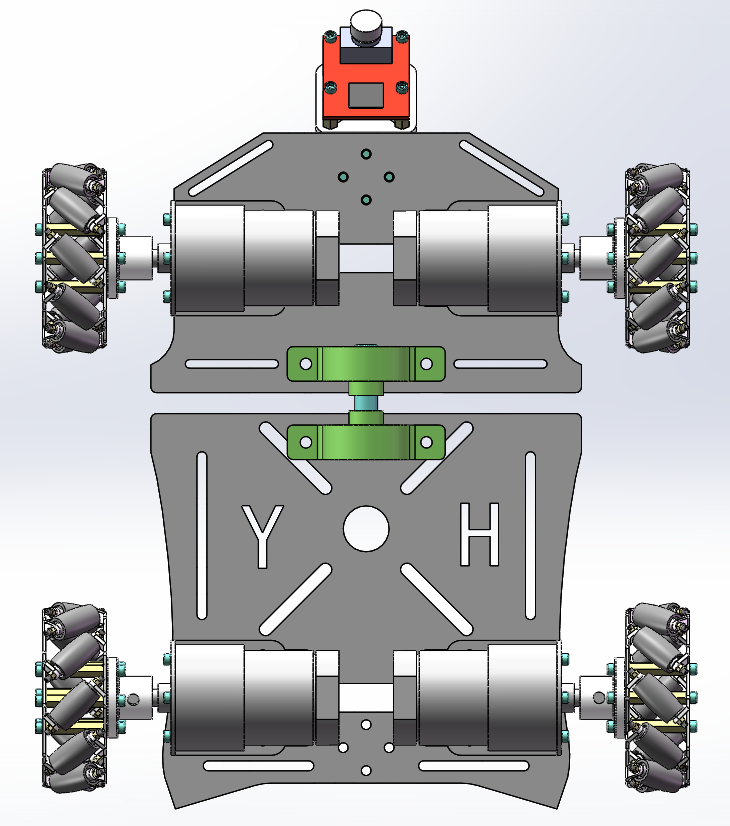
0.1 麦克纳姆轮底盘示意图
0.2 运动学逆解概念
-逆运动学是决定要达成所需要的姿势所要设置的关节可活动对象的参数的过程。
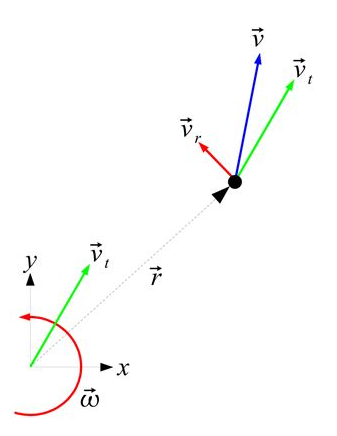
一、 底盘运动的分解
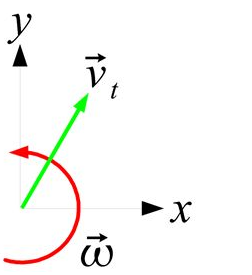
我们知道,刚体在平面内的运动可以分解为三个独立分量:X轴平动、Y轴平动、yaw 轴自转。如下图所示,底盘的运动也可以分解为三个量:
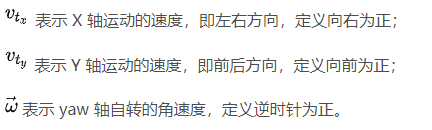
以上三个量一般都视为四个轮子的几何中心(矩形的对角线交点)的速度:
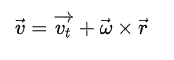
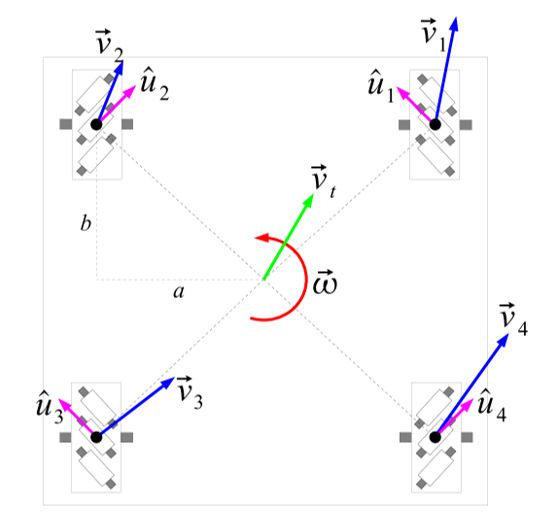
二、计算出轮子轴心位置的速度
定义:
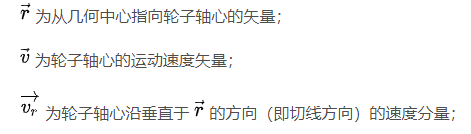
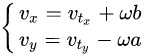
那么可以计算出:
分别计算 X、Y 轴的分量为:
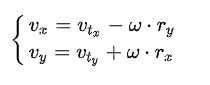
同理可以算出其他三个轮子轴心的速度:
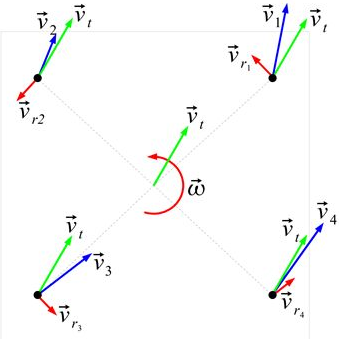
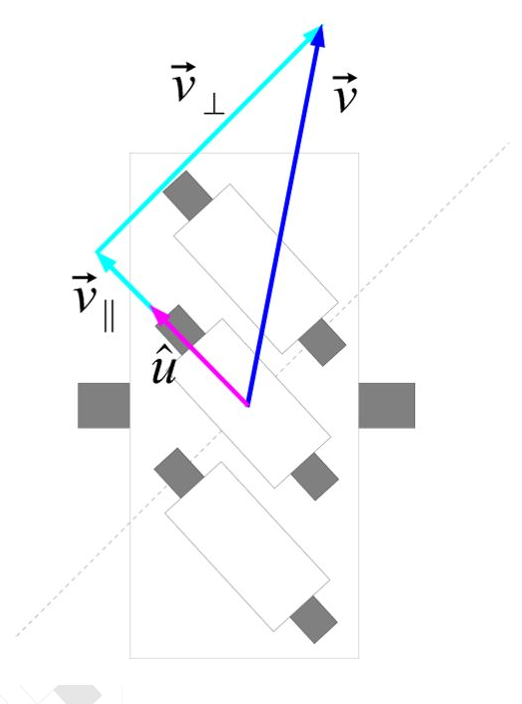
三、计算辊子的速度
车轮的速度矢量可以分为两个速度分量,一个是垂直于车辊的速度矢量,一个是平行于车辊的速度矢量,由于车辊中轴是自由运动的,所以垂直于车辊的速度矢量会直接作用在车辊的中轴上,提供车辊绕中轴旋转的角速度,所以这个垂直于车辊的速度对小车整体来讲并没有贡献。于是我们就只需要关注平行于车辊的速度矢量。从而得到一下式子:

其中u是沿辊子方向的单位矢量
四、计算轮子的速度
从辊子速度到轮子转速的计算比较简单:

根据上图所示的 a 和 b 的定义,有:
结合以上四个步骤,可以根据底盘运动状态解算出四个轮子的转速:
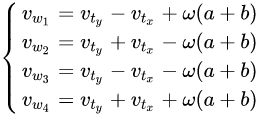
以上方程组就是长方形麦轮底盘的逆运动学模型,而正运动学模型可以直接根据逆运动学模型中的三个方程解出来,此处不再赘述。
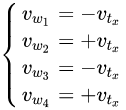
五、特殊情况
当底盘沿着 X 轴平移时:
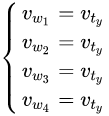
当底盘沿着 Y 轴平移时:
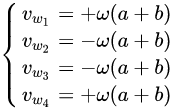
当底盘绕几何中心自转时:
传送门:https://blog.csdn.net/weixin_33859231/article/details/93697397?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522158479977419195239809389%2522%252C%2522scm%2522%253A%252220140713.130056874…%2522%257D&request_id=158479977419195239809389&biz_id=0&utm_source=distribute.pc_search_result.none-task
详情请关注亿航创客官方抖音账号:EhangGroup
最后
以上就是自由飞机最近收集整理的关于麦克纳姆轮(Mecanum Wheel)运动学分析的全部内容,更多相关麦克纳姆轮(Mecanum内容请搜索靠谱客的其他文章。








发表评论 取消回复