目录
- VS 2008 + Qt4.7 开发环境搭建
- △ 软件安装
- △ 环境配置
最近又开了个新坑,因为做实验的需求,需要用到重载机器人。
但是不巧的是,实验室的500kg库卡机器人程师兄在做开发,开发完成时间遥遥无期。。。
于是不得已只好拿起固高的机器人,算是把当年没完成的课补一补吧。
之前偷懒,有师弟给帮忙,做实验的时候都是等师弟把机器人调到最佳状态然后我再接收,现在师弟们毕业了,我的实验却还没有完成,没办法,只能自己上了。。。。
❤ 2022.10.20 ❤
固高的机器人控制器,从别人的使用评价来说,虽然比不上国外的成熟产品,但是在国内也算是排在前列吧。不过从使用者的角度来说,在不考虑成本和情怀的情况下,还是喜欢用更加成熟的产品。。。。
控制器用的(据说)是固高最新的科技结晶,R688,这个控制程序啊,居然是用高级语言编写的哦!!(哇!好厉害!),系统是winCE哦!(喔!),开发环境是vs2008+Qt4.7哦!(哦豁!好强!鼓掌!!!)
咳咳,虽然听起来版本是落后了点,但是工业设备嘛,主要得稳定可靠,功能嘛,够用就行。
虽然这么说,但是学了多年实验室祖传CoDeSys的人依然默默落泪。。。
其实关于固高的机器人控制器,我以前也是早有耳闻的,不过只知道固高的基于21131-3的定制版codesys内核的OtoStudio,不过那个也是基于很老的codesys2.3啦,至于换成高级语言开发,我觉得从某些角度来说,能够摆脱codesys框架的一些限制,但是对于一些很基础很成熟的功能,可能就得从零开始开发,所以算是增加了开发的难度,表现在使用过程中就是会出现很多bug。不过从另一方面来说,摆脱了国外软件的内核,坚持做自己的东西,在充分的迭代沉淀之后,固高的控制器应该就会有更强大的功能和更好的使用体验了吧。
虽然用起来不是那么顺手,但是也希望国产的机器人控制器能越做越好吧~
关于机器人本体,喏,就是这台振康的ZK500,500公斤机器人。
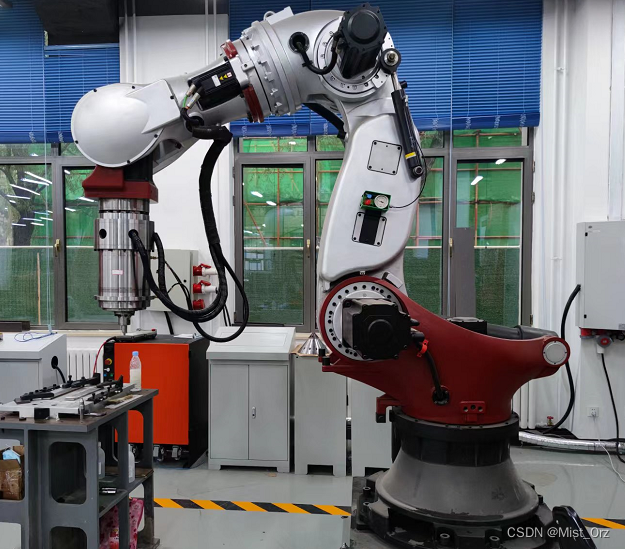
说起来还是挺佩服振康这家公司的,老板汤总真的是有情怀呀,RV减速器说搞起来就搞起来,作为一家民企敢想敢干,从没做过的500公斤机器人说干就干,有担当有魄力!
但是不得不说,在振康出差的这一段时间来看,相较于四大家族的机器人,国产机器人还是有很长的路要走的。
好了进入正题。
开发环境搭建以及演示案例来自固高《工业机器人控制系统_开发手册》(v2.0.9.0)的内容,我寻思固高的同志们既然把这个东西做出来,应该也是为了让更多的人能上手开发,所以我不算是泄露公司机密吧。
VS 2008 + Qt4.7 开发环境搭建
△ 软件安装
首先是安装软件
按照开发手册的内容,依次安装所需软件
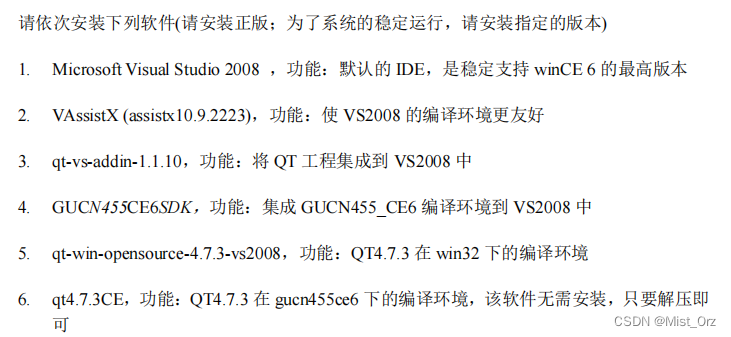
不得不说,这些软件的版本是真的够老的了,以至于很多在网上都找不到。。。还好有当年出差时备份的一部分和小伙伴的帮助,才找齐了这些需要的软件的对应版本。
其中,在安装 GUC_N455_CE6_SDK的时候遇到了一些问题

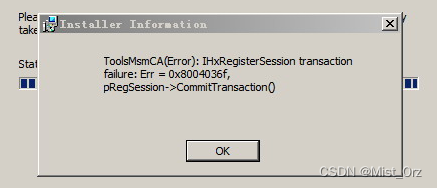
于是我百度了一下,大概知道了这个开发包是vs2008的CE开发包,出现这个错误的话也很好解决,如这个链接所以
→→→IHXFILTERS FILTER REGISTRATION FAILURE的解决方法
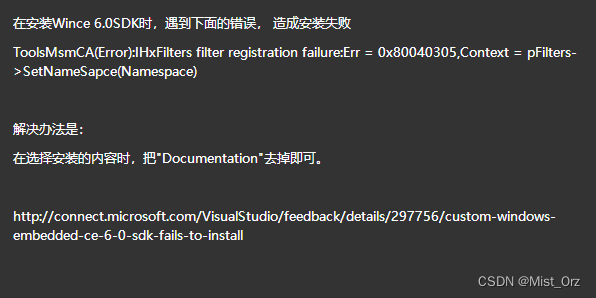
这个。。。问题是真的奇怪,解决方法也真是不讲道理。。。
终于装完了软件,下面开始配置环境。
❤ 2022.10.21 ❤
△ 环境配置
打开VS2008

新建一个工程
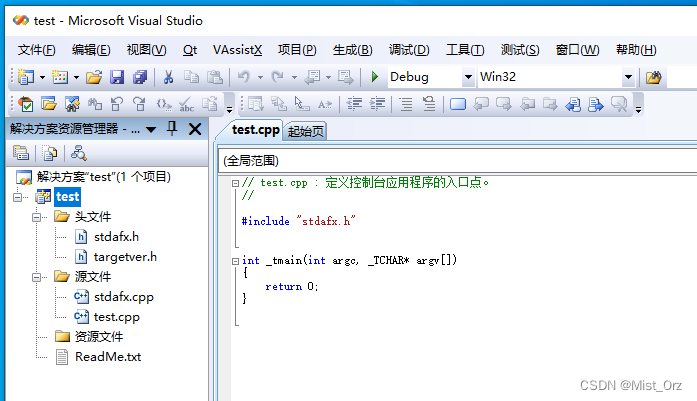
然后按照手册所说,在这里选择这个
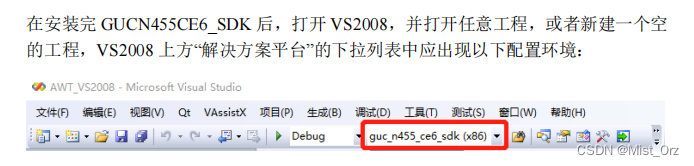
但是我这里并没有
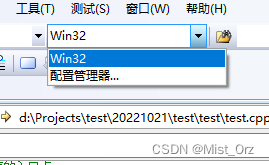
于是我点开配置管理器,发现得进行设置
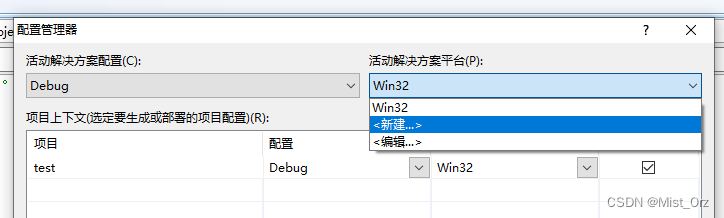
在这里新建
然后我猜应该是点这个
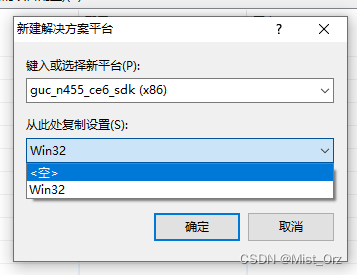
嗯 好了
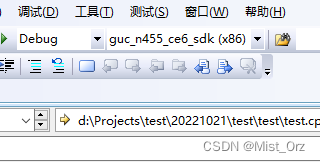
然后是配置Qt环境

依次点击之后,我遇到了问题
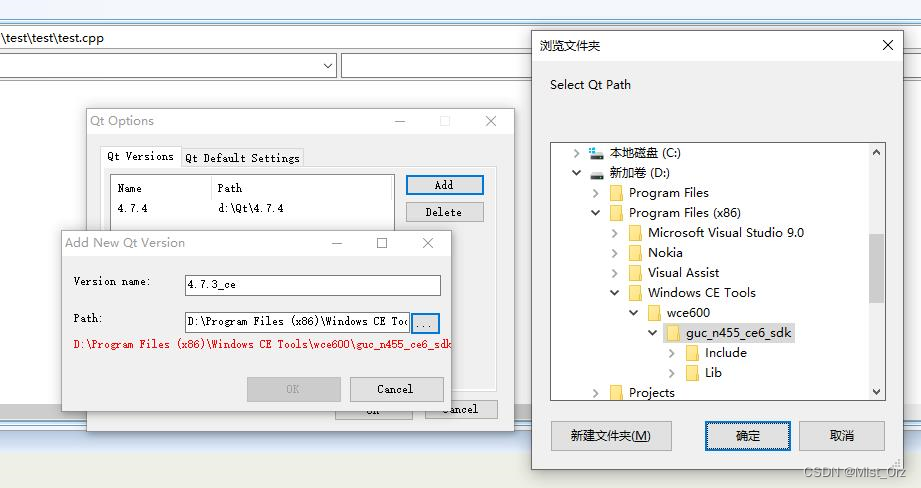
我把GUN_N455_CE6_SDK安装到了
最后
以上就是含蓄季节最近收集整理的关于固高机器人控制器开发笔记VS 2008 + Qt4.7 开发环境搭建的全部内容,更多相关固高机器人控制器开发笔记VS内容请搜索靠谱客的其他文章。








发表评论 取消回复