从零搭建麦轮小车
开源资料:https://github.com/Bungehurst/Car_Mecanum
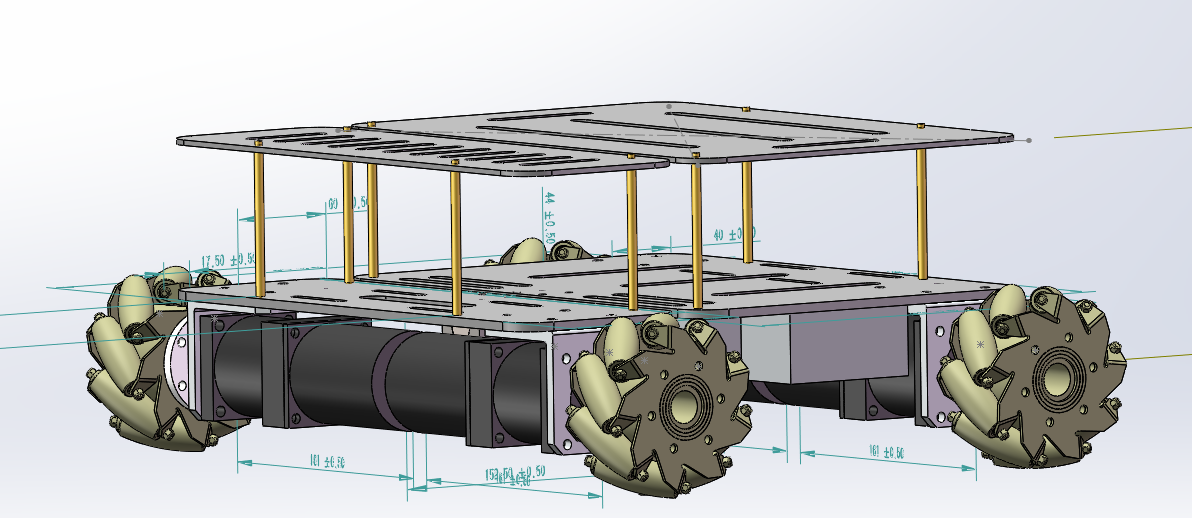
绘制3D模型(Solidworks建模)
全图
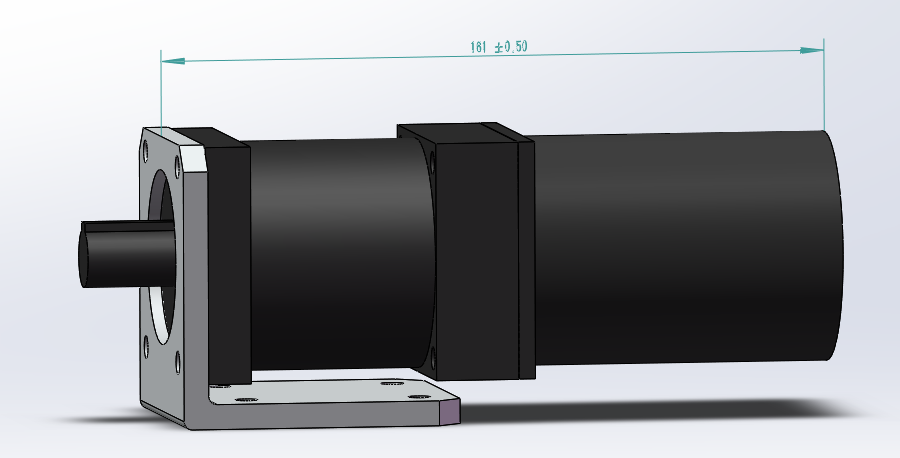
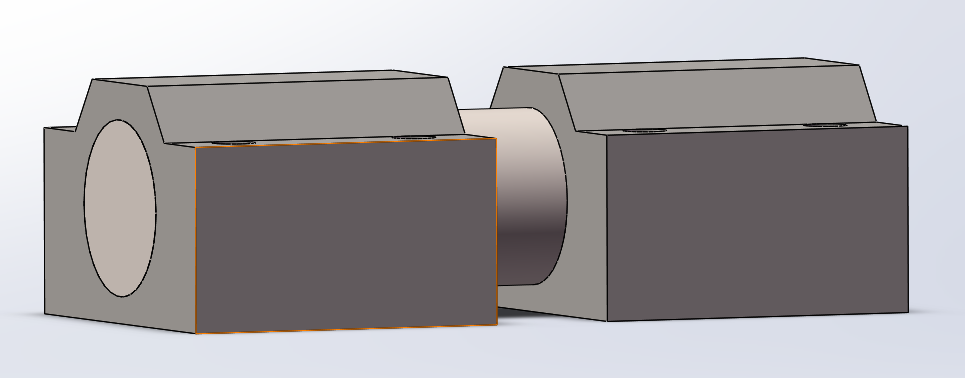
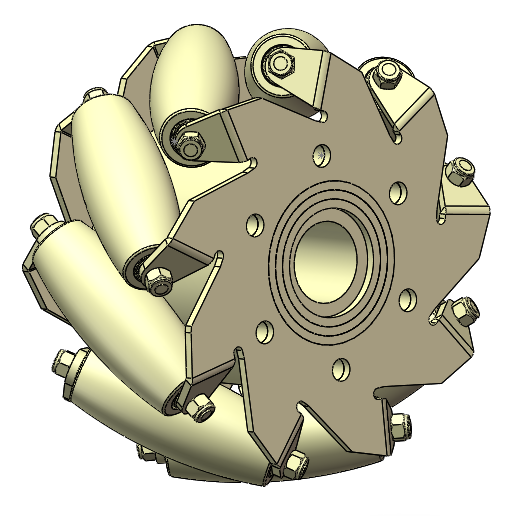
部件图
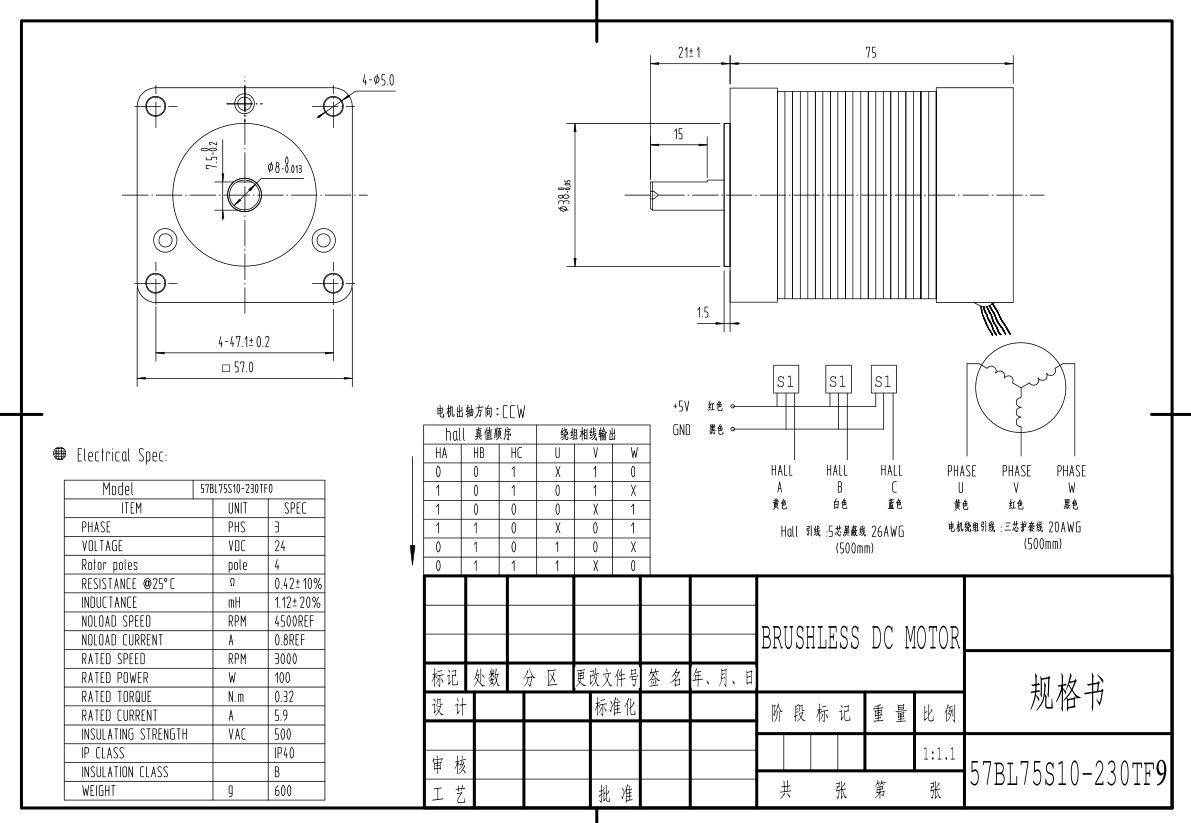
电机
共轴器
麦克纳姆轮
实物图

硬件电路搭建
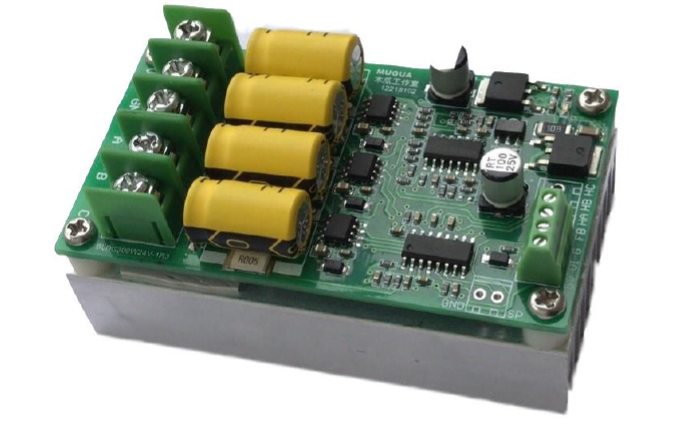
驱动器
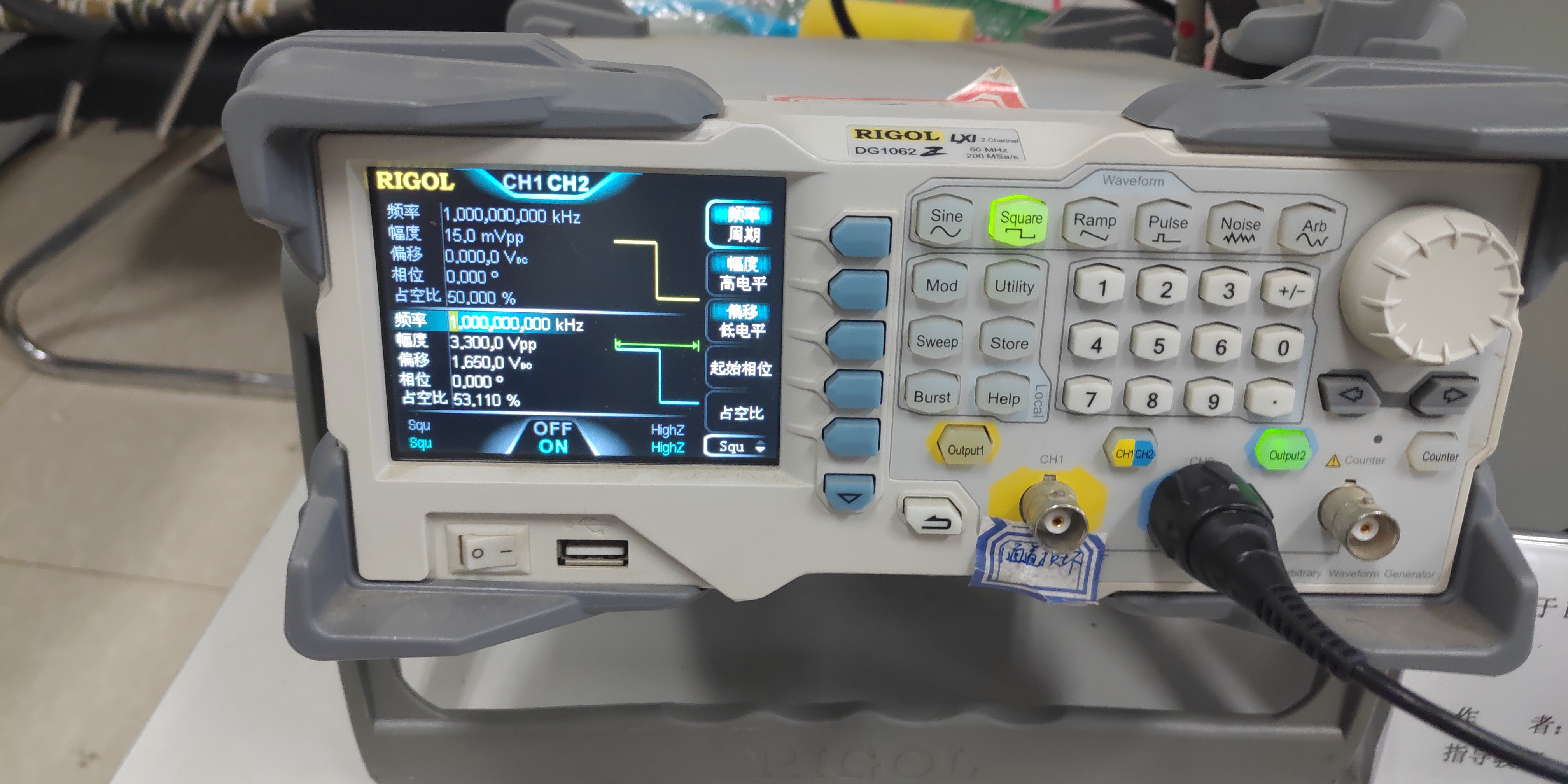
选用的是BLDC300W24V直流无刷控制器,有霍尔版本。通过PWM占空比控制速度
接线示意图
驱动器端
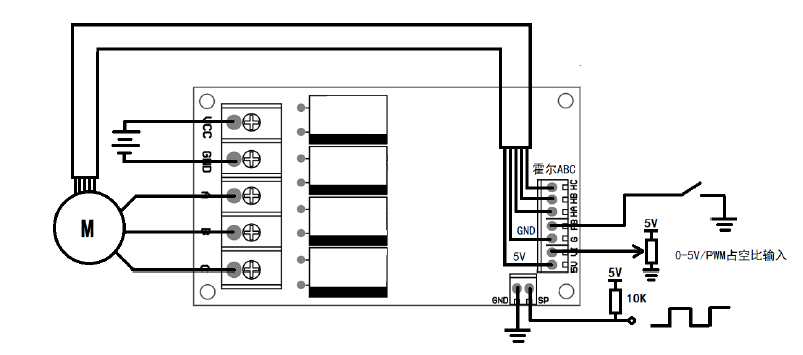
电机端
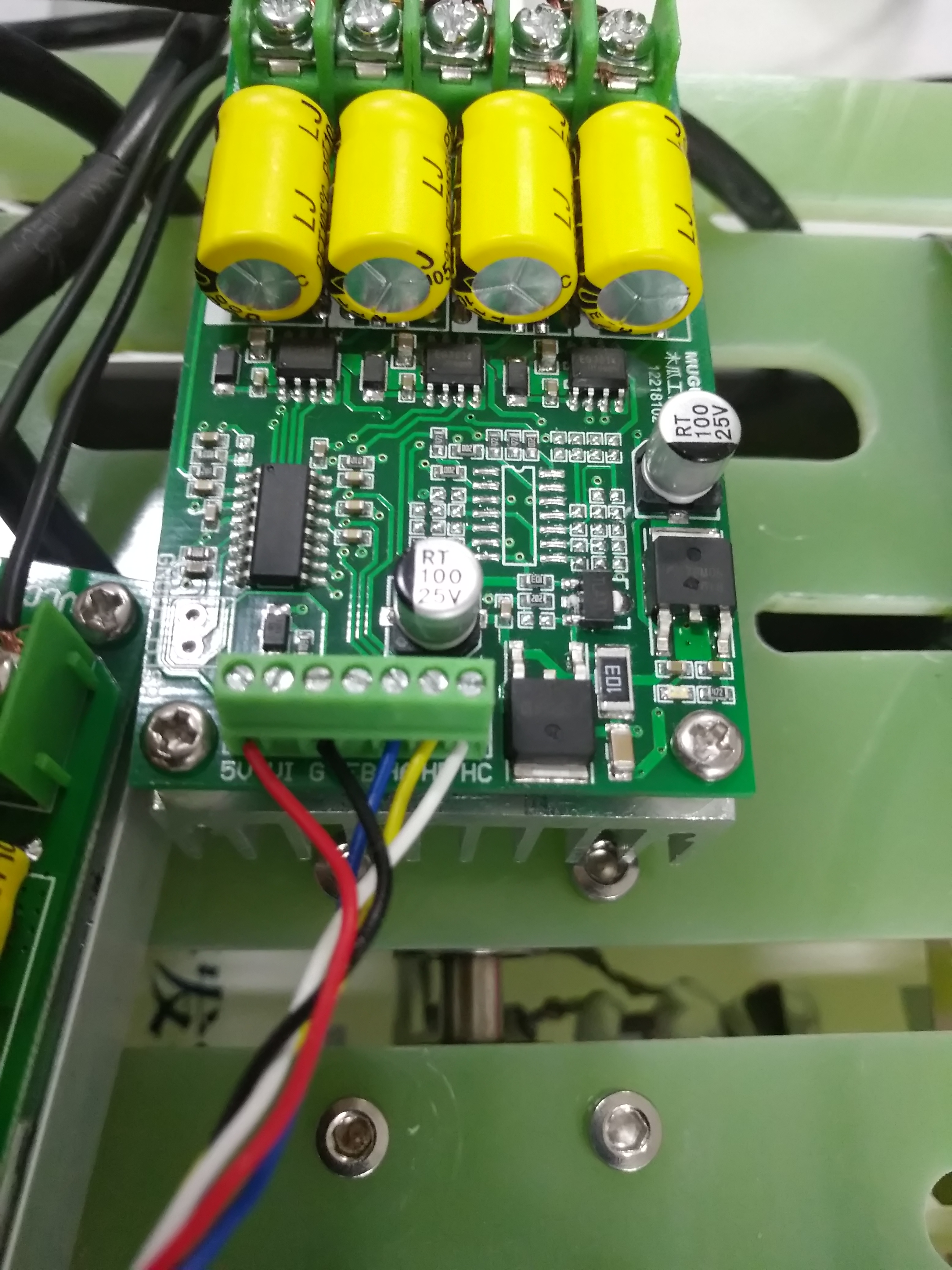
实物连接图

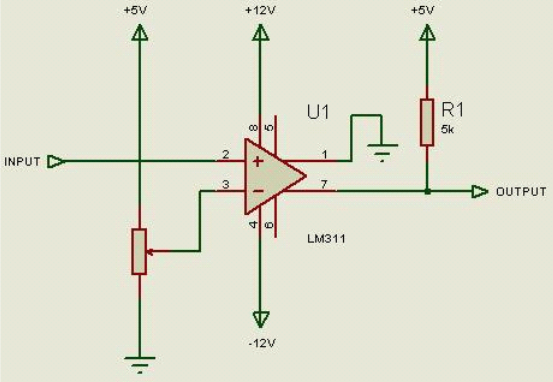
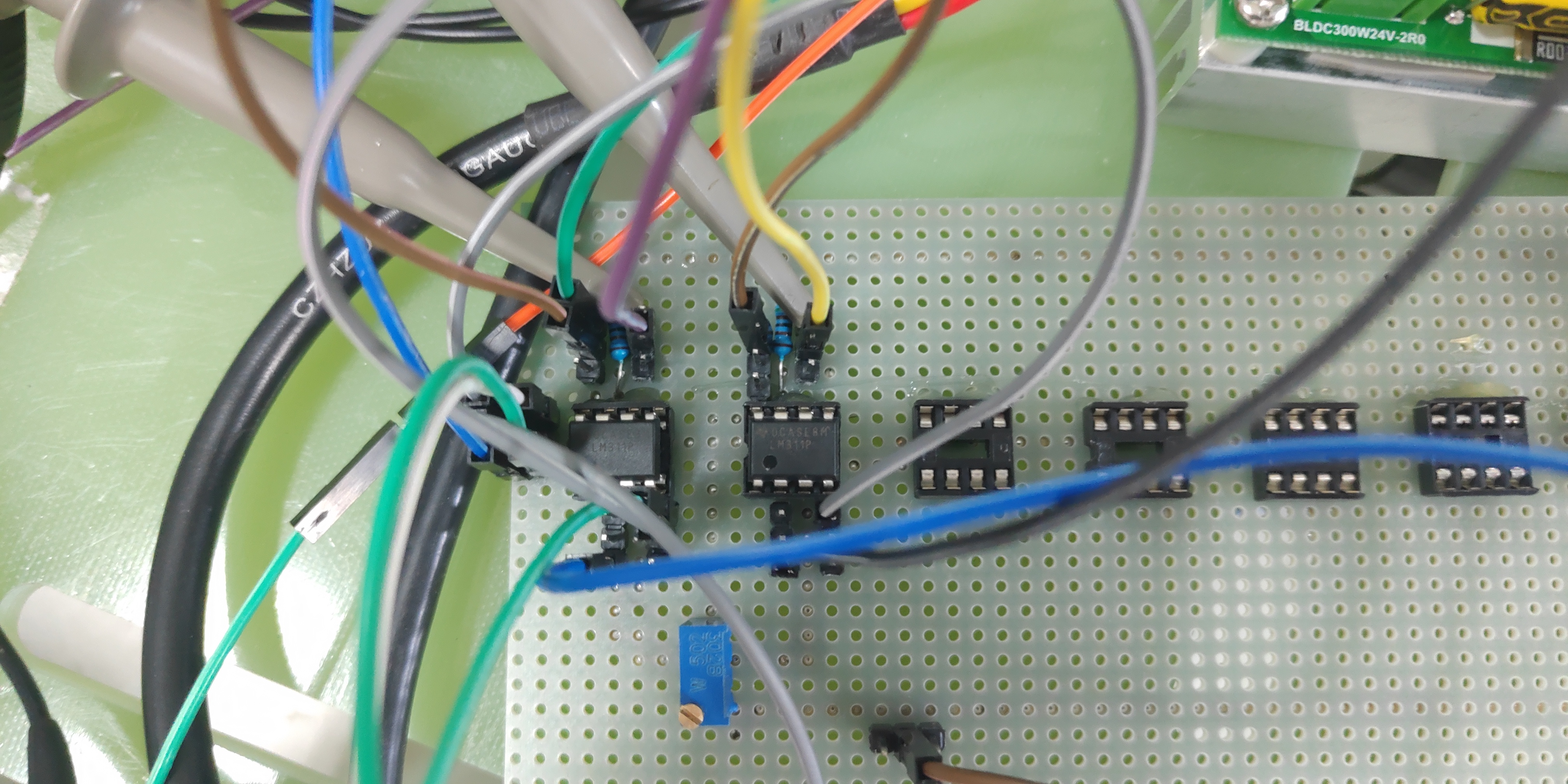
脉冲反馈整形电路
由于驱动器的霍尔反馈输出存在较多毛刺,不利于后面做处理,故使用整形电路。
实物图
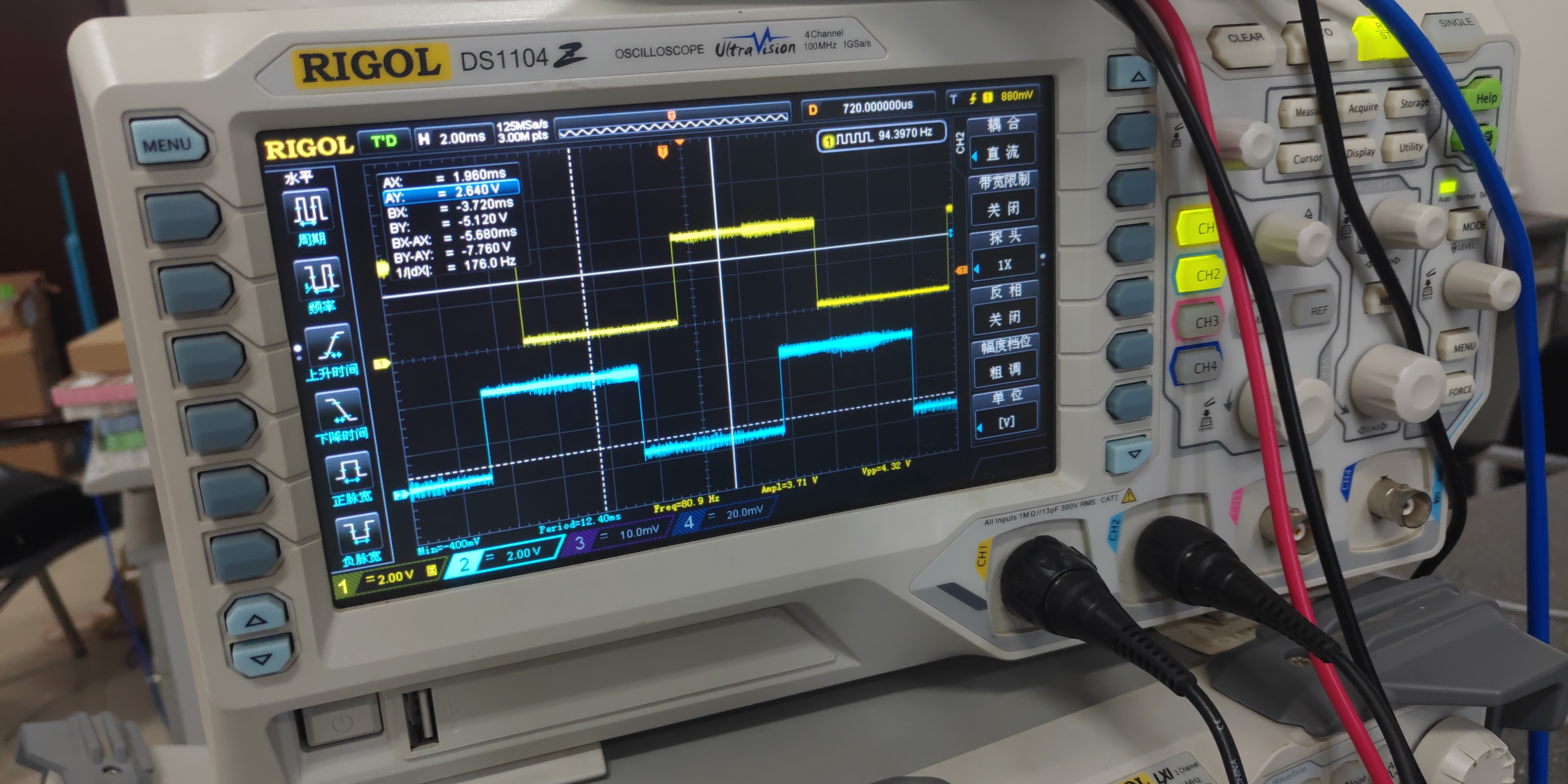
波形图
驱动器PWM输入
霍尔反馈整形后输出
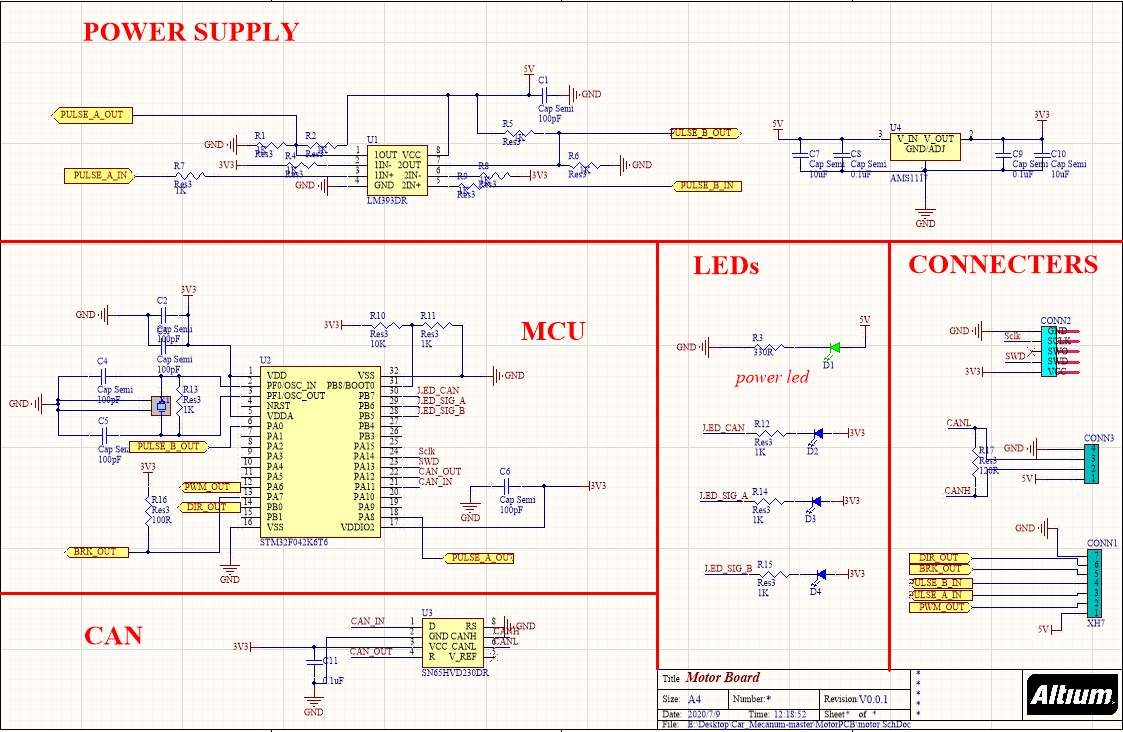
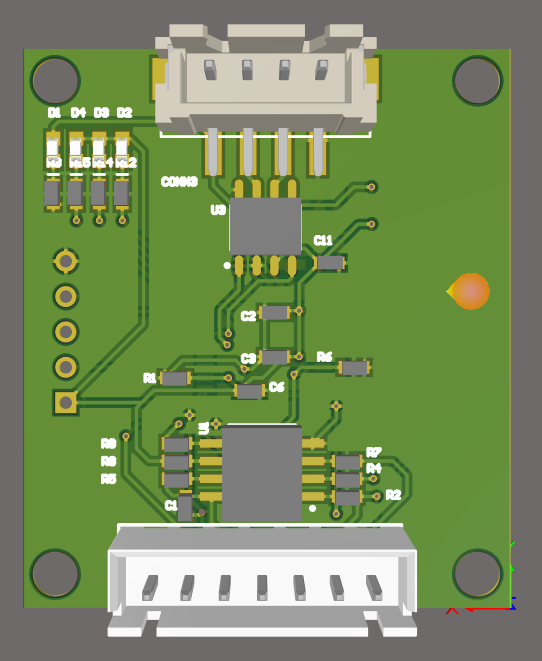
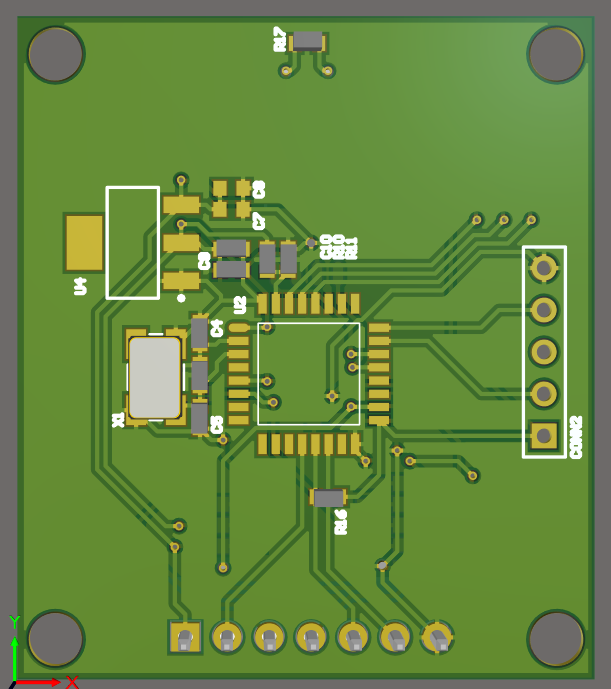
PCB电路
由于时间问题,这个板子没有做出来
原理图
3维图
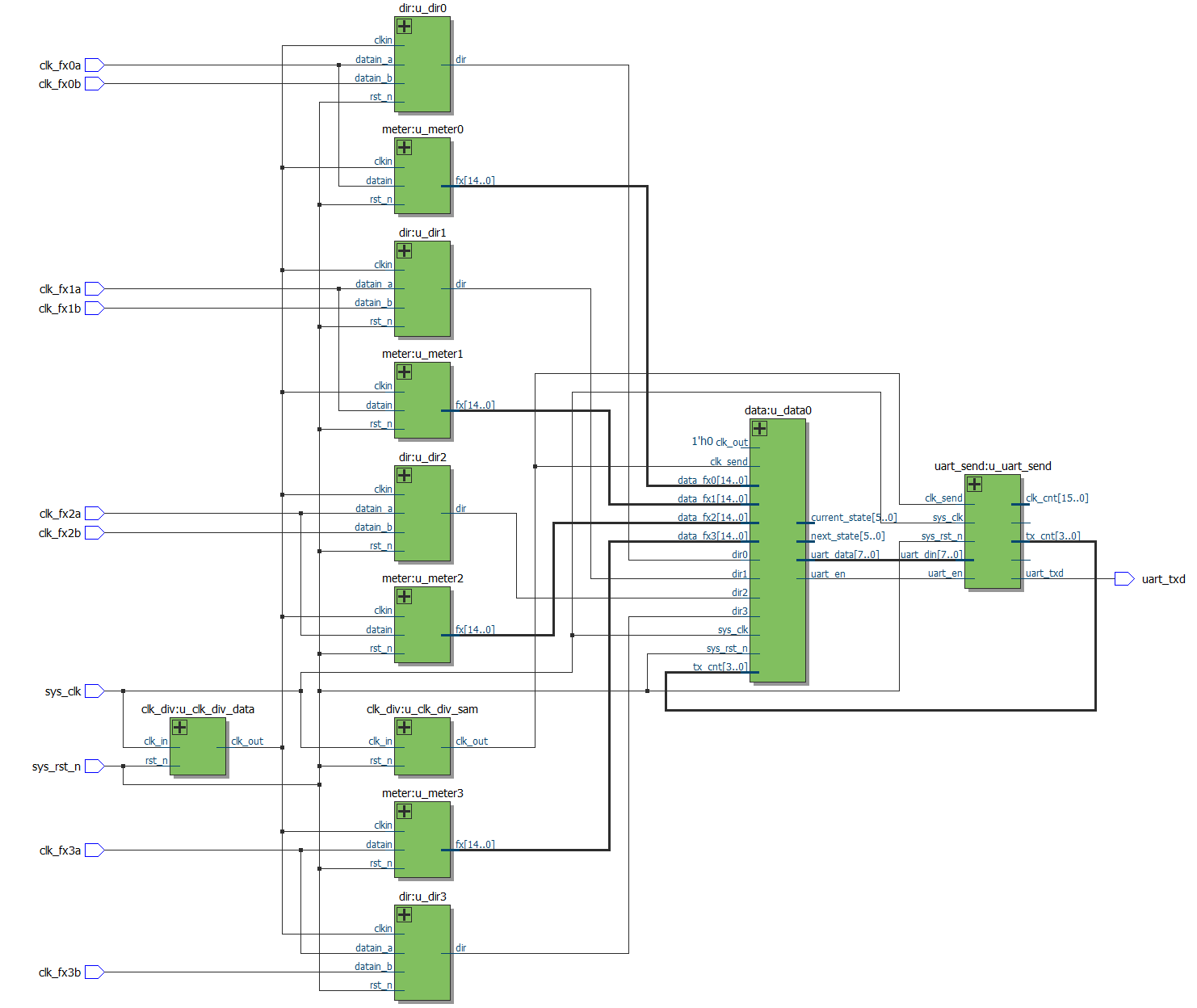
FPGA脉冲-转速转换
原理
根据测量发现,转速反馈最高频率为200hz,故可以采用定时计脉冲的方式得到速度。
FPGA分频得到基准时钟,然后记录中脉冲个数,得到速度。
FPGA框图
具体实现
上升沿计数
always @ (posedge clkin or negedge rst_n)
begin
if(!rst_n) datatmp = 2'b0;
else datatmp = {datain,datatmp[1]};
end
always @ (posedge clkin or negedge rst_n)
begin
if(!rst_n) cnt = 36'b0;
else if(datatmp == 2'b10) //上升沿
begin
cnt = cnttmp + 1'b1;
cnttmp = 36'b0;
end
else
cnttmp = cnttmp + 1'b1;
end
转速换算
always @ (posedge clkin or negedge rst_n)
begin
if(!rst_n) fx = 15'b0;
else if ( 36'd5000 < cnt && cnt < 36'd100000 && cnttmp < 36'd100000)
fx <= 36'd1_0000_0000 / cnt; //100 ~ 2000
else
fx <= 0;
end
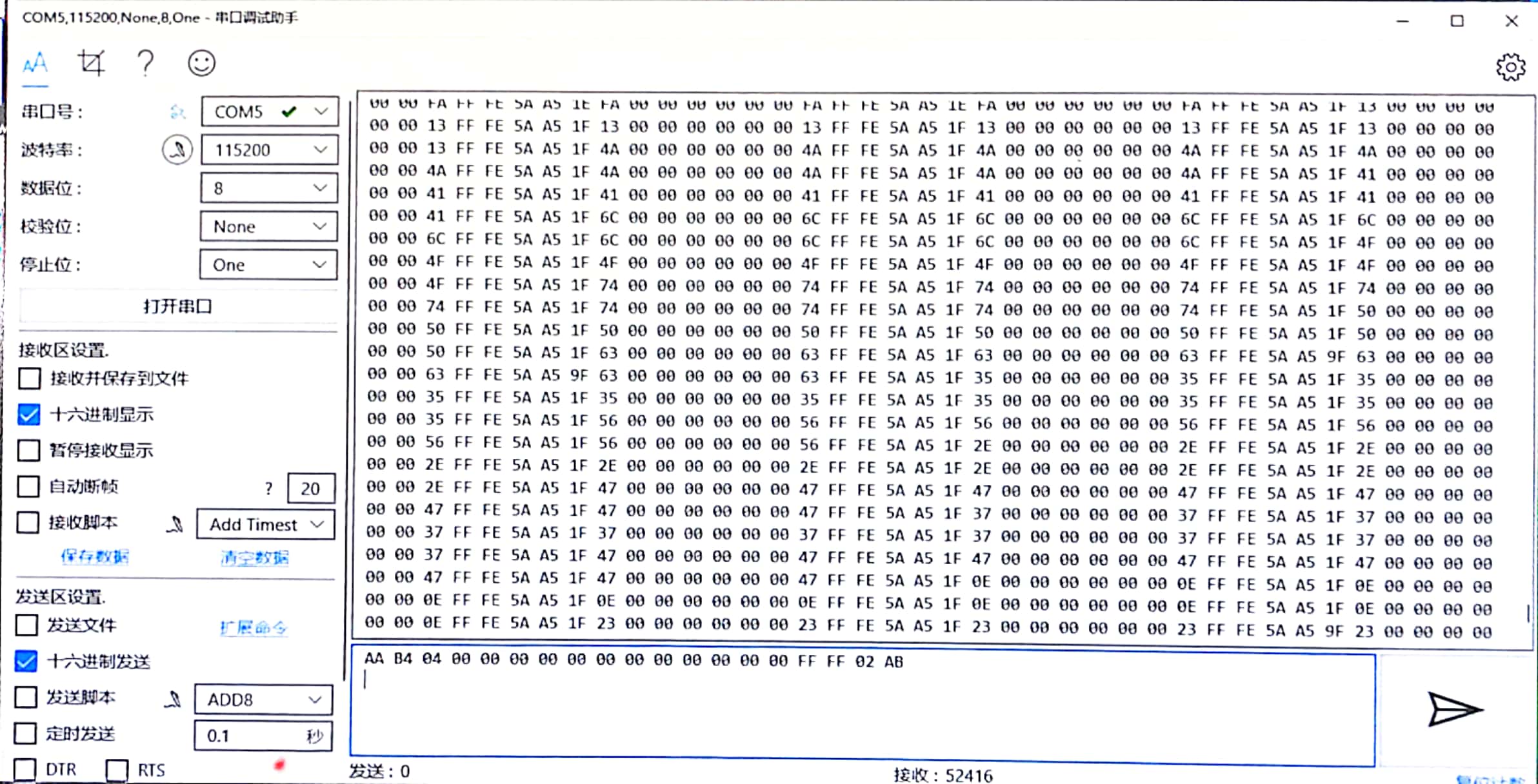
实物图
使用正点原子-新起点开发板 做测试,后面采用最简系统板。
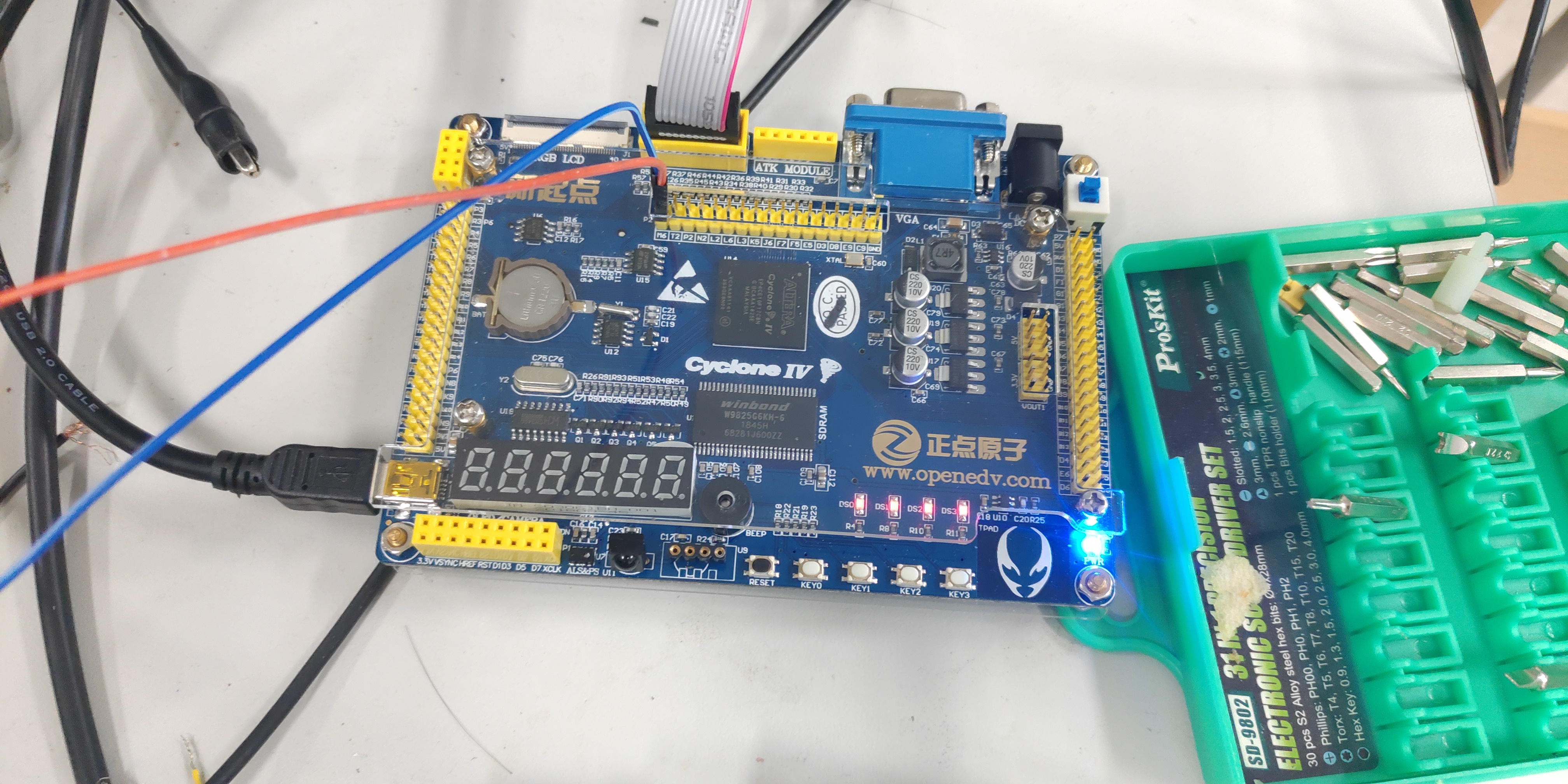
转速输出
STM32控制程序
主要部分
设置电机转速
void Set_Wheel_Speed(int16_t target,CAR_WHEEL *wheel,PID_GENERAL *pid,uint8_t Wheel_Num)
{
Wheel_PID(wheel->speed,target,pid);
switch(Wheel_Num)
{
case W_LF:
if(pid->output > 0)
{
DIR_CTL_LF(Bit_SET);
PWM_F_L(fabs(pid->output));
}
else {
DIR_CTL_LF(Bit_RESET);
PWM_F_L(fabs(pid->output));
}
break;
case W_RF:
if(pid->output > 0)
{
DIR_CTL_RF(Bit_SET);
PWM_F_R(fabs(pid->output));
}
else {
DIR_CTL_RF(Bit_RESET);
PWM_F_R(fabs(pid->output));
}
break;
case W_LB:
if(pid->output > 0)
{
DIR_CTL_LB(Bit_SET);
PWM_B_L(fabs(pid->output));
}
else {
DIR_CTL_LB(Bit_RESET);
PWM_B_L(fabs(pid->output));
}
break;
case W_RB:
if(pid->output > 0)
{
DIR_CTL_RB(Bit_SET);
PWM_B_R(fabs(pid->output));
}
else {
DIR_CTL_RB(Bit_RESET);
PWM_B_R(fabs(pid->output));
}
break;
default: break;
}
}
遥控器控制
void Motor_Control(void)
{
static int16_t channel_1 = 0,channel_2 = 0,channel_4 = 0;//channel_3 = 0
channel_1 = -rc_data.Channel_Current[2]/800.0f*10000*0.5f; //throttle
channel_2 = rc_data.Channel_Current[0]/800.0f*10000*0.5f; //rotate
//channel_3 = rc_data.Channel_Current[1]/800.0f*10000*0.5f; // no use
channel_4 = -rc_data.Channel_Current[3]/800.0f*10000*0.5f; //shift-left/right
Set_Wheel_Speed(channel_1-channel_4-channel_2,&Car_Wheel_LF,&PID_LF,W_LF);//-
Set_Wheel_Speed(-channel_1-channel_4-channel_2,&Car_Wheel_RF,&PID_RF,W_RF);
Set_Wheel_Speed(channel_1+channel_4-channel_2,&Car_Wheel_LB,&PID_LB,W_LB);//-
Set_Wheel_Speed(-channel_1+channel_4-channel_2,&Car_Wheel_RB,&PID_RB,W_RB);
}
最后
最后
以上就是义气冰淇淋最近收集整理的关于从零搭建麦轮小车从零搭建麦轮小车的全部内容,更多相关从零搭建麦轮小车从零搭建麦轮小车内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复