ROS学习心得——机器人篇——同一局域网下机器人与主机的通信
FOR THE SIGMA
FOR THE GTINDER
FOR THE ROBOMASTER
简介:
关于这一章我将详细的介绍如何利用一台搭载这mini PC(Ubuntu16.04)的机器人与一台装有虚拟机(Ubuntu16.04)主机进行基于ROS的通信,通过SSH从主机发送指令给机器人(mini PC)完成相应操作。
本教程结合多个博客进行学习。
希望大家能一次配得成功。
操作系统版本:Ubuntu16.04(注意:不同的ROS版本对应相应的Ubuntu操作系统版本的切勿安装错误)
http://www.ubuntu.org.cn/download/desktop 桌面版ubuntu16.04 下载
http://mirror.pnl.gov/releases/xenial/ Ubuntu系列镜像文件下载列表(amd64为64位,i386为32位)
注:如何安装Ubuntu16.04教程 https://blog.csdn.net/whl970831/article/details/88097353
ROS版本:kinetic-火箭龟
http://www.ros.org/ ROS官网
http://wiki.ros.org/kinetic/Installation ROS-kinetic下载地址(wiki里面的教程很不错的)
注:如何安装ROS-kinetic教程 https://blog.csdn.net/whl970831/article/details/88097108
虚拟机版本:VMware15(注意:如果可以的话尽量不要用虚拟机,容易出现崩坏现象,为啥作者要用呢?当然是没钱啊!>_<
https://my.vmware.com/cn/web/vmware/info/slug/desktop_end_user_computing/vmware_workstation_pro/15_0
15版下载,密匙百度
设备:mini PC-NUC-纯linux系统-Ubuntu16.04-admin1234@TOT123
主机-笔记本电脑-虚拟机-Ubuntu16.04-whl970831@ubuntu
国内源推荐:阿里云、sohu、cn99
更新:
2019.12.2 更新一下minipc与电脑端的称呼(帮助小白理解主机与从机与本文中的机器人与主机的定义)
安装步骤
注意:虚拟机需要用桥接方式
1.时间同步
在mini PC(机器人)与笔记本电脑(主机)上配置如下
sudo apt-get install chrony
2.获取主机名
在mini PC(机器人)与笔记本电脑(主机)上配置如下
注意: 在这里的minipc是控制的机器人或是工控机(你可以理解为常见资料里的主机)而笔记本电脑指的是你通过它去控制(ssh)机器人(工控机)的终端(你可以理解为常见资料里的从机)
hostname
注意:有的时候因为hostname太长了则需要修改一下,首先输入su root进入root模式,其次再输入sudo gedit /etc/hostname进入里面修改并保存,然后再输入sudo gedit /etc/hosts更改相应信息,最后直接重启即可。
3.获取双方IP地址
在mini PC(机器人)与笔记本电脑(主机)上配置如下
ifconfig
得到了192.168.1.105于笔记本上
得到了192.168.1.103于mini PC上
4.修改双方的host文件信息
首先在双方终端输入
sudo gedit /etc/hosts
然后再笔记本上配置如下信息
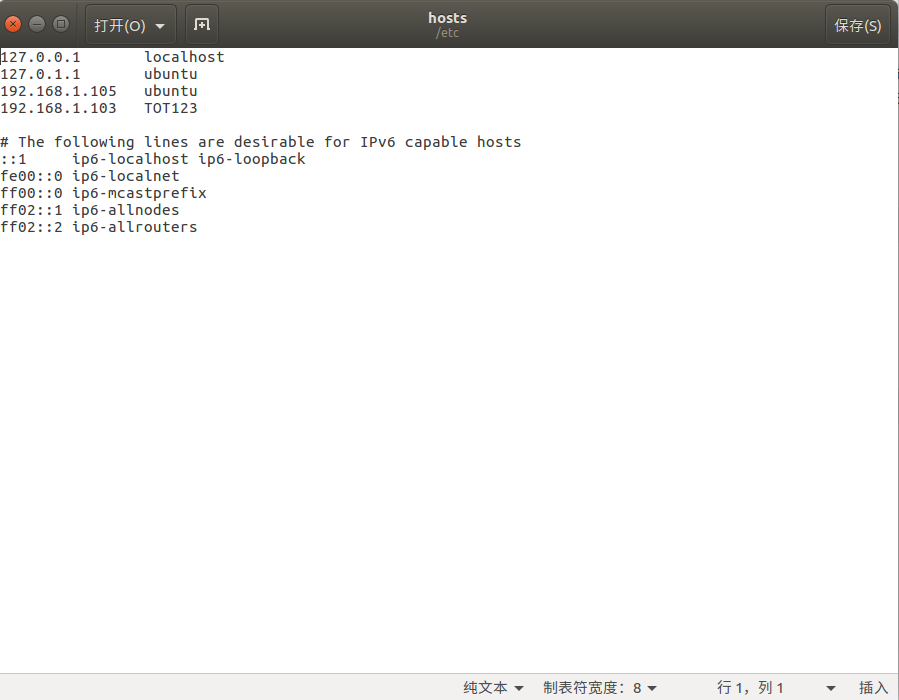
同理,再mini PC上也配上这东西。
5.修改./bashrc信息
在mini PC(机器人)与笔记本电脑(主机)上配置如下
sudo gedit ~/.bashrc
在笔记本电脑(主机)这边的~/.bashrc文件最后添加
export ROS_HOSTNAME=192.168.1.105
export ROS_MASTER_URI=http://192.168.1.103:11311
完成后保存并关闭,再终端输入
source ~/.bashrc
结束
在mini PC(机器人)这边的~/.bashrc文件最后添加
export ROS_HOSTNAME=192.168.1.103
export ROS_MASTER_URI=http://192.168.1.103:11311
完成后保存并关闭,再终端输入
source ~/.bashrc
结束
6.进行相互ping
在笔记本电脑(主机)上ping
ping 192.168.1.103
或是
ping TOT123
得到结果图
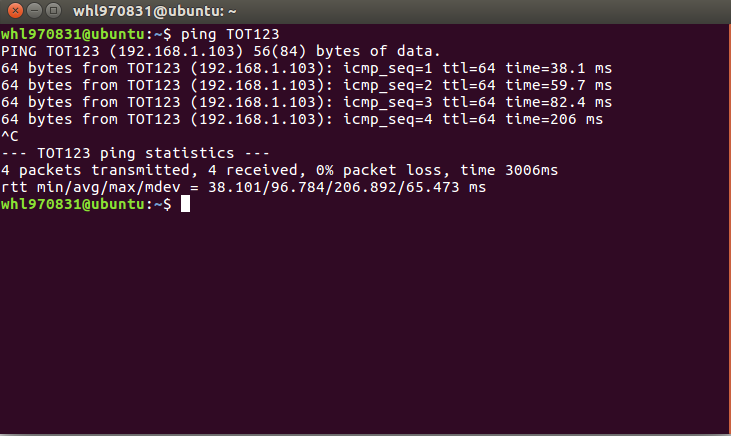
这样就是成功的
7.安装必要的软件
首先得安装openssh-server,打开新终端输入
sudo apt-get install openssh-server
若安装失败可尝试sudo apt-get update更新一下
然后再安装ssh,输入
sudo apt-get install ssh
安装成功后进入下一步
8.修改sshd_config文件
打开新终端输入
sudo gedit /etc/ssh/sshd_config
修改成如下
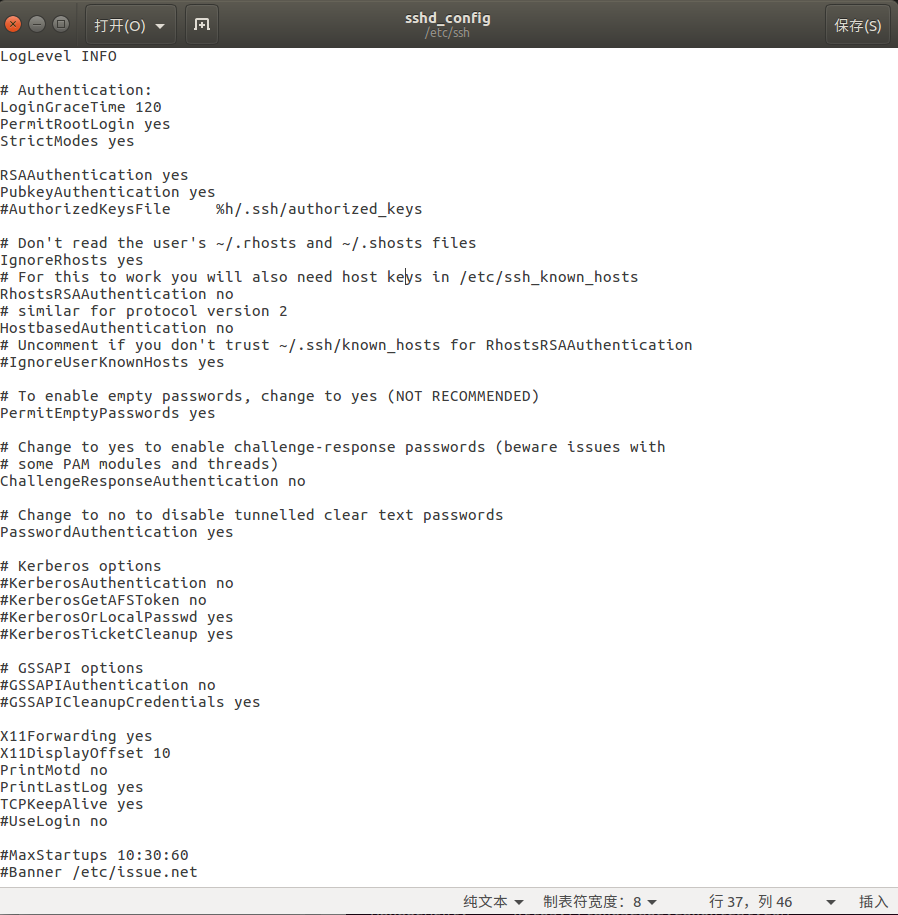
需保证
PermitRootLogin yes
PubkeyAuthentication yes
PasswordAuthentication yes
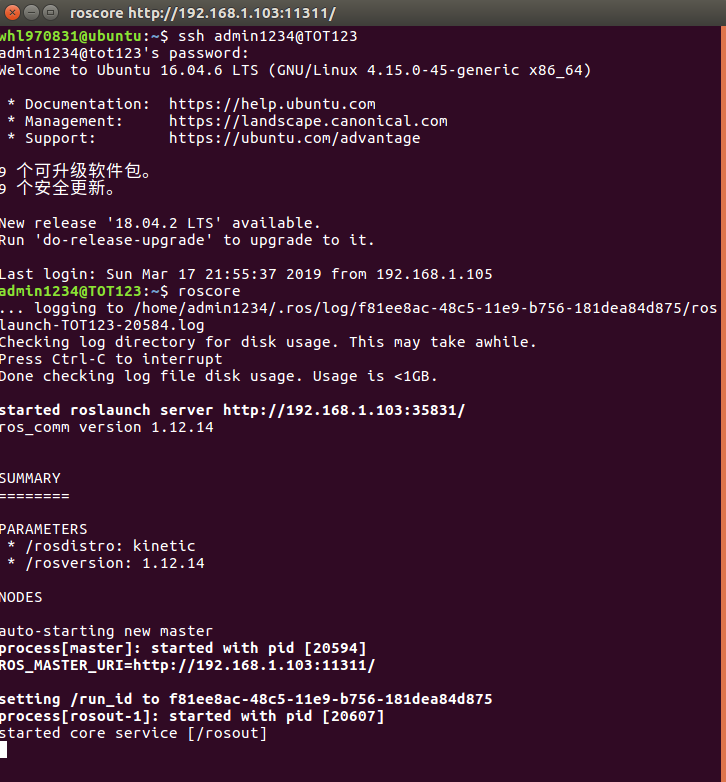
9.连接mini PC
打开终端输入
ssh admin1234@TOT123
输入密码(这里指的是mini PC上的密码)
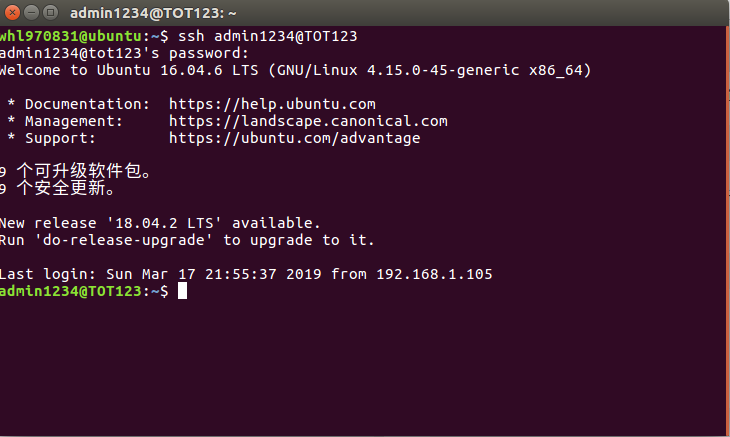
成功进入后输入roscore看看
最后
以上就是等待乐曲最近收集整理的关于ROS学习心得——机器人篇——同一局域网下机器人与主机的通信的全部内容,更多相关ROS学习心得——机器人篇——同一局域网下机器人与主机内容请搜索靠谱客的其他文章。








发表评论 取消回复