海尔630冰箱的标定和畸变校正。上篇文章中直接使用OpenCV的例程进行畸变校正的效果不太理想。使用以下方法(张正友)效果更好。
京东链接:
http://item.jd.com/4027713.html#crumb-wrap
标定代码:
/************************************************************************
运行环境:VS2013+OpenCV 2.4.13
运行结果:检测拍摄的棋盘畸变图像,获取摄像头的畸变信息
*************************************************************************/
#include <opencv2opencv.hpp>
#include <fstream>
#include <iostream>
using namespace std;
using namespace cv;
char dir[64];
char fileNames[64];
char chess_boardImage_path[] = "E:\hanxiaoxuan\distort\";
char chess_boardDetect_path[] = "E:\hanxiaoxuan\distort_detect\";
char chess_boardCorner_path[] = "E:\hanxiaoxuan\distort_corner\";
char calibrationResult[] = "E:\hanxiaoxuan\calibration_result.txt";
char datFileName[] = "E:\hanxiaoxuan\camParam.dat";
int main()
{
string *imageList = new string[100];
string *chess_boardList = new string[100];
ofstream fout(calibrationResult); //保存标定结果的文件
// 利用dir命令将当前目录下的.jpg文件名写入names.txt
sprintf(dir, "%s%s%s%s%s%s", "dir ", chess_boardImage_path, "*.jpg", " /a /b >", chess_boardImage_path, "names.txt");
system(dir);
char name[64] = "";
// 打开文件读取其中的文件名
sprintf(fileNames, "%s%s", chess_boardImage_path, "names.txt");
FILE* fp = fopen(fileNames, "r");
if (NULL == fp)
printf("error,cannot open the name list");
// 获得文件数量
int line = 0;
while (fgets(name, 64, fp) != NULL)
{
char subname[64];
sscanf(name, "%[^n]%s", subname);
string image_name;
stringstream stream;
stream << subname;
image_name = stream.str();
imageList[line] = image_name.substr(0, image_name.length() - 4);
line++;
}
//读取每一幅图像,从中提取出角点,然后对角点进行亚像素精确化
cout << "开始提取角点………………" << endl;
int image_count = line; //图像数量
Size board_size = Size(9, 6); //棋盘上每行、列的内角点数
vector<Point2f> corners; //缓存每幅图像上检测到的角点
vector<vector<Point2f>> corners_Seq; //保存检测到的所有角点
vector<Mat> image_Seq;
int successImageNum = 0; //成功提取角点的棋盘图数量
int count = 0;
for (int i = 0; i != image_count; i++)
{
cout << "Frame #" << i + 1 << "..." << endl;
string imageFileName;
imageFileName = imageList[i]; //图像的文件名
imageFileName += ".jpg"; //图像的文件名.jpg
cv::Mat image = imread(chess_boardImage_path + imageFileName);
//提取角点
cv::Mat imageGray;
cvtColor(image, imageGray, CV_RGB2GRAY);
bool patternfound = findChessboardCorners(image, board_size, corners, CALIB_CB_ADAPTIVE_THRESH + CALIB_CB_NORMALIZE_IMAGE +
CALIB_CB_FAST_CHECK);
if (!patternfound)
{
cout << "can not find chessboard corners!n";
continue;
exit(1);
}
else
{
//亚像素精确化
cornerSubPix(imageGray, corners, Size(11, 11), Size(-1, -1), TermCriteria(CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 30, 0.1));
//绘制检测到的角点并保存
Mat imageTemp = image.clone();
for (int j = 0; j < corners.size(); j++)
{
circle(imageTemp, corners[j], 10, Scalar(0, 0, 255), 2, 8, 0);
}
string imageFileName;
imageFileName = imageList[i];
imageFileName += "_corner.jpg";
imwrite(chess_boardCorner_path + imageFileName, imageTemp);
cout << "Frame corner#" << i + 1 << "...end" << endl;
imwrite(chess_boardDetect_path + imageFileName, image);
chess_boardList[successImageNum] = imageList[i];
count = count + corners.size();
successImageNum = successImageNum + 1;
corners_Seq.push_back(corners);
}
image_Seq.push_back(image);
}
cout << "角点提取完成!n";
//摄像机标定
cout << "开始标定………………" << endl;
Size square_size = Size(30, 30);
vector<vector<Point3f>> object_Points; //保存标定板上角点的三维坐标
Mat image_points = Mat(1, count, CV_32FC2, Scalar::all(0)); //保存提取的所有角点
vector<int> point_counts;
//初始化标定板上角点的三维坐标
for (int t = 0; t < successImageNum; t++)
{
vector<Point3f> tempPointSet;
for (int i = 0; i < board_size.height; i++)
{
for (int j = 0; j < board_size.width; j++)
{
//假设标定板放在世界坐标系中z=0的平面上
Point3f tempPoint;
tempPoint.x = i*square_size.width;
tempPoint.y = j*square_size.height;
tempPoint.z = 0;
tempPointSet.push_back(tempPoint);
}
}
object_Points.push_back(tempPointSet);
}
for (int i = 0; i < successImageNum; i++)
{
point_counts.push_back(board_size.width*board_size.height);
}
//开始标定
Size image_size = image_Seq[0].size();
cv::Matx33d intrinsic_matrix; //摄像机内参数矩阵
cv::Vec4d distortion_coeffs; //摄像机的4个畸变系数:k1,k2,k3,k4
std::vector<cv::Vec3d> rotation_vectors; //每幅图像的旋转向量
std::vector<cv::Vec3d> translation_vectors; //每幅图像的平移向量
int flags = 0;
flags |= cv::fisheye::CALIB_RECOMPUTE_EXTRINSIC;
flags |= cv::fisheye::CALIB_CHECK_COND;
flags |= cv::fisheye::CALIB_FIX_SKEW;
fisheye::calibrate(object_Points, corners_Seq, image_size, intrinsic_matrix, distortion_coeffs, rotation_vectors, translation_vectors, flags, cv::TermCriteria(3, 20, 1e-6));
cout << "标定完成!n";
FILE *camParam = fopen(datFileName, "wb");
if (camParam == NULL) {
std::cout << "can not create data file: " << datFileName << " !!!" << std::endl;
return false;
}
fwrite(&intrinsic_matrix, sizeof(cv::Matx33d), 1, camParam);
fwrite(&distortion_coeffs, sizeof(cv::Vec4d), 1, camParam);
fwrite(&image_size, sizeof(Size), 1, camParam);
fclose(camParam);
//对标定结果进行评价
cout << "开始评价标定结果………………" << endl;
double total_err = 0.0; //所有图像的平均误差的总和
double err = 0.0; //每幅图像的平均误差
vector<Point2f> image_points2; //保存重新计算得到的投影点
cout << "每幅图像的标定误差:" << endl;
cout << "每幅图像的标定误差:" << endl << endl;
for (int i = 0; i < successImageNum; i++)
{
vector<Point3f> tempPointSet = object_Points[i];
//通过得到的摄像机内外参数,对空间的三维点进行重新投影计算,得到新的投影点
fisheye::projectPoints(tempPointSet, image_points2, rotation_vectors[i], translation_vectors[i], intrinsic_matrix, distortion_coeffs);
//计算新的投影点和旧的投影点之间的误差
vector<Point2f> tempImagePoint = corners_Seq[i];
Mat tempImagePointMat = Mat(1, tempImagePoint.size(), CV_32FC2);
Mat image_points2Mat = Mat(1, image_points2.size(), CV_32FC2);
for (size_t i = 0; i != tempImagePoint.size(); i++)
{
image_points2Mat.at<Vec2f>(0, i) = Vec2f(image_points2[i].x, image_points2[i].y);
tempImagePointMat.at<Vec2f>(0, i) = Vec2f(tempImagePoint[i].x, tempImagePoint[i].y);
}
err = norm(image_points2Mat, tempImagePointMat, NORM_L2);
total_err += err /= point_counts[i];
cout << "第" << i + 1 << "幅图像的平均误差:" << err << "像素" << endl;
fout << "第" << i + 1 << "幅图像的平均误差:" << err << "像素" << endl;
}
cout << "总体平均误差:" << total_err / image_count << "像素" << endl;
fout << "总体平均误差:" << total_err / image_count << "像素" << endl << endl;
cout << "评价完成!" << endl;
//保存标定结果
cout << "开始保存标定结果………………" << endl;
Mat rotation_matrix = Mat(3, 3, CV_32FC1, Scalar::all(0)); //保存每幅图像的旋转矩阵
fout << "相机内参数矩阵:" << endl;
fout << intrinsic_matrix << endl;
fout << "畸变系数:n";
fout << distortion_coeffs << endl;
for (int i = 0; i < successImageNum; i++)
{
fout << "第" << i + 1 << "幅图像的旋转向量:" << endl;
fout << rotation_vectors[i] << endl;
//将旋转向量转换为相对应的旋转矩阵
Rodrigues(rotation_vectors[i], rotation_matrix);
fout << "第" << i + 1 << "幅图像的旋转矩阵:" << endl;
fout << rotation_matrix << endl;
fout << "第" << i + 1 << "幅图像的平移向量:" << endl;
fout << translation_vectors[i] << endl;
}
cout << "完成保存" << endl;
fout << endl;
//显示标定结果
Mat mapx = Mat(image_size, CV_32FC1);
Mat mapy = Mat(image_size, CV_32FC1);
Mat R = Mat::eye(3, 3, CV_32F);
cout << "保存矫正图像" << endl;
for (int i = 0; i != successImageNum; i++)
{
cout << "Frame #" << i + 1 << "..." << endl;
Mat newCameraMatrix = Mat(3, 3, CV_32FC1, Scalar::all(0));
fisheye::initUndistortRectifyMap(intrinsic_matrix, distortion_coeffs, R, intrinsic_matrix, image_size, CV_32FC1, mapx, mapy);
Mat t = image_Seq[i].clone();
cv::remap(image_Seq[i], t, mapx, mapy, INTER_LINEAR);
string imageFileName;
imageFileName = chess_boardList[i];
imageFileName += "_d.jpg";
imwrite(chess_boardCorner_path + imageFileName, t);
}
cout << "保存结束" << endl;
delete [] imageList;
delete [] chess_boardList;
return 0;
}得到两组参数,分别是相机的内参矩阵和畸变系数。保存在camPara.dat供calibration代码校正使用。
校正代码:
/************************************************************************
运行环境:VS2013+OpenCV 2.4.13
运行结果:根据摄像头的畸变信息,进行相机标定
*************************************************************************/
#include <opencv2opencv.hpp>
#include <fstream>
#include <iostream>
using namespace std;
using namespace cv;
char dir[64];
char test_fileNames[64];
char testFile_path[] = "E:\hanxiaoxuan\distort\";
char outputFile_path[] = "E:\hanxiaoxuan\undistort\";
char test_datFileName[] = "E:\hanxiaoxuan\camParam.dat";
//string test_imageList[100];
int main()
{
string *test_imageList = new string[100];
// 利用dir命令将当前目录下的.jpg文件名写入test_names.txt
sprintf(dir, "%s%s%s%s%s%s", "dir ", testFile_path, "*.jpg", " /a /b >", testFile_path, "test_names.txt");
system(dir);
char test_name[64] = "";
// 打开文件读取其中的文件名
sprintf(test_fileNames, "%s%s", testFile_path, "test_names.txt");
FILE* fp_test = fopen(test_fileNames, "r");
if (NULL == fp_test)
printf("error,cannot open the name list");
// 获得文件数量
int line = 0;
while (fgets(test_name, 64, fp_test) != NULL)
{
char subname[64];
sscanf(test_name, "%[^n]%s", subname);
string image_name;
stringstream stream;
stream << subname;
image_name = stream.str();
test_imageList[line] = image_name.substr(0, image_name.length() - 4);
line++;
}
string testName;
//利用摄像机畸变参数对图片进行矫正
cout << "保存矫正图像" << endl;
for (int i = 0; i < line; i++)
{
cout << "Frame #" << i + 1 << "..." << endl;
testName = test_imageList[i] + ".jpg";
Mat testImage = imread(testFile_path + testName);
cv::Matx33d test_intrinsic_matrix;
cv::Vec4d test_distortion_coeffs;
Size test_image_size = testImage.size();
FILE *test_camParam = fopen(test_datFileName, "rb");
if (test_camParam == NULL) {
std::cout << "can not create data file: " << test_datFileName << " !!!" << std::endl;
return false;
}
fread(&test_intrinsic_matrix, sizeof(cv::Matx33d), 1, test_camParam);
fread(&test_distortion_coeffs, sizeof(cv::Vec4d), 1, test_camParam);
fread(&test_image_size, sizeof(Size), 1, test_camParam);
fclose(test_camParam);
Mat test_mapx = Mat(test_image_size, CV_32FC1);
Mat test_mapy = Mat(test_image_size, CV_32FC1);
Mat test_R = Mat::eye(3, 3, CV_32F);
fisheye::initUndistortRectifyMap(test_intrinsic_matrix, test_distortion_coeffs, test_R, test_intrinsic_matrix, test_image_size, CV_32FC1, test_mapx, test_mapy);
Mat t = testImage.clone();
cv::remap(testImage, t, test_mapx, test_mapy, INTER_LINEAR);
imwrite(outputFile_path + testName, t);
}
cout << "标定结束" << endl;
delete [] test_imageList;
return 0;
}
校正效果如下:
原图1

原图校正后
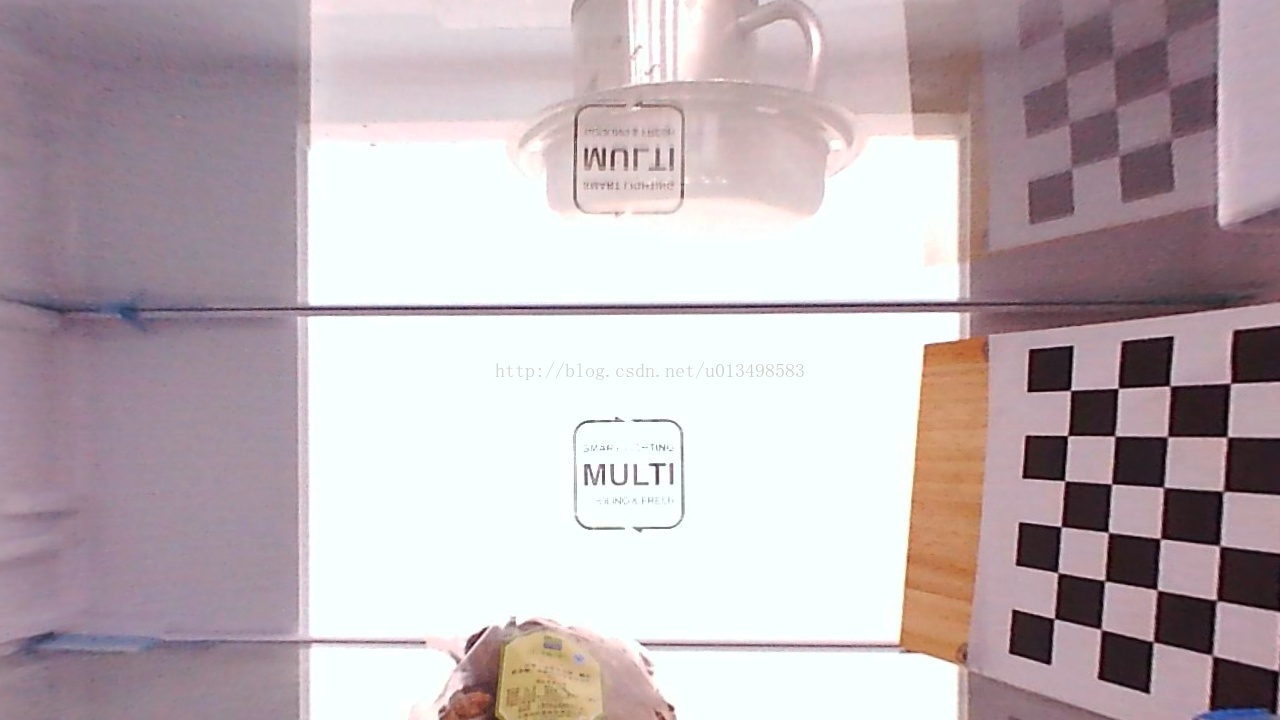
原图2
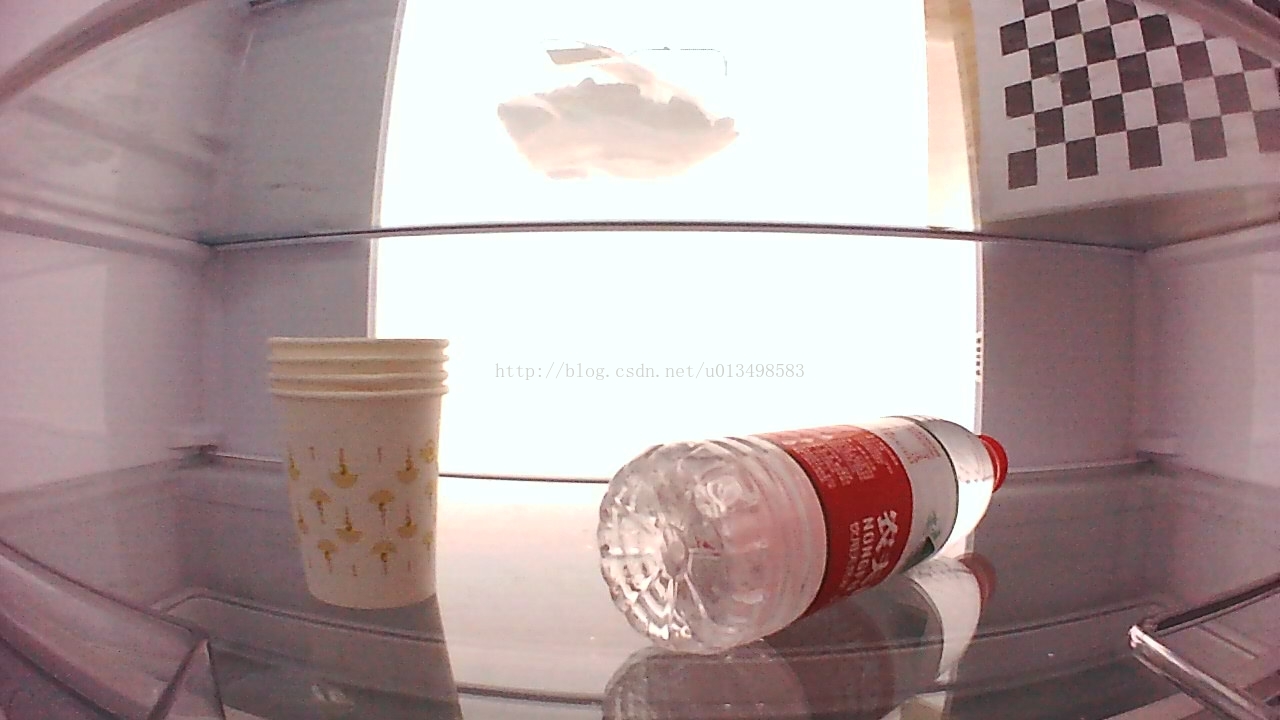
校正后
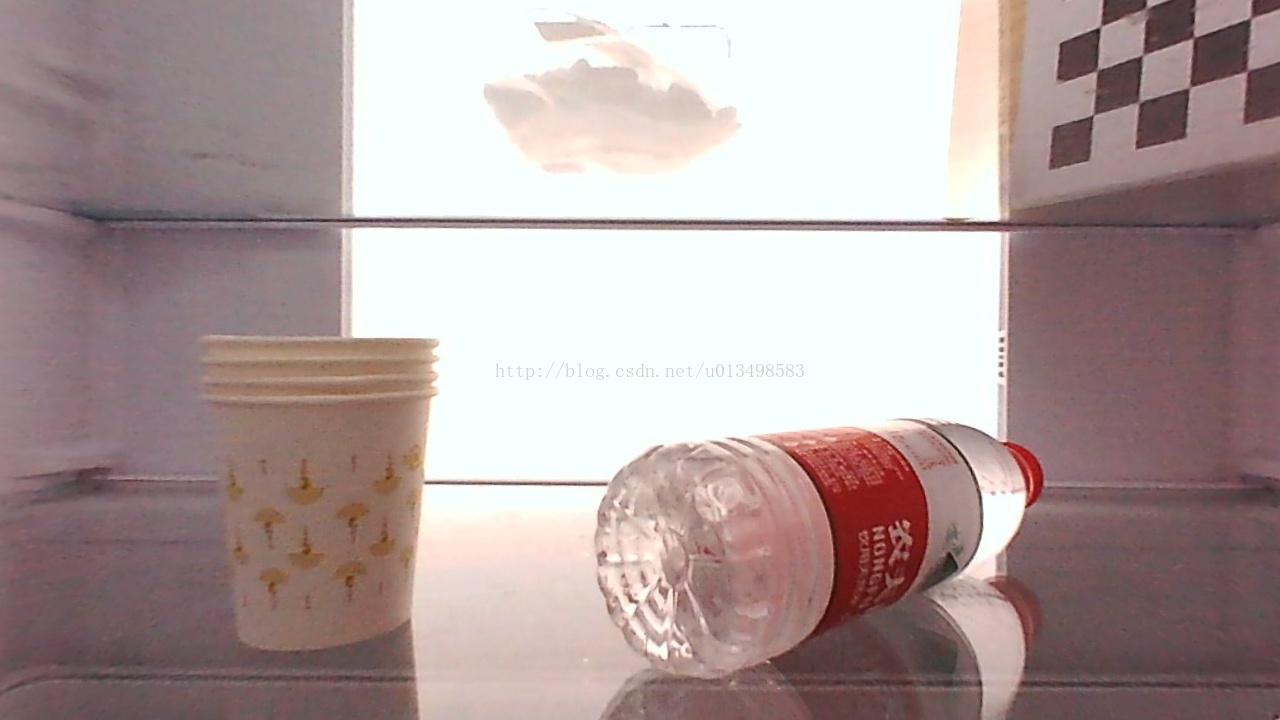
校正效果基本令人满意。
最后
以上就是自觉小懒虫最近收集整理的关于OpenCV 标定和畸变校正(2)的全部内容,更多相关OpenCV内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复