文章目录
- 前言
- 总结
前言
移动机器人的具体组成部分如下图所示,分为硬件组成部分和软件组成部分。硬件组成主要包括执行机构、驱动机构、传感系统和控制系统四部分,控制系统部分采用分层结构进行设计,软件组成包括ROS上位机软件设计与STM32下位机软件设计两部分。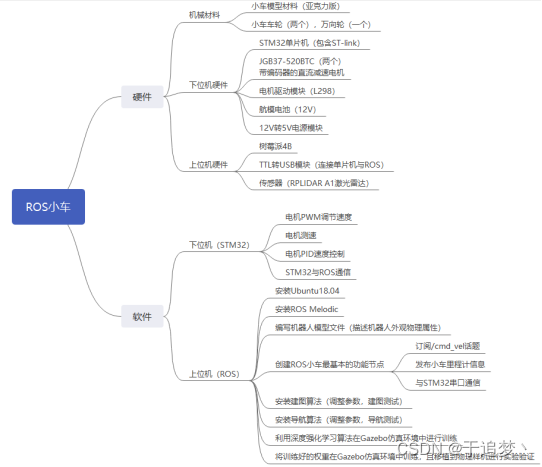
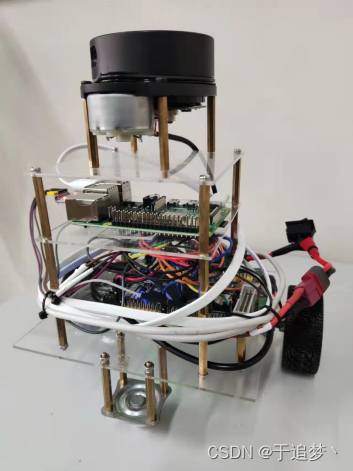
本文设计的移动机器人如下图所示,底盘结构为差速轮式移动机器人,能够实现原地旋转的功能,由亚克力板进行整体架构制作,机器人前方采用一个万向轮,后方采用由直流电机作为执行机构的差速轮。最上层安装激光雷达RPLIDAR A1,用于感知环境信息,便于路径规划算法使用;中间层安装树莓派,便于与激光雷达连接、与STM32连接;最底层安装STM32、L298逻辑电机驱动模块、航模电池、12V转5V降压模块,便于驱动直流电机的运动。
总结
由于是直接购买的STM32的开发板和L298逻辑的电机驱动模块,所以布线有点乱,后需如果有机会,可以自行设计一块板子,从而使布线更为简单。下一篇文章将详细介绍各个硬件以及各硬件之间的连接关系。

欢迎大家关注微信公众号:深度学习与路径规划
最后
以上就是怡然汽车最近收集整理的关于移动机器人软硬件组成前言总结的全部内容,更多相关移动机器人软硬件组成前言总结内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。





![[工程经验] 一个完整控制系统所需要的软件框架(上位机)](https://www.shuijiaxian.com/files_image/reation/bcimg24.png)


发表评论 取消回复