我是靠谱客的博主 务实水杯,这篇文章主要介绍经典视觉SLAM框架视觉里程计后端优化回环检测建图度量地图(Metric Map)拓扑地图(Topological Map),现在分享给大家,希望可以做个参考。
引言:通过前面的推送我们已经对SLAM有了个大体的认识。(初识视觉SLAM)下面来看经典的视觉SLAM框架,了解一下视觉SLAM究竟由哪几个模块组成。
本文选自《视觉SLAM十四讲:从理论到实践》。
整体视觉SLAM流程图。
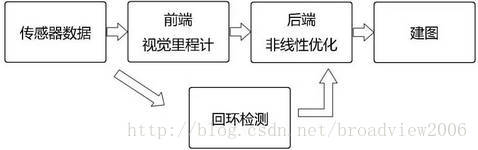
整个视觉SLAM流程包括以下步骤。
- 传感器信息读取。在视觉SLAM中主要为相机图像信息的读取和预处理。如果是在机器人中,还可能有码盘、惯性传感器等信息的读取和同步。
- 视觉里程计(Visual Odometry,VO)。视觉里程计的任务是估算相邻图像间相机的运动,以及局部地图的样子。VO又称为前端(Front End)。
- 后端优化(Optimization)。后端接受不同时刻视觉里程计测量的相机位姿,以及回环检测的信息,对它们进行优化,得到全局一致的轨迹和地图。由于接在VO之后,又称为后端(Back End)。
- 回环检测(Loop Closing)。回环检测判断机器人是否到达过先前的位置。如果检测到回环,它会把信息提供给后端进行处理。
- 建图(Mapping)。它根据估计的轨迹,建立
最后
以上就是务实水杯最近收集整理的关于经典视觉SLAM框架视觉里程计后端优化回环检测建图度量地图(Metric Map)拓扑地图(Topological Map)的全部内容,更多相关经典视觉SLAM框架视觉里程计后端优化回环检测建图度量地图(Metric内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复