原理
串口的基本原理大家学单片机的时候应该都了解了,这里便不再赘述,直接从初始化结构体与常用库函数两个方面来讲解。
初始化结构体
打开库里的stm32f10x_usart.h文件。
里面有两个结构体,一个是 USART_InitTypeDef,另一个是 USART_ClockInitTypeDef.
第一个是我们要学习的异步串口,第二个是同步串口,直接pass.
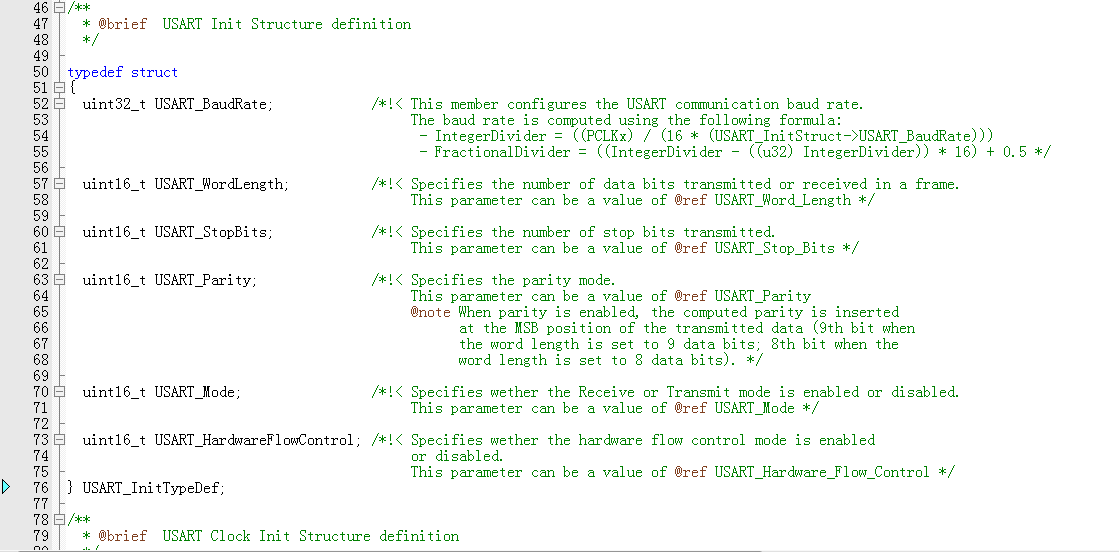
根据变量名称与右侧的英文解释,我们很容易就能知道结构体的含义——
//波特率
uint32_t USART_BaudRate; /*!< This member configures the USART communication baud rate.
The baud rate is computed using the following formula:
- IntegerDivider = ((PCLKx) / (16 * (USART_InitStruct->USART_BaudRate)))
- FractionalDivider = ((IntegerDivider - ((u32) IntegerDivider)) * 16) + 0.5 */
//字节长度,我们一般选8字节
uint16_t USART_WordLength; /*!< Specifies the number of data bits transmitted or received in a frame.
This parameter can be a value of @ref USART_Word_Length */
//停止位,一般选一位停止位
uint16_t USART_StopBits; /*!< Specifies the number of stop bits transmitted.
This parameter can be a value of @ref USART_Stop_Bits */
//校验位,一般我们不选
uint16_t USART_Parity; /*!< Specifies the parity mode.
This parameter can be a value of @ref USART_Parity
@note When parity is enabled, the computed parity is inserted
at the MSB position of the transmitted data (9th bit when
the word length is set to 9 data bits; 8th bit when the
word length is set to 8 data bits). */
//串口模式,一般接收和发送都打开
uint16_t USART_Mode; /*!< Specifies wether the Receive or Transmit mode is enabled or disabled.
This parameter can be a value of @ref USART_Mode */
//是否硬件流控制,当然不啊
uint16_t USART_HardwareFlowControl; /*!< Specifies wether the hardware flow control mode is enabled
or disabled.
This parameter can be a value of @ref USART_Hardware_Flow_Control */
找参数的话,一样也是选中 @ref 后面的内容,然后 Ctrl+F,查找参数位置;
例如——
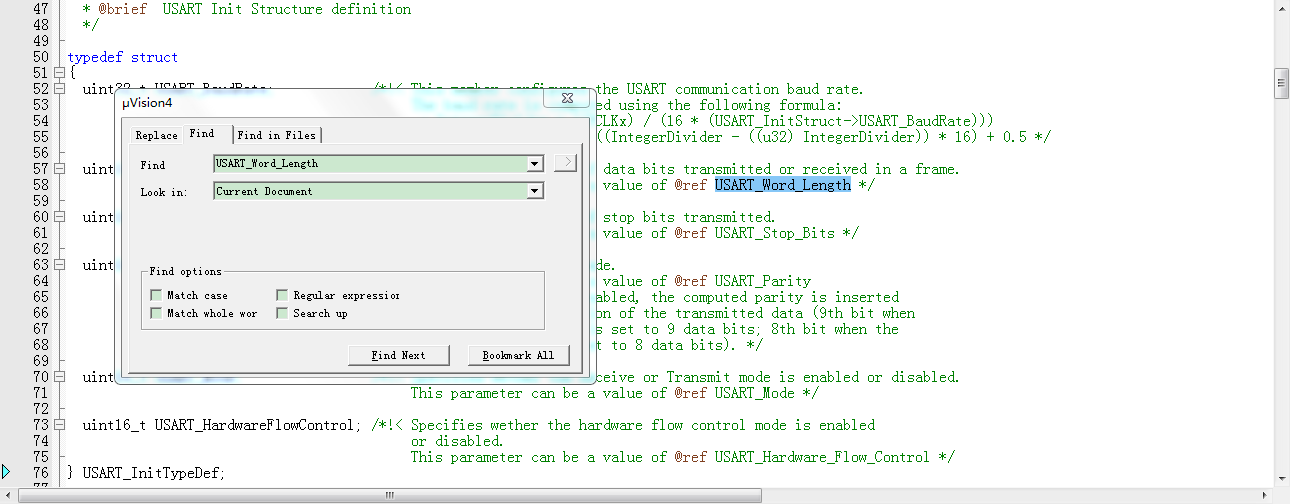
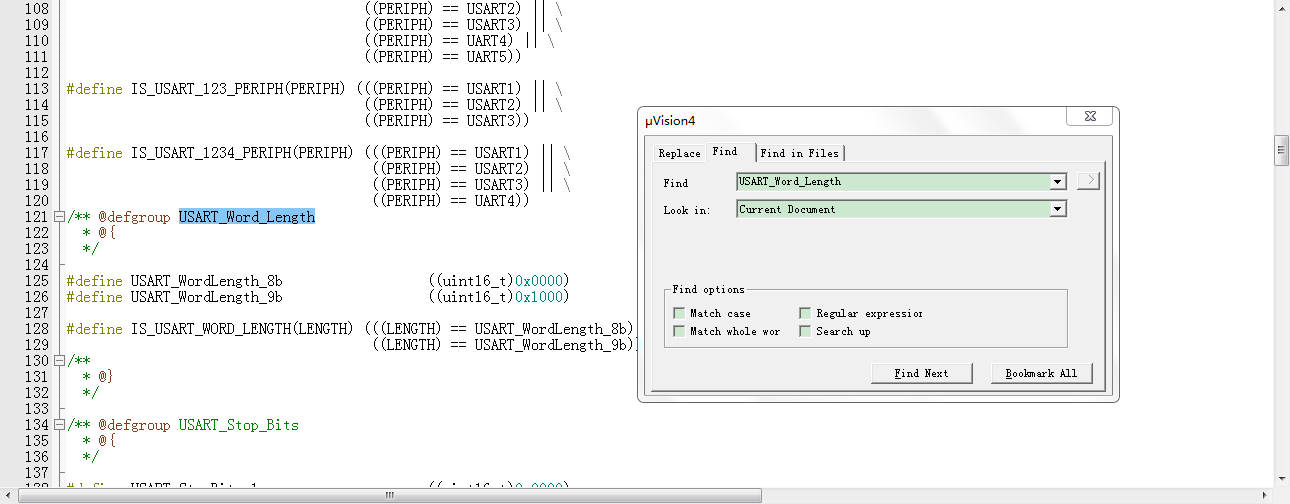
然后选择参数就行了。
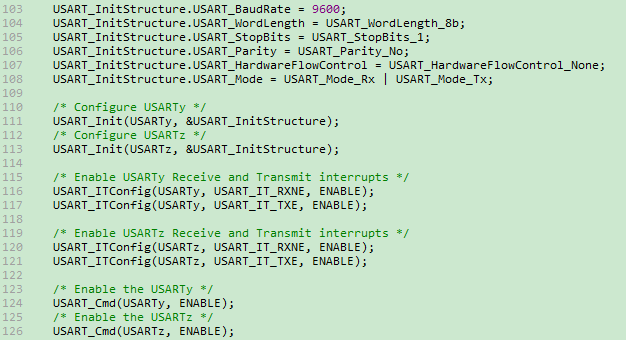
一般我们配置成下面这样——
USART_InitStructure.USART_BaudRate = 9600;//也可以写一个形参
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//八位数据位
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一位停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无校验位
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//使能发送接收
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//不使能硬件流控制
然后写入到 USART_Init 函数中就行了。
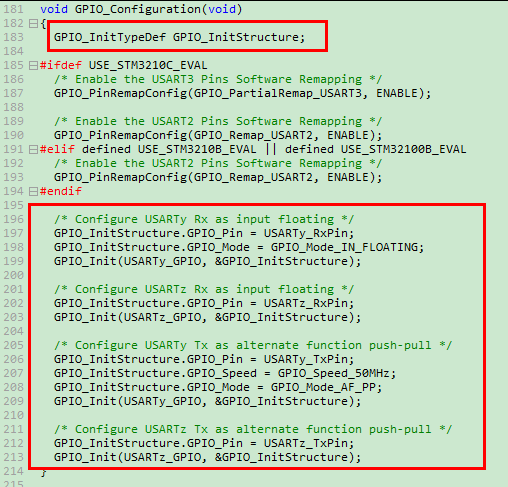
管脚就配置就不用多说了,但要注意发送管脚与接收管脚的模式是不一样的,前者是复用推挽输出,后者是浮空输入。看使用环境就行了。
管脚查询的话,找赛点资源数据包_嵌入式5-竞赛板芯片资料里的 stm32f103rbt6.pdf,数据手册里是没有的。
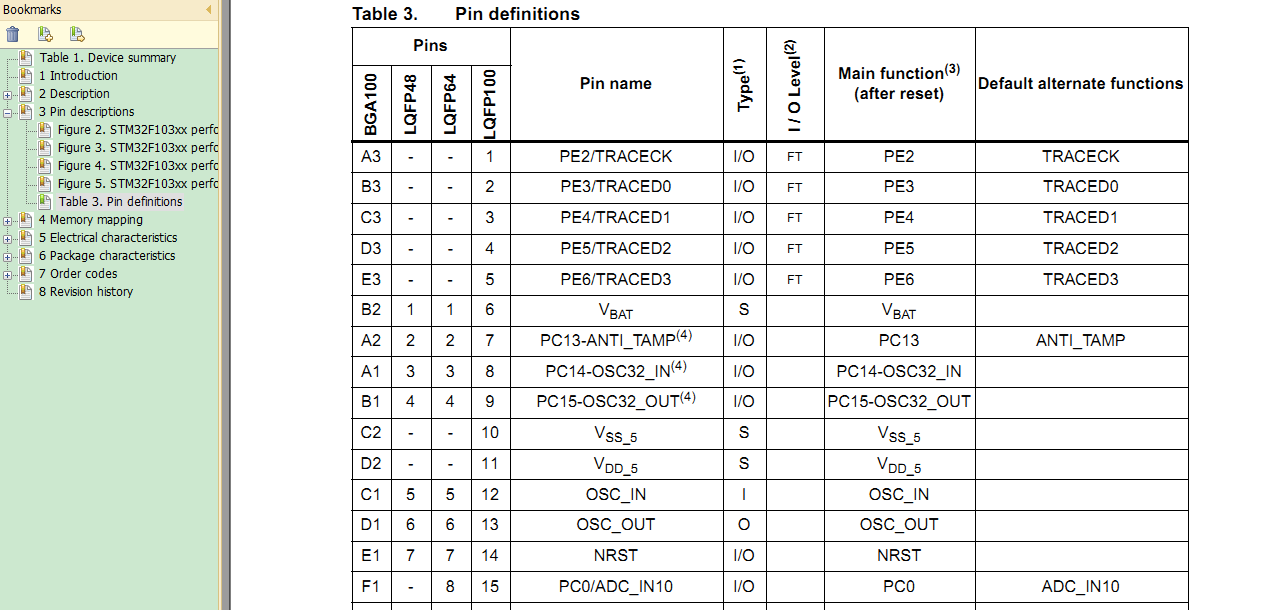
找到管脚定义(Pin definition),然后 Ctrl+F 搜索就行了。
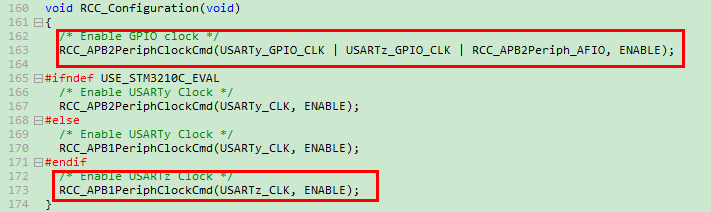
(对了,注意使能时钟时,注意串口2的时钟是在APB1上。)
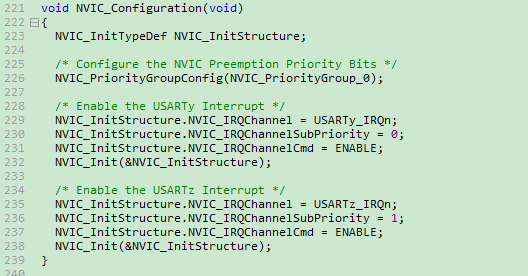
中断配置和前面也是一样的(虽然不知道我前面写没写)。
常用函数
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
初始化函数;
void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState);
串口使能函数;
void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState);
串口中断使能函数;
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
发送(一个)字节函数;
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);
接收(一个)字节函数;
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
获取串口标志位函数;清零的会硬件清零;
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint16_t USART_IT);
获取串口中断标志位,但是实验证明用上面的函数也能实现;
void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint16_t USART_IT);
清零串口中断标志位函数,中断毕竟不会硬件清零。
代码快速配置
打开库文件:
赛点资源数据包_嵌入式6-STM32固件库代码V3.5版stm32f10x_stdperiph_libSTM32F10x_StdPeriph_Lib_V3.5.0ProjectSTM32F10x_StdPeriph_ExamplesUSARTInterrupt
(注:Interrupt 中断)
初始化
打开main.c文件——

 改写结果如下——
改写结果如下——
void Usart2_Init(void){
USART_InitTypeDef USART_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
//使能时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
//串口2初始化
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//八位数据位
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一位停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//不使能硬件流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//使能发送接收
USART_Init(USART2, &USART_InitStructure);
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//使能接收中断
USART_Cmd(USART2, ENABLE);//使能串口2
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);//PA3为接收引脚,配置为浮空输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);//PA2为发送引脚,设置为复用推挽输出
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
/* Enable the USARTy Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;//开启串口2中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;//优先级最高
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能中断
NVIC_Init(&NVIC_InitStructure);
}
使用函数
打开stm32f10x_it.c文件——
保留为——
void USART2_IRQHandler(void)
{
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET)
{
RxBuffer1[RxCounter1++] = USART_ReceiveData(USART2);
if(RxCounter1 == NbrOfDataToRead1)
{
/* Disable the USARTy Receive interrupt */
USART_ITConfig(USARTy, USART_IT_RXNE, DISABLE);
}
}
}
修改为 ——
unsigned char RXBUF[20];
unsigned char RXOVER = 0;
unsigned char RXCUNT = 0;
void USART2_IRQHandler(void)
{
unsigned char temp;
if(USART_GetFlagStatus(USART2, USART_IT_RXNE) == SET){//检查指定的 USART 中断发生与否
USART_ClearITPendingBit(USART2,USART_IT_RXNE);//清除中断标志位
temp = USART_ReceiveData(USART2);//接收数据
if(temp == 'e'){//发送e之前的数据
RXCUNT = 0;
RXOVER = 1;
USART_ITConfig(USART2, USART_IT_RXNE, DISABLE);//关闭中断
}
else{
RXBUF[RXCUNT] = temp;
RXCUNT ++;
}
}
}
发送函数:(就自己记一下吧)
unsigned char Usart2_SendChar(uint8_t ucChar){
while(!USART_GetFlagStatus(USART2,USART_FLAG_TXE));
USART_SendData(USART2,ucChar);
return ucChar;
}
void Usart2_SendString(uint8_t * pucStr){
while(*pucStr != '�')
Usart2_SendChar(USART2,*pucStr ++);
while(!USART_GetFlagStatus(USART2,USART_FLAG_TC));//注意这一步,不然可能导致数据丢失
}
void Usart2_disp(void){
int i;
if(RXOVER){
LCD_ClearLine(Line4);
LCD_DisplayStringLine(Line4,RXBUF);
Usart2_SendString(USART2,RXBUF);
for(i = 0;i < 20;i ++){
RXBUF[i] = 0;
}//其实也可以用memset函数,注意加 string.h 头文件
//memset( RXBUF, 0 , ( 20 * sizeof(uint8_t) ) );//清零RXBUF数组
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);
RXOVER = 0;
}
}
最后
以上就是留胡子西牛最近收集整理的关于蓝桥杯嵌入式_STM32学习_USART配置原理代码快速配置的全部内容,更多相关蓝桥杯嵌入式_STM32学习_USART配置原理代码快速配置内容请搜索靠谱客的其他文章。








发表评论 取消回复