▌一、 赛题背景
近年来,随着人工智能特别是深度学习的发展,如何通过自学习 实现避障已成为一大研究热点。实现自主学习是机器人实现智能化的重要一步,有利于改善其行为策略,提高在未知复杂的环境中的适应 性。卷积神经网络是一种有监督的特征学习方法,可以从大规模数据 中学习到相应的特征。将深度卷积神经网络应用在相应的领域与移动机器人相结合,为机器人赋予移动大脑,实现智能感知、智能决策。
本赛项的设立能够场景化的复现基于深度学习的智能车在实际领域中的应用,尤其是在无人的环境中,实现数据采集、数据模型构 建、自主识别弯道、无人驾驶验证等多种技术融合的场景。将深度学习技术赋予机器智能行为,为培养创新综合人才提供演练平台,以赛促教,拓宽高校人工智能相关专业的教学内容,提升高校人工智能科技创新能力和人才培养能力。
▌二、 比赛赛题
本组别比赛由两个比赛科目构成:分别是:竞速追踪和智能交通,两科目的成绩之和,作为本组别的总成绩。
科目一:如影随形
赛题描述:在比赛区域的起点和终点之间,随机放入了大量锥桶(如下图红色圆圈标志)。比赛开始时,参赛队员从起点跑到终点,车模跟随参赛队员,车模在运行过程中需要跟随参赛队员运行,最快到达终点且中途没有触碰锥桶的队伍获胜。
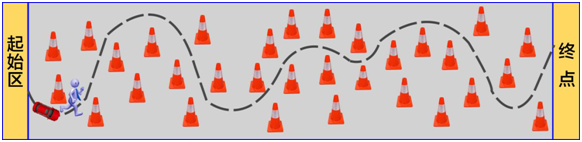
赛道长度30米
判罚规则:
1、车模在比赛途中每碰触一次锥桶,加罚10s
2、车模运行时没有跟随队员运行轨迹,加罚100s
3、车模中途运行停止记比赛失败
科目一的比赛成绩T1为:从起点到终点运行时间+加罚时间。
T1时间越小,代表运行更快,成绩越好。
科目二:智能交通
赛题描述:
比赛开始时,无人车从起点出发,沿着车道线行驶、运行途中需要识别红绿灯,直行标志,限速路段,左右拐弯标志,行驶2圈,最后返回至终点(同起点位置),在遵守交通规则的情况下,用时最短者获胜。
具体如下图所示:
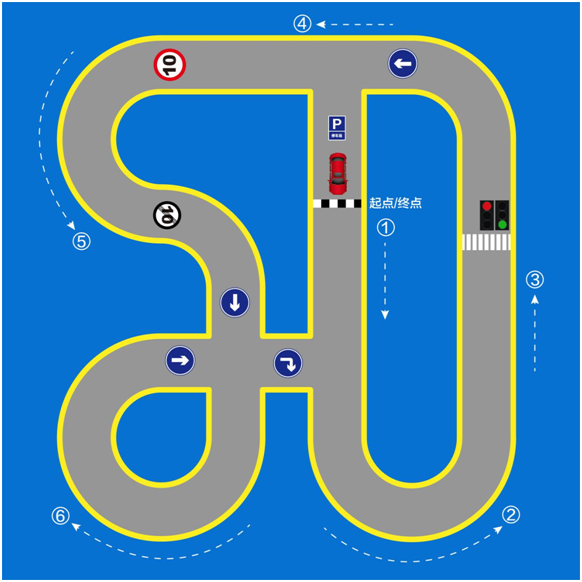
赛道参考图示
无人车识别红灯后,应在斑马线前停留2秒,待红等变绿灯后再行驶;比赛过程中无人车未识别红灯或者识别红灯后,停留时间少于2秒,则加罚10秒。
规则说明:
1)无人车识别红灯后,应在斑马线前停留2秒,待红等变绿灯后再行驶;比赛过程中无人车未识别红灯或者识别红灯后,停留时间少于2秒,则加罚10秒。关于红绿灯说明:在无人车运行2圈的过程中,会有随机一圈看到的是红灯,另外一圈看到的是绿灯。
2)在限速标志和取消限速标志这段赛道中,无人车应按照XX速度行驶,如果在此限速路段超过这个速度运行,加罚10秒。
3)需要识别直行标记 ,在这种赛道中,无人车需要直行,如果拐弯等违规现象,加罚10秒。
4)无人车在最后一圈运行时,赛道中的右转标志 ,会自动变成左转标志 ,无人车左转后进入停车区域(原起点位置)。无人车到达终点停车时,需要越过终点线,同时需要在停车标志前停车,如果触碰停车标志或者未越过终点线,加罚10秒。 (停车标志牌可以用超声波检测)
5)车模越过边线冲出赛道(四个车轮都在赛道外)或者中途运行停止,或运行路线错误,计比赛失败。
6)车模在比赛过程中受到人为干预(发送启动命令除外),计此次 成绩无效。
科目二的比赛成绩T2为:从起点到终点运行2圈的时间+加罚时间。
T2越小,代表运行更快,成绩越好。
比赛总成绩
本组别比赛总成绩为科目一成绩加上科目二成绩。即总成绩T=T1+T2 (T越小,代表运行更快,成绩越好)
参赛要求:
软件方面要求:需要利用"飞桨"深度学习框架(官网www.paddlepaddle.org.cn/)及AIstudio平台进行开发。参赛队员需要利用"飞桨"深度学习框架训练并识别车道线、红绿灯等标志,限速牌等标记。
硬件方面要求:使用赞助商提供的免费M型车模进行开发,无需制作电路板。
具体车模参数配置如下:
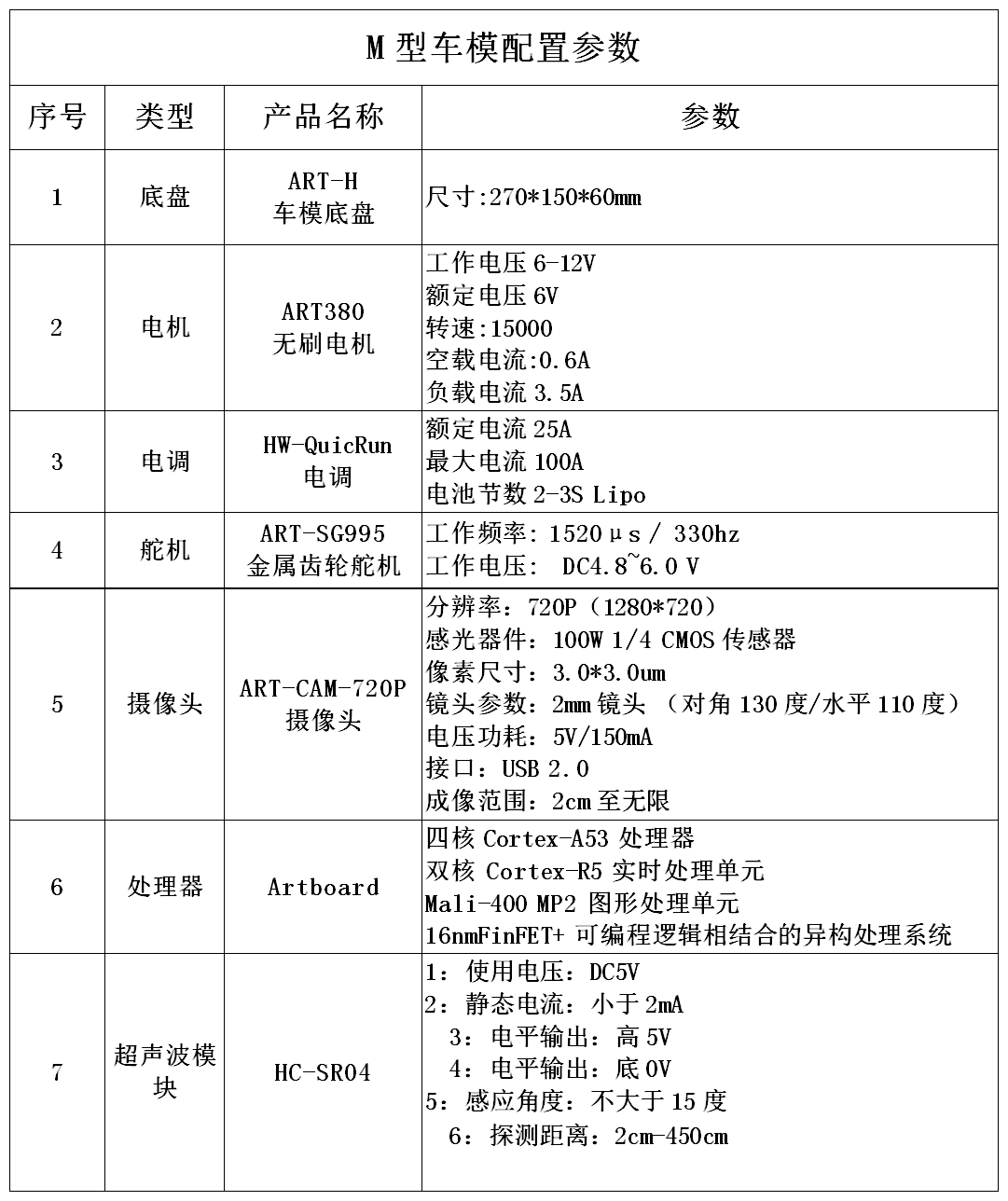
车模参数配置
▌三、 参赛设备获取
由于本次挑战赛采用的计算平台和传感器相对传统竞速车模价格高昂,同时也为了避免部分高校在零部件上烧钱比拼性能,考虑到大赛的公平性以及比赛设备的价格问题,由大赛组委会统一提供100台标准智能无人车用于竞赛,委托赞助合作公司统一发放,在参加完竞赛后统一归还。
参赛车模获取方式如下:
参加百度"飞桨"线上预选赛,前100名获得参赛车模。
预选赛网站
参赛链接:
https://aistudio.baidu.com/aistudio/competition
未获得免费车模的同学如果对本竞赛比较感兴趣,可以联系赞助合作公司进行购买。
最后
以上就是甜蜜秀发最近收集整理的关于第15届全国大学生智能汽车竞赛 人工智能挑战赛(百度)▌一、 赛题背景▌二、 比赛赛题▌三、 参赛设备获取的全部内容,更多相关第15届全国大学生智能汽车竞赛内容请搜索靠谱客的其他文章。








发表评论 取消回复