平均回报最大的 a a a.根据预期的回报来指导下一步的动作.
- 探索和贪心之间的权衡
- 停止探索:仅仅利用当前的信息,选择最佳的 a a a,可能会忽略全局最优的 a a a
- 随机探索:掌握更多的信息,避免陷入局部最优,但是要浪费更多的时间和金钱
- 贪心和探索之间的有效权衡才能最大化回报
值函数
用 Q k ( a ) Q_k(a) Qk(a)表示, Q Q Q函数是一个动作值函数,计算采取特定动作的价值.
Q k ( a ) = ∑ i = 1 k R i k a Q_k(a) = frac{ sum_{i=1}^k R_i}{k_a} Qk(a)=ka∑i=1kRi
- Q k ( a ) Q_k(a) Qk(a) : 第 k k k 次游戏中对 a a a 的预期奖励 = a a a获得奖励的算数平均值
- R i R_i Ri : 动作 a a a 之前获得奖励
- k a k_a ka : 动作 a a a 被执行的次数
动作选择函数
a = a r g m a x a ( [ Q k ( a 1 ) , Q k ( a 2 ) , . . . Q k ( a n ) ] ) a = argmax_{a}([Q_k(a_1),Q_k(a_2), ...Q_k(a_n) ]) a=argmaxa([Qk(a1),Qk(a2),...Qk(an) ])
动作选择函数的计算仅仅考虑我们探索过的动作,如果之前没有完全探索全部的动作,每次我们都只会在有限动作空间中做选择.为了避免陷入这样的局部最优,我们需要同时考虑探索和贪心的策略,在每一次游戏中,以一定的概率随机探索一个动作,剩下的概率中,根据值函数 Q Q Q 和 动作选择函数选择最佳的动作.其实就是,我们需要设置一个阈值 ε varepsilon ε,每次游戏以 ε varepsilon ε概率采取一些冒险的策略, 1 − ε 1-varepsilon 1−ε采用贪心的策略.
# 遍历之前的动作找到reward的最高的动作
def get_best_action(actions):
best_action = 0
max_action_value = 0
for i in range(len(actions)):
cur_action_value = get_action_value(actions[i])
if cur_action_value > max_action_value:
best_action = i
max_action_value = cur_action_value
return best_action
# 找到奖励最多的动作
def get_best_arm(record):
arm_index = np.argmax(record[:,1],axis=0)
return arm_index
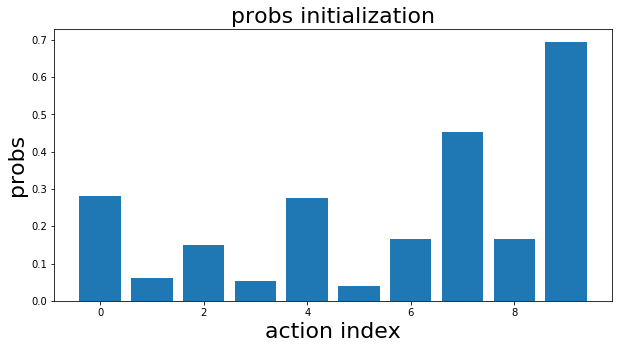
probs initialization
初始化每个动作 a a a 的奖励概率
n = 10 # n 个机械臂
probs = np.random.rand(n) # n 个机械臂概率的初始化
奖励函数
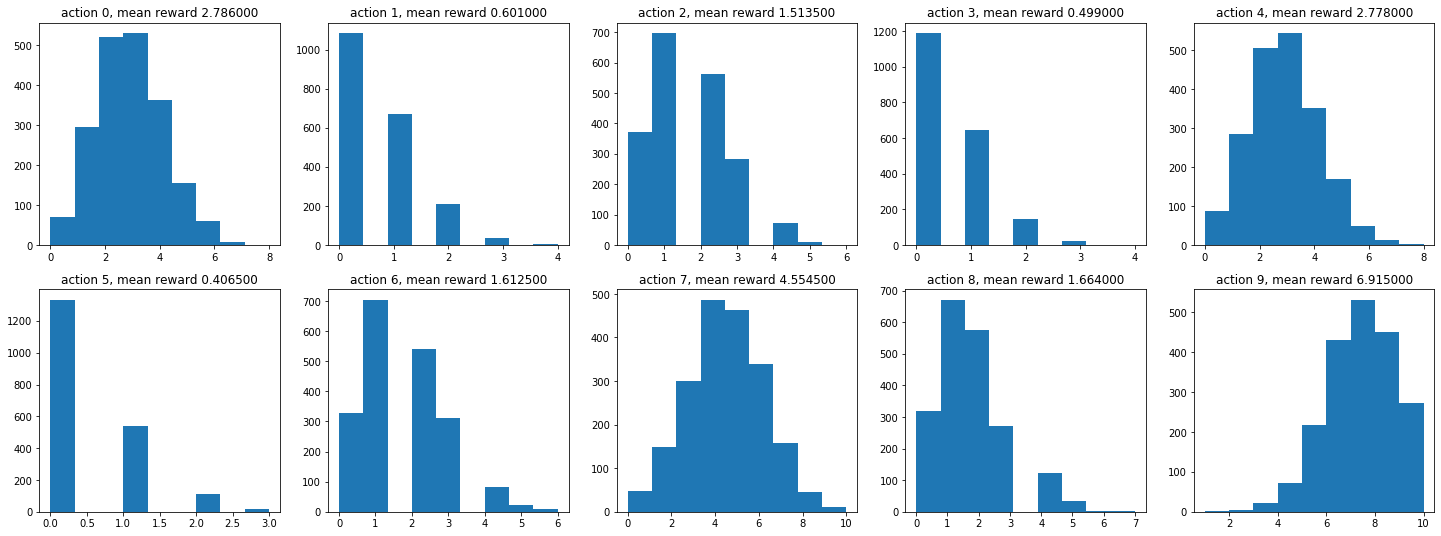
每个动作 a a a 有一个奖励概率,每个动作的最高奖励为10美元。每次如果随机数小于 a a a 的概率,它的奖励增加+1。完成10次迭代,返回最终的总奖励,奖励可能是0到10之间的任何值。如果某一动作的奖励概率为0.7,则执行尽可能多的该动作,平均奖励为7,但是在任何单次游戏中,为1~10之间的随机值。
def get_reward(prob, n=10):
reward = 0;
for i in range(n):
if random.random() < prob:
reward += 1
return reward
每个动作执行2000次的奖励分布
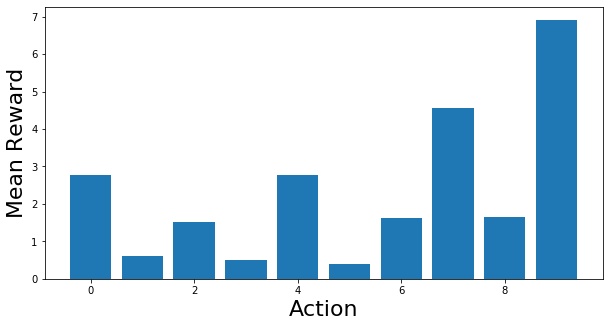
每个动作的平均奖励
初始化record
- count : action 重复次数
- avg reward : 平均奖励
# 10 actions x 2 columns
# Columns: Count #, Avg Reward
# 动作奖励二维表格
# 更新动作奖励二维数组
def update_record(record,action,r):
new_r = (record[action,0] * record[action,1] + r) / (record[action,0] + 1)
record[action,0] += 1
record[action,1] = new_r
return record
record = np.zeros((n,2))
print(record)
[[0. 0.]
[0. 0.]
[0. 0.]
[0. 0.]
[0. 0.]
[0. 0.]
[0. 0.]
[0. 0.]
[0. 0.]
[0. 0.]]
600次模拟操作
-
ε
varepsilon
ε = 0.2, 随机值 > 0.2, 从record中找平均奖励最大的action
- 计算奖励,更新record
-
ε
varepsilon
ε < 0.2, 随机操作
- 计算奖励,更新record
- ε varepsilon ε 值越大,随机探索的次数就越多,收敛的就越慢
def simulation_argmax(num_n, p=0.3):
record = np.zeros((n, 2))
rewards = [0]
record_dict = {}
actions = []
for i in range(600):
if random.random() > p:
choice = get_best_arm(record)
else:
choice = np.random.randint(10)
actions.append(choice)
r = get_reward(probs[choice])
record = update_record(record,choice,r)
record_dict[i] = record.copy()
mean_reward = ((i+1) * rewards[-1] + r)/(i+2) # (r - reward[-1])/(i+1)+reward[-1]
rewards.append(mean_reward)
return rewards, record_dict, actions
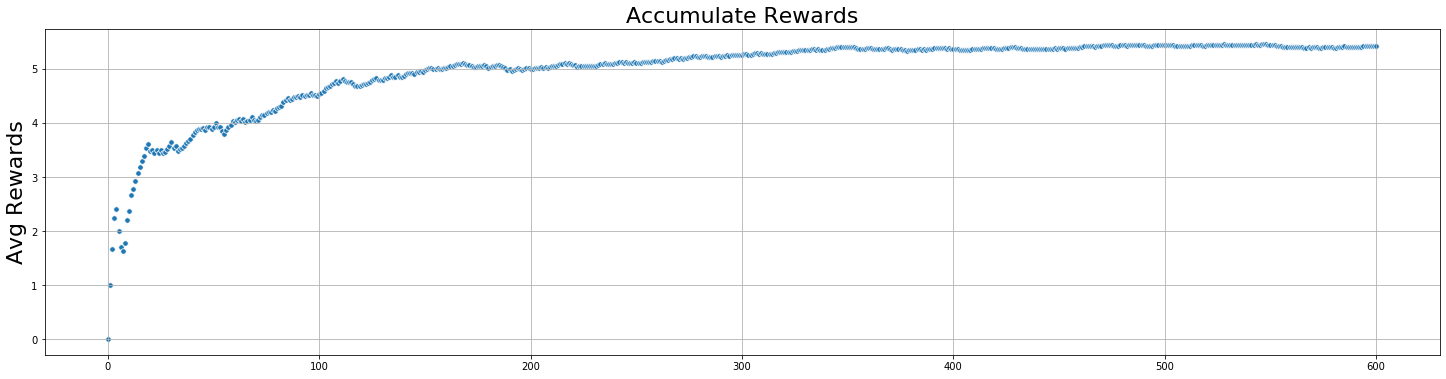
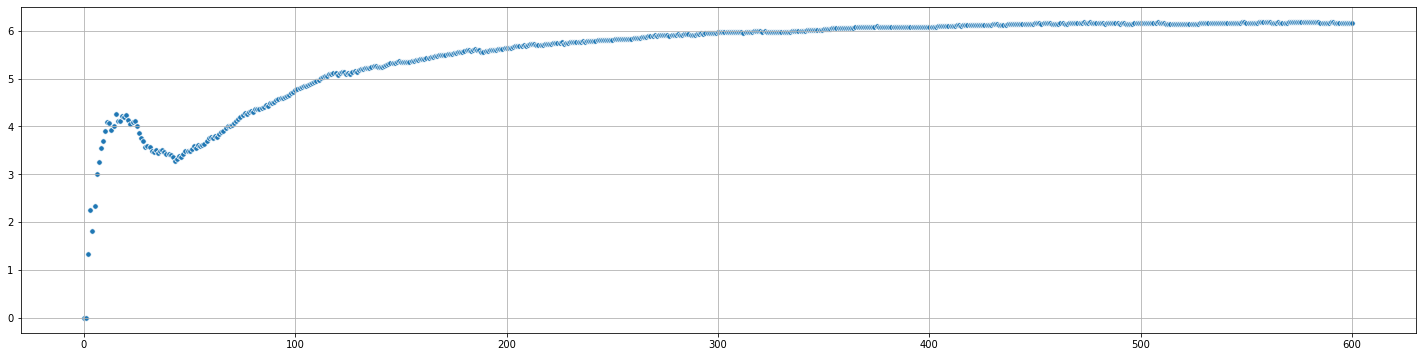
Argmax : 累计平均奖励的变化
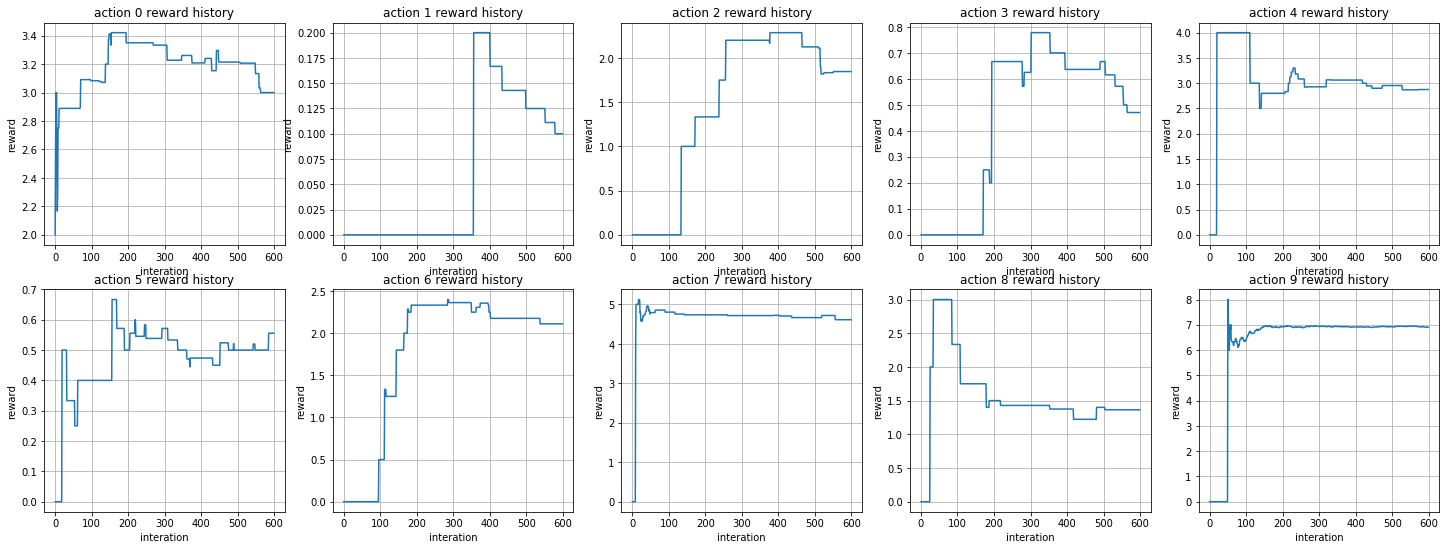
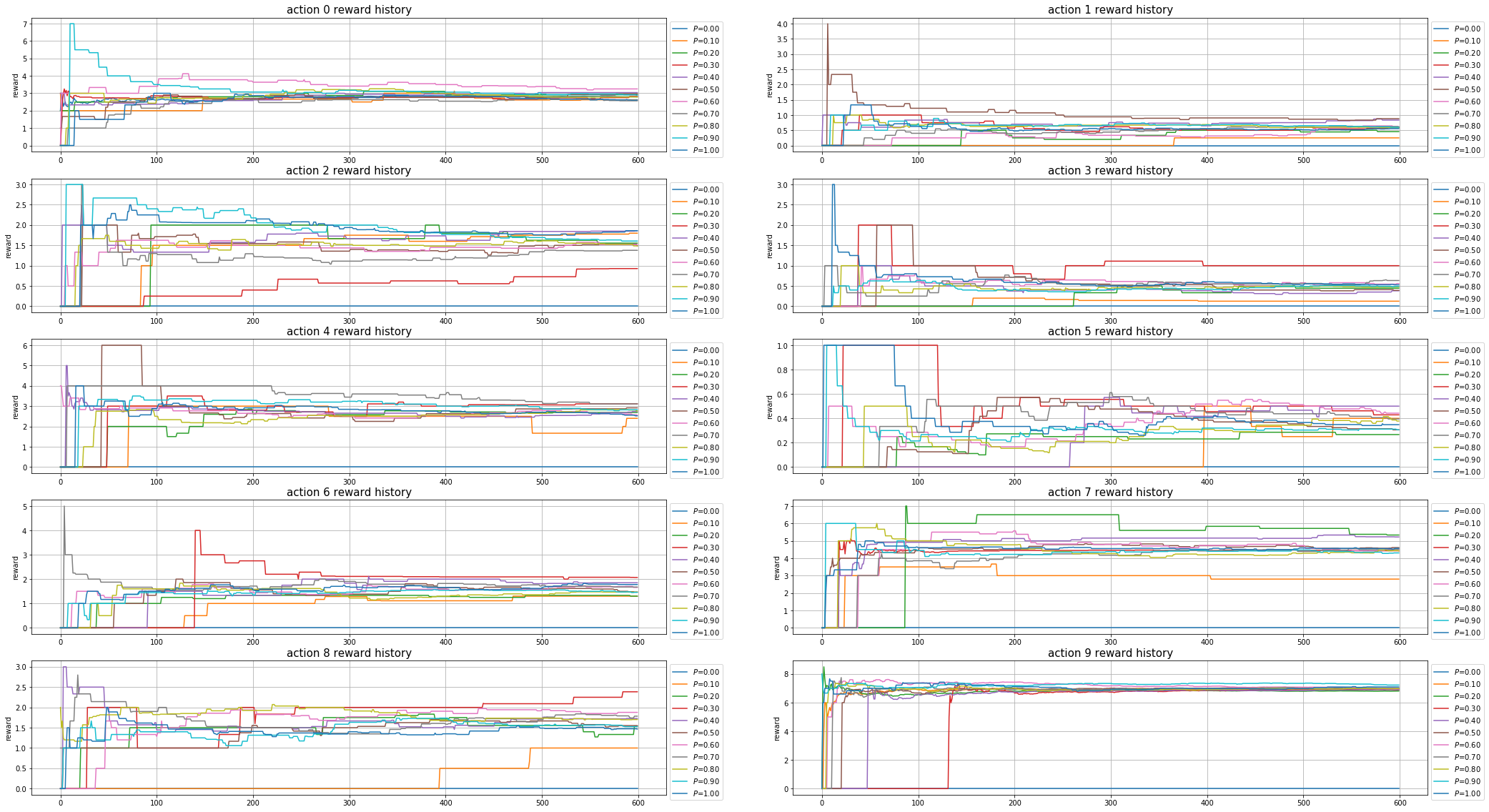
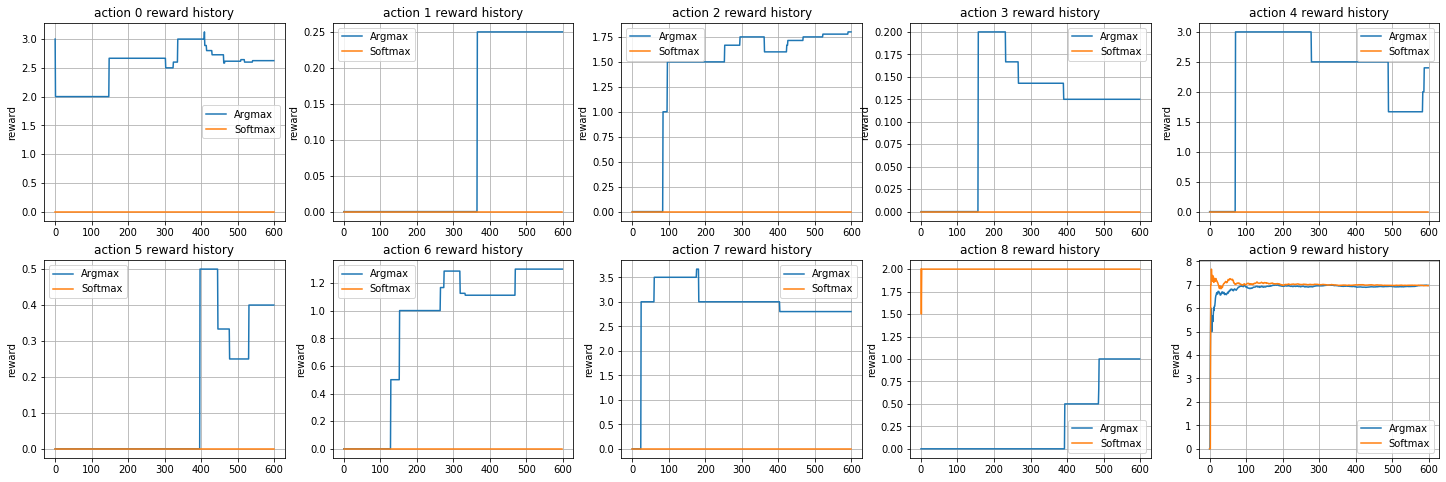
Argmax : 每个动作reward的变化
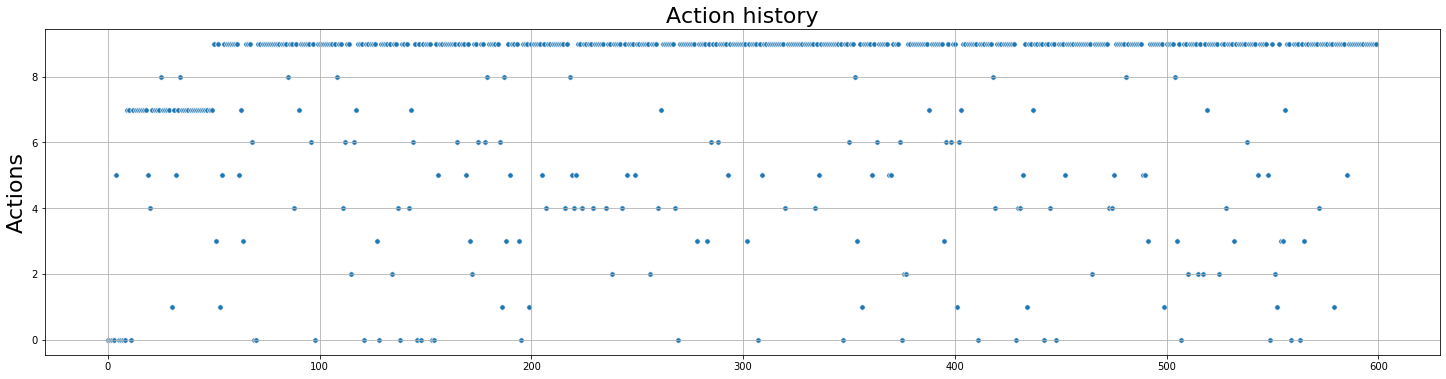
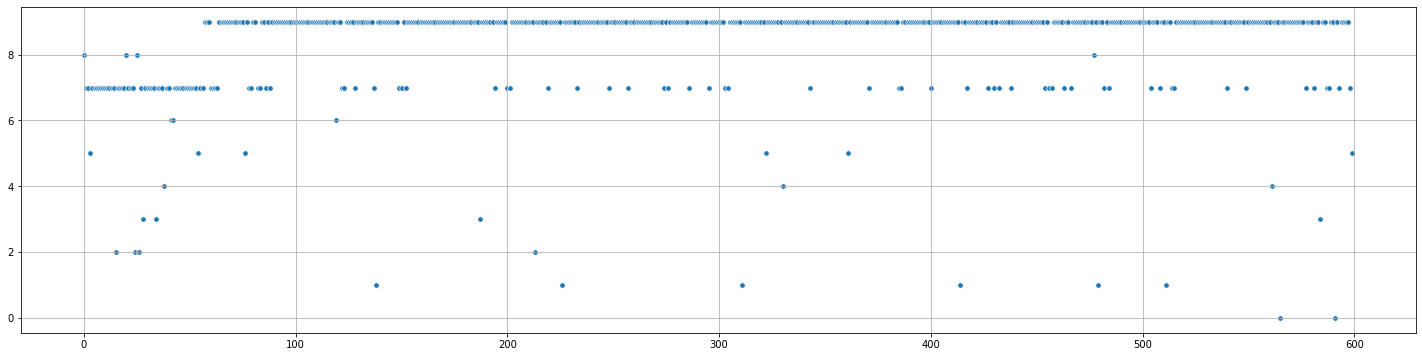
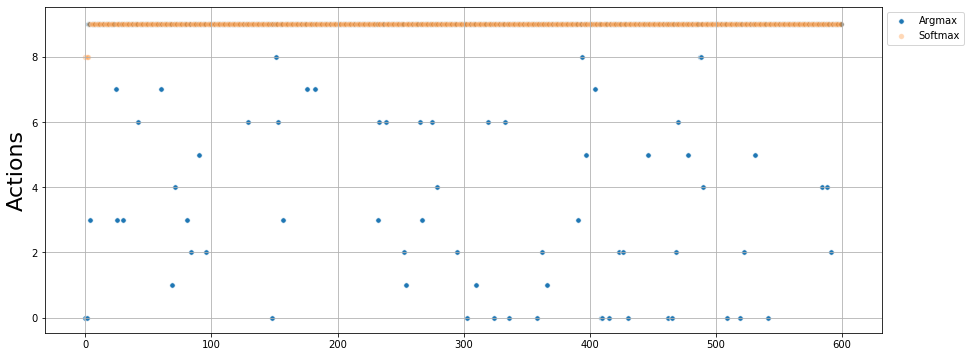
Argmax : 动作选择的变化
softmax选择策略
由上面的结果,我们可以发现,随着游戏的次数增加,累计的平均回报也在不断增加,每个动作的奖励也逐渐趋于稳定,从动作选择的变化来看,被选择次数最多的就是 a 9 a_9 a9 ,从累计平均回报看,在游戏500次之后,已经趋于稳定了,但是动作选择策略仍会在进行随机选择,其实这个时候已经没有必要了,因为最优的动作已经被发现了,我们只用重复执行这一个动作就行了.我们需要一个新的动作选择策略,确保每次不选择最差的动作,但仍具有探索未知动作的能力。softmax刚好就满足这个需求,softmax不是在探索过程中随机选择一个动作,而是为我们提供了各种选择的概率分布。概率最大的选项等同于上面的最佳动作.
softmax方程:
P r ( a ) = e Q k ( a ) / τ ∑ i = 1 n e Q k ( a i ) / τ Pr(a) = frac{e^{Q_k(a)/ tau}}{sum_{i=1}^n e^{Q_k(a_i) / tau}} Pr(a)=∑i=1neQk(ai)/τeQk(a)/τ
- P r ( a ) Pr(a) Pr(a) : 接受动作的值,返回动作分布概率
- τ tau τ : 调节参数,过大会是动作间的概率分布相似,过小会使动作之间的分布差异过大
def softmax(av, tau=1.11):
softm = ( np.exp(av / tau) / np.sum( np.exp(av / tau) ) )
return softm
p = softmax(record[:,1],t) # 动作概率分布
choice = np.random.choice(np.arange(n),p=p)
softmax()选择:累计回报的变化
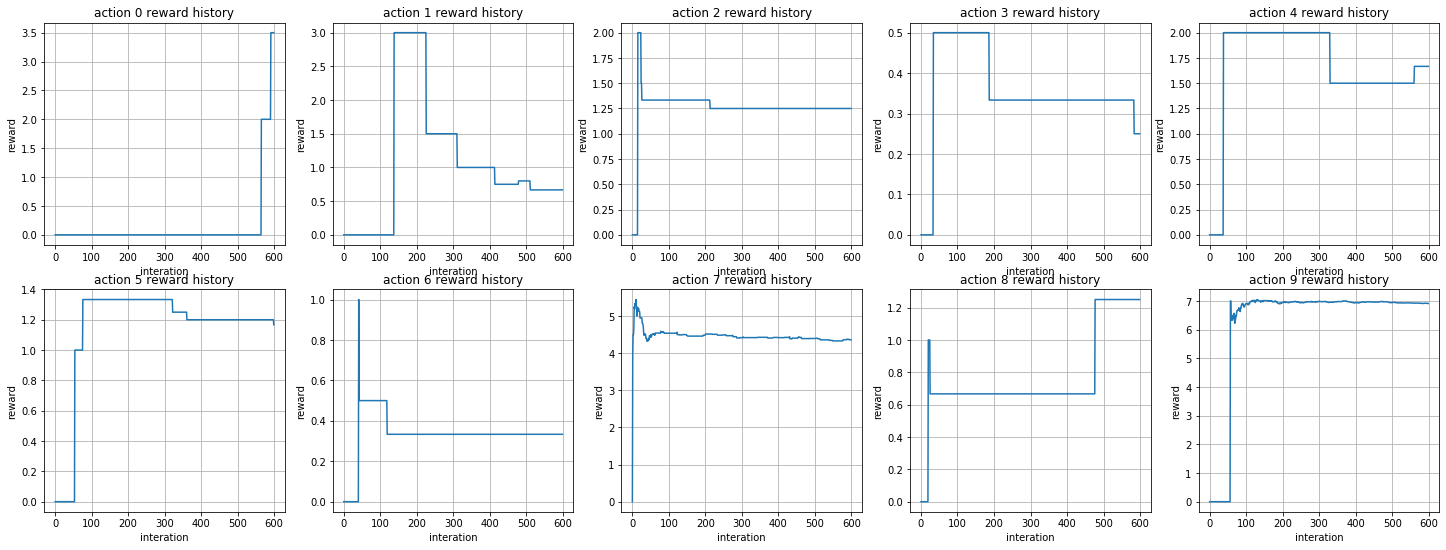
softmax : 每个动作的reward变化
Softmax : 动作选择的变化
从上面的结果来看,softmax()动作选择函数,收敛更快,对动作的选择更加集中.
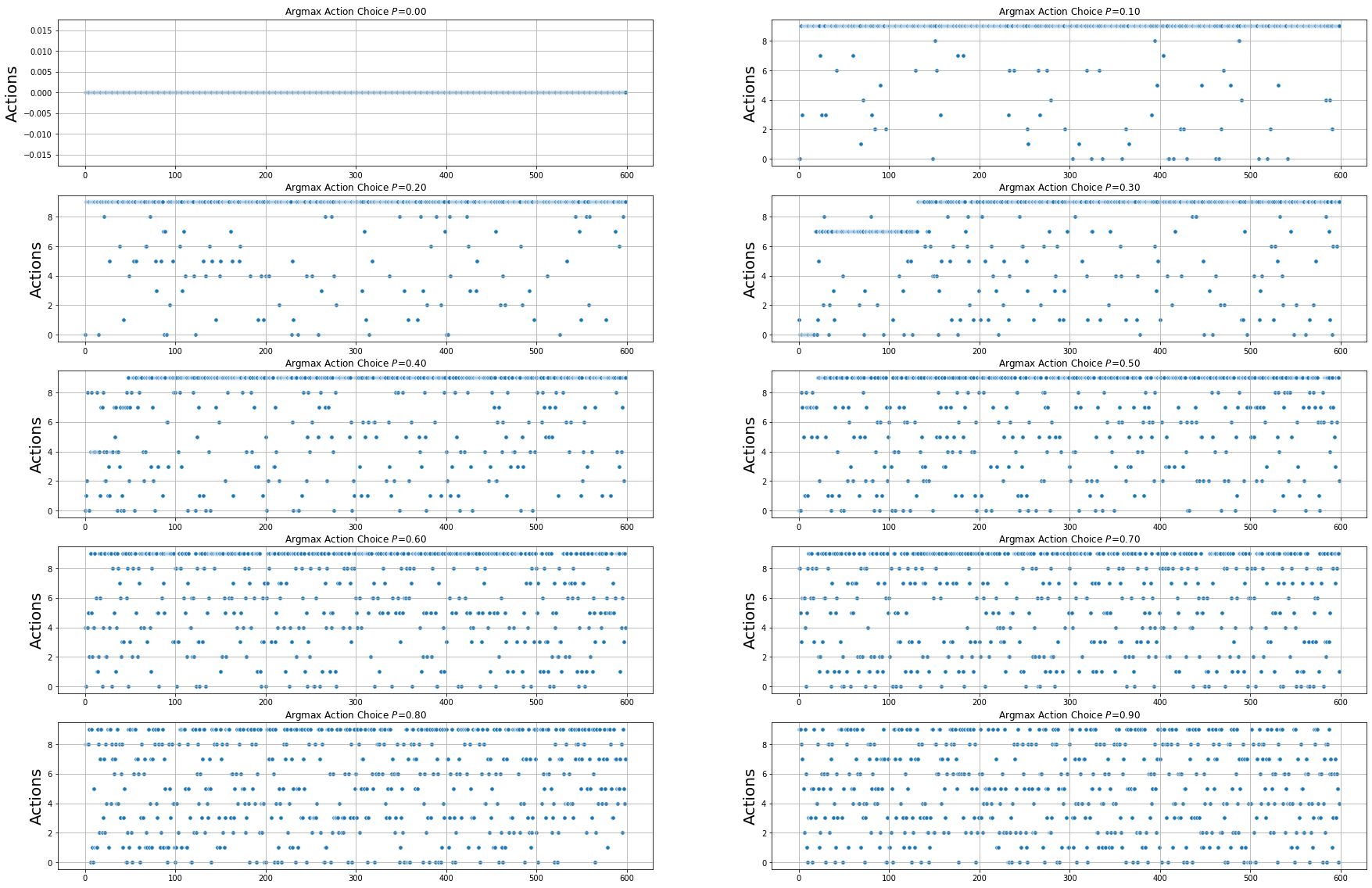
Argmax : 不同 P P P 值的影响
- P ∈ [ 0 , 1 ] P in [0, 1] P∈[0,1]
Argmax : 不同 P P P 值对rewards的影响
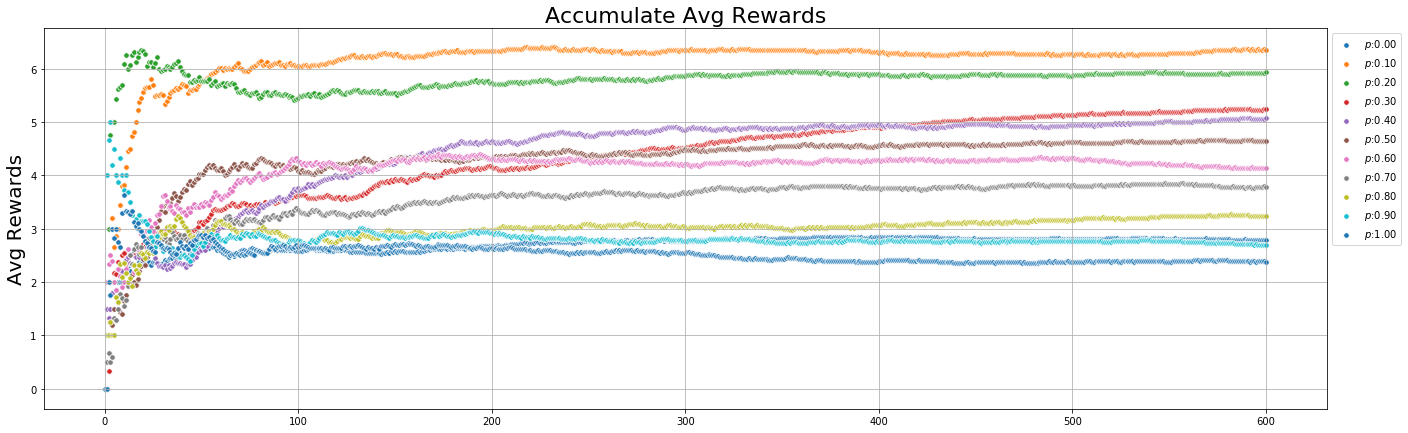
观察上图可知:
- P P P 在取值在两个极端的时候[0, 1]效果最差的
- P P P 然后从0.1~0.9递减
Argmax : 不同 P P P 值对records的影响
Argmax : 不同 P P P 值对Actions的影响
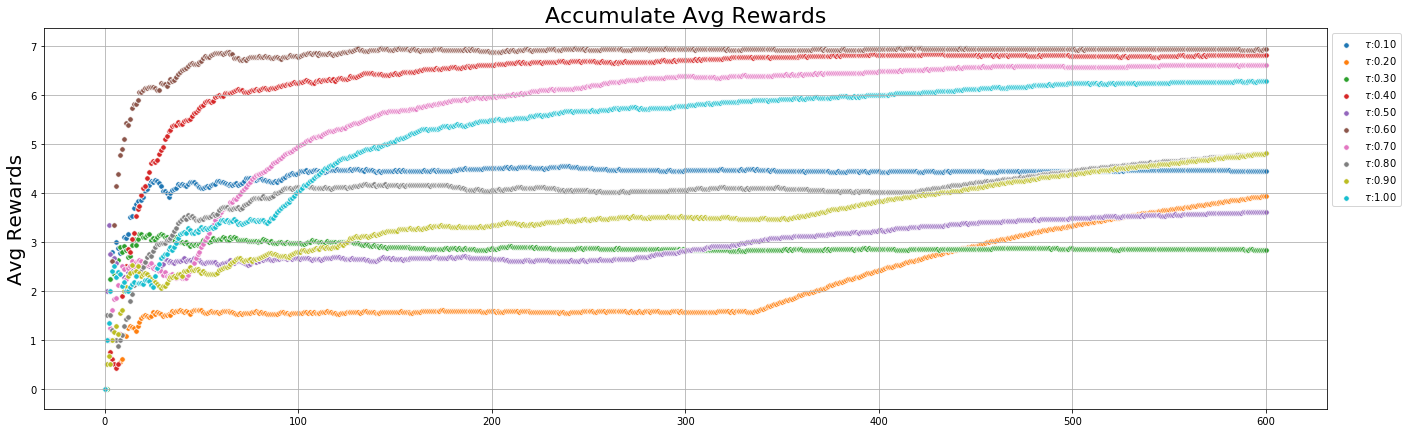
Softmax : 不同 τ tau τ 值的影响
- τ ∈ [ 0.1 , 1 ) tau in [0.1, 1) τ∈[0.1,1)
Softmax : 不同 τ tau τ 值对rewards的影响
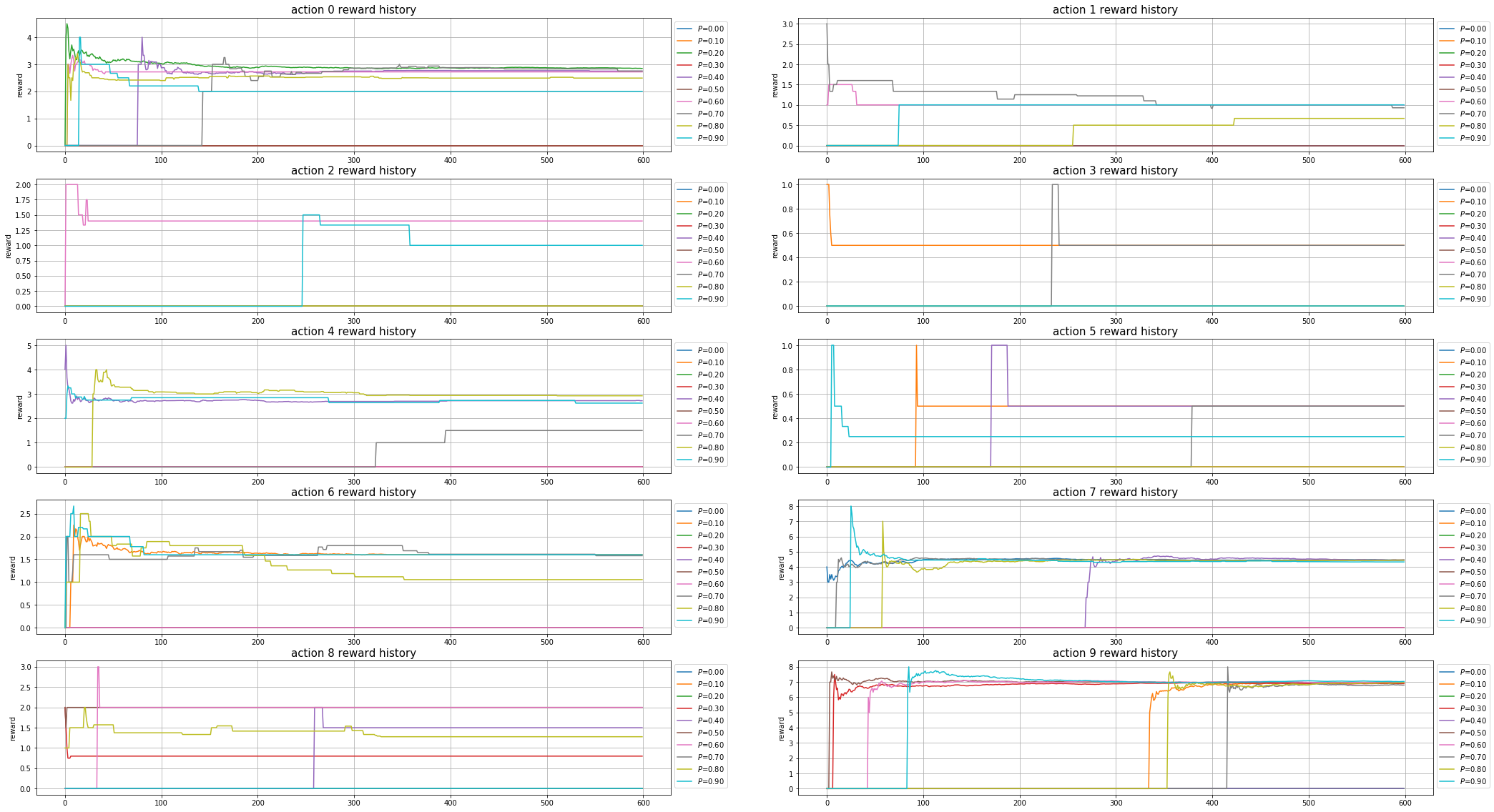
Softmax : 不同 τ tau τ 值对records的影响
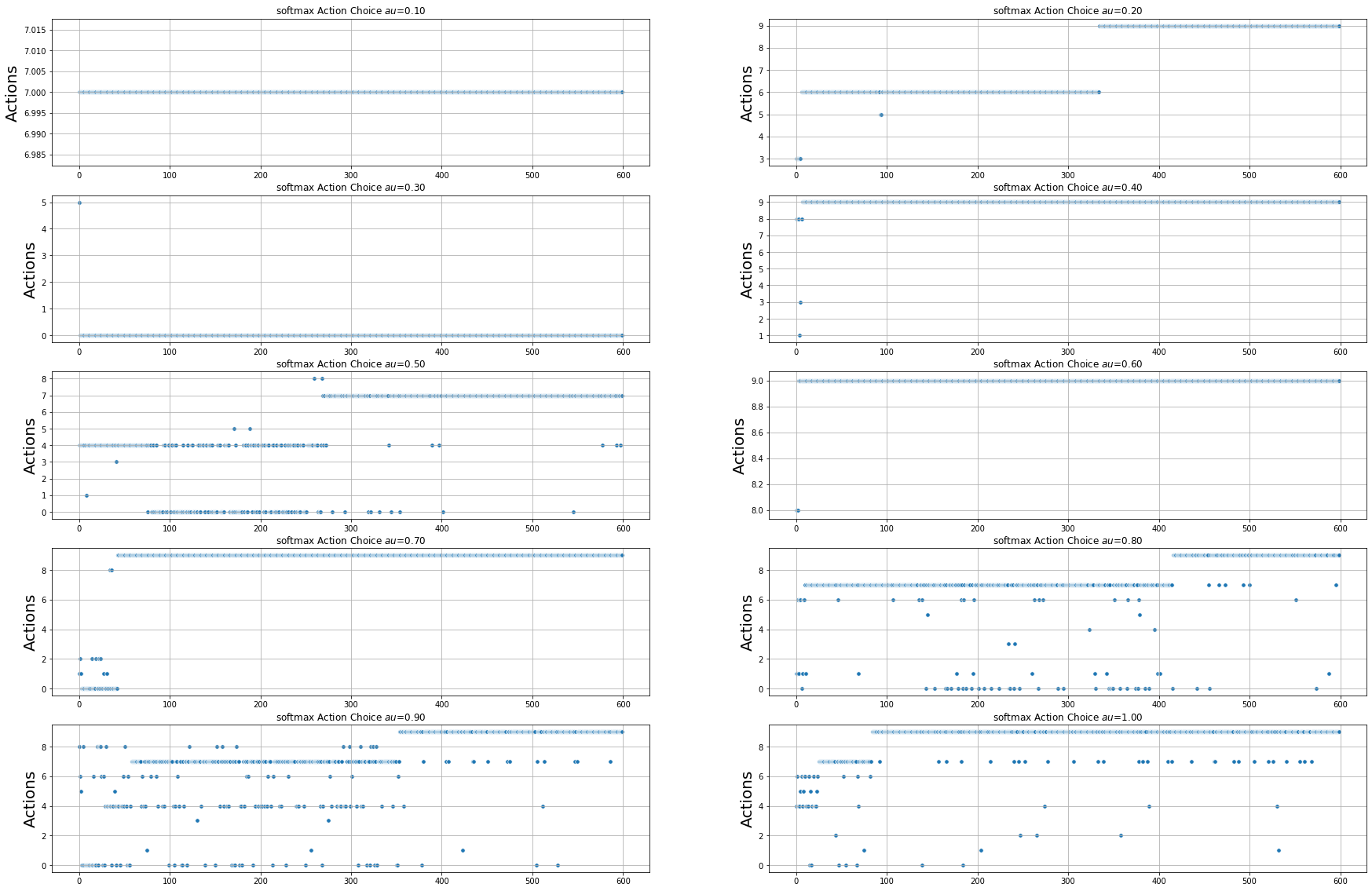
Softmax : 不同 τ tau τ 值对Actions的影响
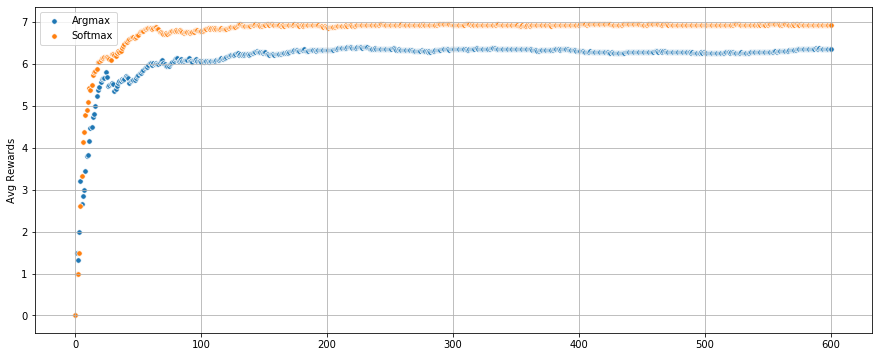
Final, Softmax Vs Argmax
- Best Argmax : P = 0.1 P = 0.1 P=0.1
- Best Softmax : τ = 0.6 tau = 0.6 τ=0.6
Accumlate rewards
Records history
Actions
总结:
- softmax可以更快的收敛,但是 τ tau τ 敏感,需要花时间找到最佳的 τ tau τ 值
- argmax收敛的相对较慢,但是
P
P
P 值的选择比较直观
- P = 0 o r 1 P = 0 or 1 P=0or1,效果是最差的
- p [ 0.1 , 0.9 ] p ~ [0.1, 0.9] p [0.1,0.9],最终的累计回报是递减的
- 但是如果限制游戏的次数,适当的增加冒险的概率,可以更快的获得更高的奖励
最后
以上就是体贴马里奥最近收集整理的关于DRL实战 : N-Armed Bandits问题的全部内容,更多相关DRL实战内容请搜索靠谱客的其他文章。








发表评论 取消回复