嵌入式Linux实验
嵌入式Linux作业二
文章目录
- 嵌入式Linux实验
- 作业要求
- 一、作业分析
- 二、实验步骤
- 1.下载并解压uboot1.1.6源码
- 2. 分析该版本下开发板smdk2410的相关启动代码
- (1)、smdk2410开发板配置和编译:
- (2)、smdk2410开发板启动相关核心文件:
- stage1
- stage2
- 三、总结
作业要求
uboot启动代码分析总结
1、下载uboot1.1.6源码
2、分析该版本下开发版smdk2410的相关启动代码
3、在分析过程中注意指出核心代码的所在文件目录,并附相关核心代码
4、要求个人独立完成并独立提交
提示:以下是本篇文章正文内容,下面案例可供参考
一、作业分析
- 下载uboot1.1.6源码
- 分析该版本下开发板smdk2410的相关启动代码且指出核心代码所在文件目录,并附上核心代码
二、实验步骤
1.下载并解压uboot1.1.6源码
下载地址:https://ftp.denx.de/pub/u-boot/,选择1.1.6的版本下载
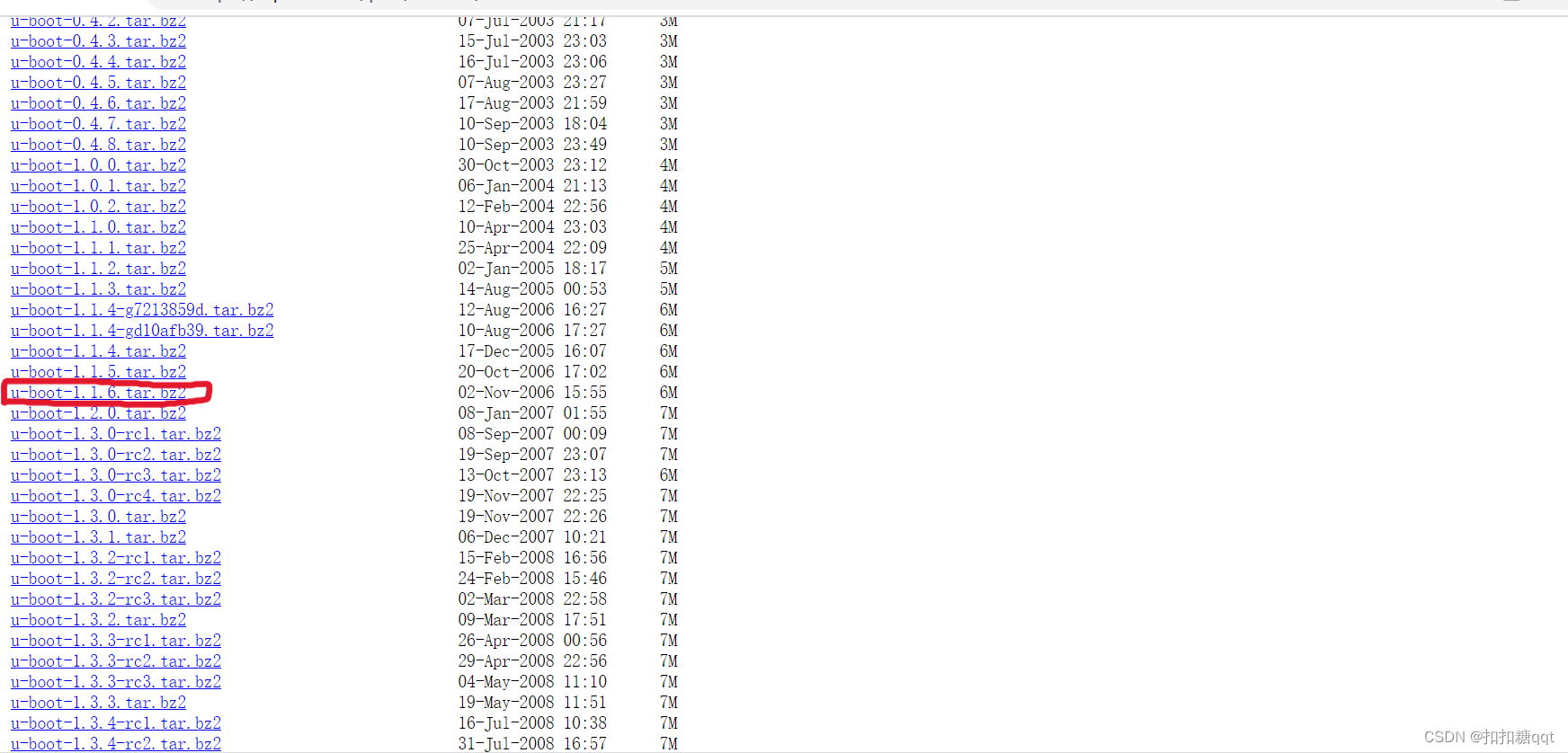
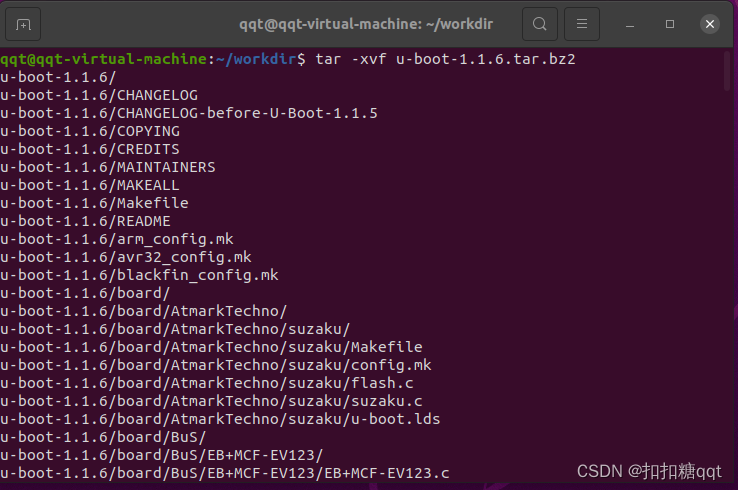
下载并解压:
2. 分析该版本下开发板smdk2410的相关启动代码
(1)、smdk2410开发板配置和编译:
u-boot主目录底下makefile文件对整个工程的编译链接规则进行了描述(如可执行脚本、生成的配置文件在哪个目录底下),执行make smdk2410 config时,会调用makefile以下代码:
smdk2410_config : unconfig
@$(MKCONFIG) $(@:_config=) arm arm920t smdk2410 NULL s3c24x0
主目录下的config.mk定义了一些通用变量,如ARCH、CPU、BOARD、SOC等,包括生成主板链接文件,config.mk代码如下所示:
# (C) Copyright 2000-2006
# Wolfgang Denk, DENX Software Engineering, wd@denx.de.
#
# See file CREDITS for list of people who contributed to this
# project.
#
# This program is free software; you can redistribute it and/or
# modify it under the terms of the GNU General Public License as
# published by the Free Software Foundation; either version 2 of
# the License, or (at your option) any later version.
#
# This program is distributed in the hope that it will be useful,
# but WITHOUT ANY WARRANTY; without even the implied warranty of
# MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
# GNU General Public License for more details.
#
# You should have received a copy of the GNU General Public License
# along with this program; if not, write to the Free Software
# Foundation, Inc., 59 Temple Place, Suite 330, Boston,
# MA 02111-1307 USA
#
#########################################################################
ifneq ($(OBJTREE),$(SRCTREE))
ifeq ($(CURDIR),$(SRCTREE))
dir :=
else
dir := $(subst $(SRCTREE)/,,$(CURDIR))
endif
obj := $(if $(dir),$(OBJTREE)/$(dir)/,$(OBJTREE)/)
src := $(if $(dir),$(SRCTREE)/$(dir)/,$(SRCTREE)/)
$(shell mkdir -p $(obj))
else
obj :=
src :=
endif
# clean the slate ...
PLATFORM_RELFLAGS =
PLATFORM_CPPFLAGS =
PLATFORM_LDFLAGS =
#
# When cross-compiling on NetBSD, we have to define __PPC__ or else we
# will pick up a va_list declaration that is incompatible with the
# actual argument lists emitted by the compiler.
#
# [Tested on NetBSD/i386 1.5 + cross-powerpc-netbsd-1.3]
ifeq ($(ARCH),ppc)
ifeq ($(CROSS_COMPILE),powerpc-netbsd-)
PLATFORM_CPPFLAGS+= -D__PPC__
endif
ifeq ($(CROSS_COMPILE),powerpc-openbsd-)
PLATFORM_CPPFLAGS+= -D__PPC__
endif
endif
ifeq ($(ARCH),arm)
ifeq ($(CROSS_COMPILE),powerpc-netbsd-)
PLATFORM_CPPFLAGS+= -D__ARM__
endif
ifeq ($(CROSS_COMPILE),powerpc-openbsd-)
PLATFORM_CPPFLAGS+= -D__ARM__
endif
endif
ifeq ($(ARCH),blackfin)
PLATFORM_CPPFLAGS+= -D__BLACKFIN__ -mno-underscore
endif
ifdef ARCH
sinclude $(TOPDIR)/$(ARCH)_config.mk # include architecture dependend rules
endif
ifdef CPU
sinclude $(TOPDIR)/cpu/$(CPU)/config.mk # include CPU specific rules
endif
ifdef SOC
sinclude $(TOPDIR)/cpu/$(CPU)/$(SOC)/config.mk # include SoC specific rules
endif
ifdef VENDOR
BOARDDIR = $(VENDOR)/$(BOARD)
else
BOARDDIR = $(BOARD)
endif
ifdef BOARD
sinclude $(TOPDIR)/board/$(BOARDDIR)/config.mk # include board specific rules
endif
#########################################################################
CONFIG_SHELL := $(shell if [ -x "$$BASH" ]; then echo $$BASH;
else if [ -x /bin/bash ]; then echo /bin/bash;
else echo sh; fi ; fi)
ifeq ($(HOSTOS)-$(HOSTARCH),darwin-ppc)
HOSTCC = cc
else
HOSTCC = gcc
endif
HOSTCFLAGS = -Wall -Wstrict-prototypes -O2 -fomit-frame-pointer
HOSTSTRIP = strip
#########################################################################
#
# Option checker (courtesy linux kernel) to ensure
# only supported compiler options are used
#
cc-option = $(shell if $(CC) $(CFLAGS) $(1) -S -o /dev/null -xc /dev/null
> /dev/null 2>&1; then echo "$(1)"; else echo "$(2)"; fi ;)
#
# Include the make variables (CC, etc...)
#
AS = $(CROSS_COMPILE)as
LD = $(CROSS_COMPILE)ld
CC = $(CROSS_COMPILE)gcc
CPP = $(CC) -E
AR = $(CROSS_COMPILE)ar
NM = $(CROSS_COMPILE)nm
STRIP = $(CROSS_COMPILE)strip
OBJCOPY = $(CROSS_COMPILE)objcopy
OBJDUMP = $(CROSS_COMPILE)objdump
RANLIB = $(CROSS_COMPILE)RANLIB
ifneq (,$(findstring s,$(MAKEFLAGS)))
ARFLAGS = cr
else
ARFLAGS = crv
endif
RELFLAGS= $(PLATFORM_RELFLAGS)
DBGFLAGS= -g # -DDEBUG
OPTFLAGS= -Os #-fomit-frame-pointer
ifndef LDSCRIPT
#LDSCRIPT := $(TOPDIR)/board/$(BOARDDIR)/u-boot.lds.debug
ifeq ($(CONFIG_NAND_U_BOOT),y)
LDSCRIPT := $(TOPDIR)/board/$(BOARDDIR)/u-boot-nand.lds
else
LDSCRIPT := $(TOPDIR)/board/$(BOARDDIR)/u-boot.lds
endif
endif
OBJCFLAGS += --gap-fill=0xff
gccincdir := $(shell $(CC) -print-file-name=include)
CPPFLAGS := $(DBGFLAGS) $(OPTFLAGS) $(RELFLAGS)
-D__KERNEL__ -DTEXT_BASE=$(TEXT_BASE)
ifneq ($(OBJTREE),$(SRCTREE))
CPPFLAGS += -I$(OBJTREE)/include2 -I$(OBJTREE)/include
endif
CPPFLAGS += -I$(TOPDIR)/include
CPPFLAGS += -fno-builtin -ffreestanding -nostdinc
-isystem $(gccincdir) -pipe $(PLATFORM_CPPFLAGS)
ifdef BUILD_TAG
CFLAGS := $(CPPFLAGS) -Wall -Wstrict-prototypes
-DBUILD_TAG='"$(BUILD_TAG)"'
else
CFLAGS := $(CPPFLAGS) -Wall -Wstrict-prototypes
endif
# avoid trigraph warnings while parsing pci.h (produced by NIOS gcc-2.9)
# this option have to be placed behind -Wall -- that's why it is here
ifeq ($(ARCH),nios)
ifeq ($(findstring 2.9,$(shell $(CC) --version)),2.9)
CFLAGS := $(CPPFLAGS) -Wall -Wno-trigraphs
endif
endif
# $(CPPFLAGS) sets -g, which causes gcc to pass a suitable -g<format>
# option to the assembler.
AFLAGS_DEBUG :=
# turn jbsr into jsr for m68k
ifeq ($(ARCH),m68k)
ifeq ($(findstring 3.4,$(shell $(CC) --version)),3.4)
AFLAGS_DEBUG := -Wa,-gstabs,-S
endif
endif
AFLAGS := $(AFLAGS_DEBUG) -D__ASSEMBLY__ $(CPPFLAGS)
LDFLAGS += -Bstatic -T $(LDSCRIPT) -Ttext $(TEXT_BASE) $(PLATFORM_LDFLAGS)
# Location of a usable BFD library, where we define "usable" as
# "built for ${HOST}, supports ${TARGET}". Sensible values are
# - When cross-compiling: the root of the cross-environment
# - Linux/ppc (native): /usr
# - NetBSD/ppc (native): you lose ... (must extract these from the
# binutils build directory, plus the native and U-Boot include
# files don't like each other)
#
# So far, this is used only by tools/gdb/Makefile.
ifeq ($(HOSTOS)-$(HOSTARCH),darwin-ppc)
BFD_ROOT_DIR = /usr/local/tools
else
ifeq ($(HOSTARCH),$(ARCH))
# native
BFD_ROOT_DIR = /usr
else
#BFD_ROOT_DIR = /LinuxPPC/CDK # Linux/i386
#BFD_ROOT_DIR = /usr/pkg/cross # NetBSD/i386
BFD_ROOT_DIR = /opt/powerpc
endif
endif
ifeq ($(PCI_CLOCK),PCI_66M)
CFLAGS := $(CFLAGS) -DPCI_66M
endif
#########################################################################
export CONFIG_SHELL HPATH HOSTCC HOSTCFLAGS CROSS_COMPILE
AS LD CC CPP AR NM STRIP OBJCOPY OBJDUMP
MAKE
export TEXT_BASE PLATFORM_CPPFLAGS PLATFORM_RELFLAGS CPPFLAGS CFLAGS AFLAGS
#########################################################################
ifndef REMOTE_BUILD
%.s: %.S
$(CPP) $(AFLAGS) -o $@ $<
%.o: %.S
$(CC) $(AFLAGS) -c -o $@ $<
%.o: %.c
$(CC) $(CFLAGS) -c -o $@ $<
else
$(obj)%.s: %.S
$(CPP) $(AFLAGS) -o $@ $<
$(obj)%.o: %.S
$(CC) $(AFLAGS) -c -o $@ $<
$(obj)%.o: %.c
$(CC) $(CFLAGS) -c -o $@ $<
endif
#########################################################################
可以看到u-boot-1.1.6/board/smdk2410下有u-boot.lds链接文件,链接描述文件代码如下所示:
/*
* (C) Copyright 2002
* Gary Jennejohn, DENX Software Engineering, <gj@denx.de>
*
* See file CREDITS for list of people who contributed to this
* project.
*
* This program is free software; you can redistribute it and/or
* modify it under the terms of the GNU General Public License as
* published by the Free Software Foundation; either version 2 of
* the License, or (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program; if not, write to the Free Software
* Foundation, Inc., 59 Temple Place, Suite 330, Boston,
* MA 02111-1307 USA
*/
OUTPUT_FORMAT("elf32-littlearm", "elf32-littlearm", "elf32-littlearm")
/*OUTPUT_FORMAT("elf32-arm", "elf32-arm", "elf32-arm")*/
OUTPUT_ARCH(arm)
ENTRY(_start)
SECTIONS
{
. = 0x00000000;
. = ALIGN(4);
.text :
{
cpu/arm920t/start.o (.text)
*(.text)
}
. = ALIGN(4);
.rodata : { *(.rodata) }
. = ALIGN(4);
.data : { *(.data) }
. = ALIGN(4);
.got : { *(.got) }
. = .;
__u_boot_cmd_start = .;
.u_boot_cmd : { *(.u_boot_cmd) }
__u_boot_cmd_end = .;
. = ALIGN(4);
__bss_start = .;
.bss : { *(.bss) }
_end = .;
}
同时该文件目录下有config.mk定义RAM链接地址从哪开始:
#
# (C) Copyright 2002
# Gary Jennejohn, DENX Software Engineering, <gj@denx.de>
# David Mueller, ELSOFT AG, <d.mueller@elsoft.ch>
#
# SAMSUNG SMDK2410 board with S3C2410X (ARM920T) cpu
#
# see http://www.samsung.com/ for more information on SAMSUNG
#
#
# SMDK2410 has 1 bank of 64 MB DRAM
#
# 3000'0000 to 3400'0000
#
# Linux-Kernel is expected to be at 3000'8000, entry 3000'8000
# optionally with a ramdisk at 3080'0000
#
# we load ourself to 33F8'0000
#
# download area is 3300'0000
#
TEXT_BASE = 0x33F80000
开发板配置头文件:u-boot/include/configs/smdk2410.h:
定义了两类变量:
* 一类是选项,前缀是CONFIG_,用来选择处理器、设备接口、命令、属性等。如:#define CONFIG_ARM902T 1 #define CONFIG_DRIVER_CS8900 1
* 另一类是参数,前缀是CFG_,用来定义总线频率、串口波特率、FLASH地址等参数,例如:#define CFG_FLASH_BASE 0x00000000
代码如下所示:
/*
* (C) Copyright 2002
* Sysgo Real-Time Solutions, GmbH <www.elinos.com>
* Marius Groeger <mgroeger@sysgo.de>
* Gary Jennejohn <gj@denx.de>
* David Mueller <d.mueller@elsoft.ch>
*
* Configuation settings for the SAMSUNG SMDK2410 board.
*
* See file CREDITS for list of people who contributed to this
* project.
*
* This program is free software; you can redistribute it and/or
* modify it under the terms of the GNU General Public License as
* published by the Free Software Foundation; either version 2 of
* the License, or (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program; if not, write to the Free Software
* Foundation, Inc., 59 Temple Place, Suite 330, Boston,
* MA 02111-1307 USA
*/
#ifndef __CONFIG_H
#define __CONFIG_H
/*
* High Level Configuration Options
* (easy to change)
*/
#define CONFIG_ARM920T 1 /* This is an ARM920T Core */
#define CONFIG_S3C2410 1 /* in a SAMSUNG S3C2410 SoC */
#define CONFIG_SMDK2410 1 /* on a SAMSUNG SMDK2410 Board */
/* input clock of PLL */
#define CONFIG_SYS_CLK_FREQ 12000000/* the SMDK2410 has 12MHz input clock */
#define USE_920T_MMU 1
#undef CONFIG_USE_IRQ /* we don't need IRQ/FIQ stuff */
/*
* Size of malloc() pool
*/
#define CFG_MALLOC_LEN (CFG_ENV_SIZE + 128*1024)
#define CFG_GBL_DATA_SIZE 128 /* size in bytes reserved for initial data */
/*
* Hardware drivers
*/
#define CONFIG_DRIVER_CS8900 1 /* we have a CS8900 on-board */
#define CS8900_BASE 0x19000300
#define CS8900_BUS16 1 /* the Linux driver does accesses as shorts */
/*
* select serial console configuration
*/
#define CONFIG_SERIAL1 1 /* we use SERIAL 1 on SMDK2410 */
/************************************************************
* RTC
************************************************************/
#define CONFIG_RTC_S3C24X0 1
/* allow to overwrite serial and ethaddr */
#define CONFIG_ENV_OVERWRITE
#define CONFIG_BAUDRATE 115200
/***********************************************************
* Command definition
***********************************************************/
#define CONFIG_COMMANDS
(CONFIG_CMD_DFL |
CFG_CMD_CACHE |
/*CFG_CMD_NAND |*/
/*CFG_CMD_EEPROM |*/
/*CFG_CMD_I2C |*/
/*CFG_CMD_USB |*/
CFG_CMD_REGINFO |
CFG_CMD_DATE |
CFG_CMD_ELF)
/* this must be included AFTER the definition of CONFIG_COMMANDS (if any) */
#include <cmd_confdefs.h>
#define CONFIG_BOOTDELAY 3
/*#define CONFIG_BOOTARGS "root=ramfs devfs=mount console=ttySA0,9600" */
/*#define CONFIG_ETHADDR 08:00:3e:26:0a:5b */
#define CONFIG_NETMASK 255.255.255.0
#define CONFIG_IPADDR 10.0.0.110
#define CONFIG_SERVERIP 10.0.0.1
/*#define CONFIG_BOOTFILE "elinos-lart" */
/*#define CONFIG_BOOTCOMMAND "tftp; bootm" */
#if (CONFIG_COMMANDS & CFG_CMD_KGDB)
#define CONFIG_KGDB_BAUDRATE 115200 /* speed to run kgdb serial port */
/* what's this ? it's not used anywhere */
#define CONFIG_KGDB_SER_INDEX 1 /* which serial port to use */
#endif
/*
* Miscellaneous configurable options
*/
#define CFG_LONGHELP /* undef to save memory */
#define CFG_PROMPT "SMDK2410 # " /* Monitor Command Prompt */
#define CFG_CBSIZE 256 /* Console I/O Buffer Size */
#define CFG_PBSIZE (CFG_CBSIZE+sizeof(CFG_PROMPT)+16) /* Print Buffer Size */
#define CFG_MAXARGS 16 /* max number of command args */
#define CFG_BARGSIZE CFG_CBSIZE /* Boot Argument Buffer Size */
#define CFG_MEMTEST_START 0x30000000 /* memtest works on */
#define CFG_MEMTEST_END 0x33F00000 /* 63 MB in DRAM */
#undef CFG_CLKS_IN_HZ /* everything, incl board info, in Hz */
#define CFG_LOAD_ADDR 0x33000000 /* default load address */
/* the PWM TImer 4 uses a counter of 15625 for 10 ms, so we need */
/* it to wrap 100 times (total 1562500) to get 1 sec. */
#define CFG_HZ 1562500
/* valid baudrates */
#define CFG_BAUDRATE_TABLE { 9600, 19200, 38400, 57600, 115200 }
/*-----------------------------------------------------------------------
* Stack sizes
*
* The stack sizes are set up in start.S using the settings below
*/
#define CONFIG_STACKSIZE (128*1024) /* regular stack */
#ifdef CONFIG_USE_IRQ
#define CONFIG_STACKSIZE_IRQ (4*1024) /* IRQ stack */
#define CONFIG_STACKSIZE_FIQ (4*1024) /* FIQ stack */
#endif
/*-----------------------------------------------------------------------
* Physical Memory Map
*/
#define CONFIG_NR_DRAM_BANKS 1 /* we have 1 bank of DRAM */
#define PHYS_SDRAM_1 0x30000000 /* SDRAM Bank #1 */
#define PHYS_SDRAM_1_SIZE 0x04000000 /* 64 MB */
#define PHYS_FLASH_1 0x00000000 /* Flash Bank #1 */
#define CFG_FLASH_BASE PHYS_FLASH_1
/*-----------------------------------------------------------------------
* FLASH and environment organization
*/
#define CONFIG_AMD_LV400 1 /* uncomment this if you have a LV400 flash */
#if 0
#define CONFIG_AMD_LV800 1 /* uncomment this if you have a LV800 flash */
#endif
#define CFG_MAX_FLASH_BANKS 1 /* max number of memory banks */
#ifdef CONFIG_AMD_LV800
#define PHYS_FLASH_SIZE 0x00100000 /* 1MB */
#define CFG_MAX_FLASH_SECT (19) /* max number of sectors on one chip */
#define CFG_ENV_ADDR (CFG_FLASH_BASE + 0x0F0000) /* addr of environment */
#endif
#ifdef CONFIG_AMD_LV400
#define PHYS_FLASH_SIZE 0x00080000 /* 512KB */
#define CFG_MAX_FLASH_SECT (11) /* max number of sectors on one chip */
#define CFG_ENV_ADDR (CFG_FLASH_BASE + 0x070000) /* addr of environment */
#endif
/* timeout values are in ticks */
#define CFG_FLASH_ERASE_TOUT (5*CFG_HZ) /* Timeout for Flash Erase */
#define CFG_FLASH_WRITE_TOUT (5*CFG_HZ) /* Timeout for Flash Write */
#define CFG_ENV_IS_IN_FLASH 1
#define CFG_ENV_SIZE 0x10000 /* Total Size of Environment Sector */
#endif /* __CONFIG_H */
在配置(make smdk2410 config)和编译(make all)之后生成了u-boot映像文件。
(2)、smdk2410开发板启动相关核心文件:
smdk2410启动主要分为两个阶段stage1和stage2。stage1主要在arm/arm920t/start.S中实现,stage2主要在lib_arm/board.c中实现。
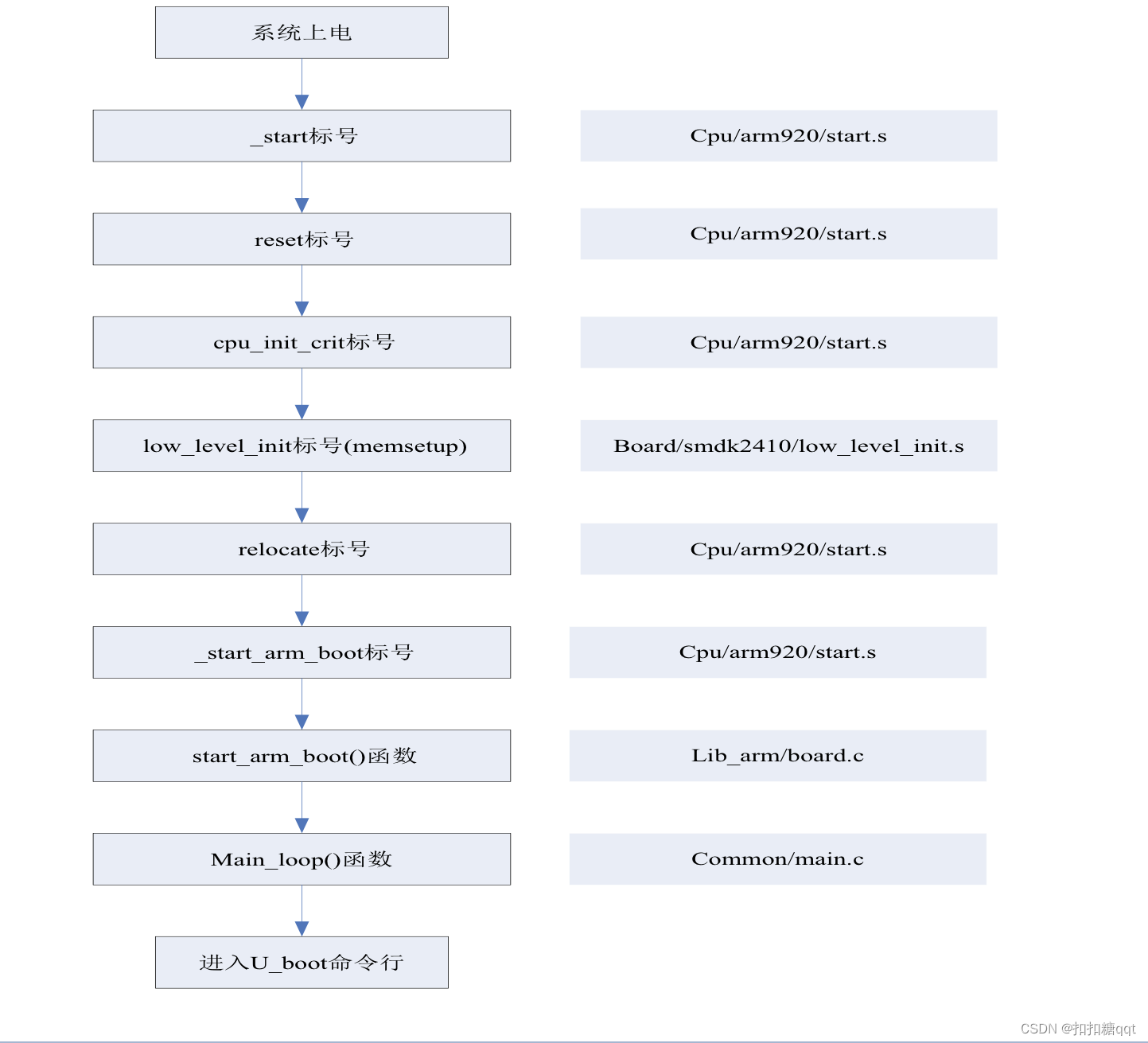
stage1
stage1的大概流程图如下图所示:
- 在u-boot-1.1.6/config.mk中定义了链接描述文件相关代码,主要代码如下所示:
ifeq ($(CONFIG_NAND_U_BOOT),y)
LDSCRIPT := $(TOPDIR)/board/$(BOARDDIR)/u-boot-nand.lds
else
LDSCRIPT := $(TOPDIR)/board/$(BOARDDIR)/u-boot.lds
endif
LDFLAGS += -Bstatic -T $(LDSCRIPT) -Ttext $(TEXT_BASE) $(PLATFORM_LDFLAGS)
可以在u-boot-1.1.6/board/smdk2410中看到u-boot.lds连接描述文件
- 在u-boot-1.1.6/board/smdk2410/u-boot.lds链接描述文件中输出体系结构是arm,随后定义了u-boot启动的程序入口,即ENTRY(_start),随后链接代码段,即cpu/arm920t/start.o(启动文件) ,再往后连接rodata、data、got段,随后连接uboot的指令,最后连接bss段。根据链接文件描述,去u-boot-1.1.6/cpu/arm920t/目录下寻找启动文件,进入第三步
OUTPUT_ARCH(arm)
ENTRY(_start)
SECTIONS
{
. = 0x00000000;
. = ALIGN(4);
.text :
{
cpu/arm920t/start.o (.text)
*(.text)
}
. = ALIGN(4);
.rodata : { *(.rodata) }
. = ALIGN(4);
.data : { *(.data) }
. = ALIGN(4);
.got : { *(.got) }
. = .;
__u_boot_cmd_start = .;
.u_boot_cmd : { *(.u_boot_cmd) }
__u_boot_cmd_end = .;
. = ALIGN(4);
__bss_start = .;
.bss : { *(.bss) }
_end = .;
}
- 进入u-boot-1.1.6/cpu/arm920t/start.s中的_start,即是u-boot的入口程序,入口程序部分代码如下所示:
.globl _start
_start: b reset
ldr pc, _undefined_instruction
ldr pc, _software_interrupt
ldr pc, _prefetch_abort
ldr pc, _data_abort
ldr pc, _not_used
ldr pc, _irq
ldr pc, _fiq
可以看到b reset,b相当于goto语句,因此进入reset中去,start.s中的reset代码如下所示:
reset:
/*
* set the cpu to SVC32 mode
*/
mrs r0,cpsr
bic r0,r0,#0x1f
orr r0,r0,#0xd3
msr cpsr,r0
/* turn off the watchdog */
#if defined(CONFIG_S3C2400)
# define pWTCON 0x15300000
# define INTMSK 0x14400008 /* Interupt-Controller base addresses */
# define CLKDIVN 0x14800014 /* clock divisor register */
#elif defined(CONFIG_S3C2410)
# define pWTCON 0x53000000
# define INTMSK 0x4A000008 /* Interupt-Controller base addresses */
# define INTSUBMSK 0x4A00001C
# define CLKDIVN 0x4C000014 /* clock divisor register */
#endif
cpsr是cpu中32位的程序状态寄存器,可控制处理器的工作模式、处理器的中断以及对应指令执行时的条件。
mrs r0,cpsr把cpsr中的值读入r0中,后两句bic r0,r0,#0x1f,orr r0,r0,#0xd3改变r0的值,msr cpsr,r0将r0的值再写入cpsr中,设置arm处理器的工作模式为32位管理模式。
再往下,关闭看门狗,因为当前为smdk2410,所以进入elif defined(CONFIG_S3C2410)。
再定义若干控制寄存器:
pWTCON为看门狗控制寄存器(用于改变看门狗状态),INTMSK为中断的控制寄存器,INTSUBMSK为子中断控制寄存器,CLKDIVN为分屏时钟控制寄存器。
继续分析start.s中的代码:
#if defined(CONFIG_S3C2400) || defined(CONFIG_S3C2410)
ldr r0, =pWTCON
mov r1, #0x0
str r1, [r0]
/*
* mask all IRQs by setting all bits in the INTMR - default
*/
mov r1, #0xffffffff
ldr r0, =INTMSK
str r1, [r0]
# if defined(CONFIG_S3C2410)
ldr r1, =0x3ff
ldr r0, =INTSUBMSK
str r1, [r0]
# endif
ldr r0, =pWTCON将看门狗控制寄存器的地址存入r0,mov r1, #0x0用于将r1寄存器的值清0,str r1, [r0]用于将r1寄存器的值存入r0所代表的地址(即看门狗控制寄存器)中。即三句话的含义就是把看门狗控制寄存器值赋0(寄存器值为0,代表看门狗状态为关闭状态),即将看门狗关闭。
mov r1, #0xffffffff ldr r0, =INTMSK str r1, [r0],即把中断控制寄存器的所有状态位置位1,即代表不响应任何中断源。随后将INTSUBMSK子中断寄存器的值都置为1,即子中断源也不响应,所以关中断。
下一步设置cpu主频,代码如下所示:
/* FCLK:HCLK:PCLK = 1:2:4 */
/* default FCLK is 120 MHz ! */
ldr r0, =CLKDIVN
mov r1, #3
str r1, [r0]
如上述代码所示,即设置CPU的主频为120MHZ。
继续往下,代码如下所示:
#ifndef CONFIG_SKIP_LOWLEVEL_INIT
bl cpu_init_crit
#endif
条件编译,调用cpu_init_crit,该方法的代码如下所示:
cpu_init_crit:
/*
* flush v4 I/D caches
*/
mov r0, #0
mcr p15, 0, r0, c7, c7, 0 /* flush v3/v4 cache */
mcr p15, 0, r0, c8, c7, 0 /* flush v4 TLB */
/*
* disable MMU stuff and caches
*/
mrc p15, 0, r0, c1, c0, 0
bic r0, r0, #0x00002300 @ clear bits 13, 9:8 (--V- --RS)
bic r0, r0, #0x00000087 @ clear bits 7, 2:0 (B--- -CAM)
orr r0, r0, #0x00000002 @ set bit 2 (A) Align
orr r0, r0, #0x00001000 @ set bit 12 (I) I-Cache
mcr p15, 0, r0, c1, c0, 0
/*
* before relocating, we have to setup RAM timing
* because memory timing is board-dependend, you will
* find a lowlevel_init.S in your board directory.
*/
mov ip, lr
bl lowlevel_init
mov lr, ip
mov pc, lr
前三个指令:mov r0, #0 mcr p15, 0, r0, c7, c7, 0 mcr p15, 0, r0, c8, c7, 0对p15寄存器操作,实现关闭指令cache和数据cache
随后六个指令,关闭MMUmrc p15, 0, r0, c1, c0, 0 bic r0, r0, #0x00002300 @ clear bits 13, 9:8 (--V- --RS) bic r0, r0, #0x00000087 @ clear bits 7, 2:0 (B--- -CAM) orr r0, r0, #0x00000002 @ set bit 2 (A) Align orr r0, r0, #0x00001000 @ set bit 12 (I) I-Cache mcr p15, 0, r0, c1, c0, 0
随后四条指令,前两条指令mov ip, lr bl lowlevel_init,将lr寄存器的值复制到ip中,并跳转到lowlevel_init这段代码 ,可以看到在u-boot-1.1.6/board/smdk2410/lowlevel_init.S这个文件的代码中,有相应的代码段
#define BWSCON 0x48000000
lowlevel_init:
/* memory control configuration */
/* make r0 relative the current location so that it */
/* reads SMRDATA out of FLASH rather than memory ! */
ldr r0, =SMRDATA
ldr r1, _TEXT_BASE
sub r0, r0, r1
ldr r1, =BWSCON /* Bus Width Status Controller */
add r2, r0, #13*4
0:
ldr r3, [r0], #4
str r3, [r1], #4
cmp r2, r0
bne 0b
/* everything is fine now */
mov pc, lr
.ltorg
/* the literal pools origin */
r0指向SMRDATA代码段的开始,给r1赋值地址0x48000000(控制寄存器的起始地址),r2指向SMRDATA代码段的结尾,
随后五行,从0:开始,是循环写值的功能,ldr r3, [r0], #4把r0指向的值给r3,r0指向下一条,再把r3的值赋给r1,再让r1指向下一条,比较r2和r0,如若不一致,则循环,否则跳出循环。最后的作用是将要写的数据放到以内存0x48000000地址开始的位置上,即将RAM和flash的13个控制寄存器赋值。最后实现存储器控制寄存器的配置。
mov pc, lr表示lowlevel_init执行结束,返回start.s中的代码,即继续执行mov lr, ip mov pc, lr这两个命令即代表该程序段也执行结束,回到上一个跳转指令的位置。
继续往下执行,代码如下所示:
#ifndef CONFIG_SKIP_RELOCATE_UBOOT
relocate: /* relocate U-Boot to RAM */
adr r0, _start /* r0 <- current position of code */
ldr r1, _TEXT_BASE /* test if we run from flash or RAM */
cmp r0, r1 /* don't reloc during debug */
beq stack_setup
ldr r2, _armboot_start
ldr r3, _bss_start
sub r2, r3, r2 /* r2 <- size of armboot */
add r2, r0, r2 /* r2 <- source end address */
copy_loop:
ldmia r0!, {r3-r10} /* copy from source address [r0] */
stmia r1!, {r3-r10} /* copy to target address [r1] */
cmp r0, r2 /* until source end addreee [r2] */
ble copy_loop
#endif /* CONFIG_SKIP_RELOCATE_UBOOT */
上述代码实现重定位,adr r0, _start ldr r1, _TEXT_BASE(_TEXT_BASE在board/smdk2410/config.mk中定义),r0为当前地址,r1为连接地址,如果uboot已在RAM中,则二者一致;如果不相等,则uboot在flash中。即如若不相等,则执行后四条指令ldr r2, _armboot_start ldr r3, _bss_start sub r2, r3, r2 /* r2 <- size of armboot */ add r2, r0, r2需要进行拷贝,即将uboot从flash拷贝到RAM中。r2是代码段的开始,r3是bss段的开始,代码段的结束,r3-r2则可以知道代码段的长度,r0+r2可以得到代码段的结束位。
copy_loop借助r0、r1和r2三个寄存器,进入循环语句,实现将uboot从flash拷贝到RAM中。
如若已经拷贝完全,则进入下一条命令,即stack_setup栈的初始化,并将bss段清0:
stack_setup:
ldr r0, _TEXT_BASE /* upper 128 KiB: relocated uboot */
sub r0, r0, #CFG_MALLOC_LEN /* malloc area */
sub r0, r0, #CFG_GBL_DATA_SIZE /* bdinfo */
clear_bss:
ldr r0, _bss_start /* find start of bss segment */
ldr r1, _bss_end /* stop here */
mov r2, #0x00000000 /* clear */
随后进入该语句,即跳转到_start_armboot这条指令去执行,即进入uboot的stage2去执行
ldr pc, _start_armboot
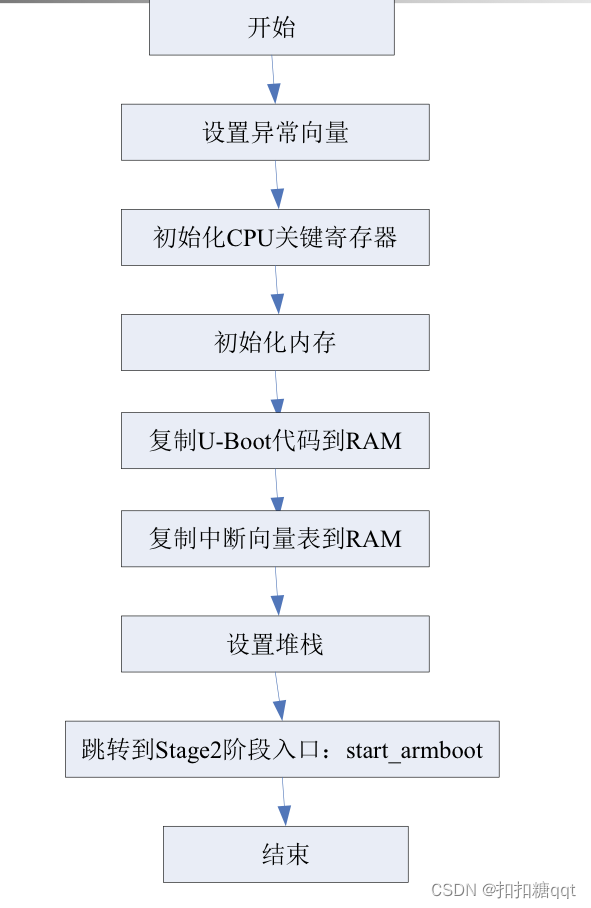
stage2
stage2的基本流程如下图所示:
_start_armboot在u-boot-1.1.6/lib_arm/board.c中,代码如下所示:
void start_armboot (void)
{
init_fnc_t **init_fnc_ptr;
char *s;
#ifndef CFG_NO_FLASH
ulong size;
#endif
#if defined(CONFIG_VFD) || defined(CONFIG_LCD)
unsigned long addr;
#endif
/* Pointer is writable since we allocated a register for it */
gd = (gd_t*)(_armboot_start - CFG_MALLOC_LEN - sizeof(gd_t));
/* compiler optimization barrier needed for GCC >= 3.4 */
__asm__ __volatile__("": : :"memory");
memset ((void*)gd, 0, sizeof (gd_t));
gd->bd = (bd_t*)((char*)gd - sizeof(bd_t));
memset (gd->bd, 0, sizeof (bd_t));
monitor_flash_len = _bss_start - _armboot_start;
for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) {
if ((*init_fnc_ptr)() != 0) {
hang ();
}
}
#ifndef CFG_NO_FLASH
/* configure available FLASH banks */
size = flash_init ();
display_flash_config (size);
#endif /* CFG_NO_FLASH */
#ifdef CONFIG_VFD
# ifndef PAGE_SIZE
# define PAGE_SIZE 4096
# endif
/*
* reserve memory for VFD display (always full pages)
*/
/* bss_end is defined in the board-specific linker script */
addr = (_bss_end + (PAGE_SIZE - 1)) & ~(PAGE_SIZE - 1);
size = vfd_setmem (addr);
gd->fb_base = addr;
#endif /* CONFIG_VFD */
#ifdef CONFIG_LCD
# ifndef PAGE_SIZE
# define PAGE_SIZE 4096
# endif
/*
* reserve memory for LCD display (always full pages)
*/
/* bss_end is defined in the board-specific linker script */
addr = (_bss_end + (PAGE_SIZE - 1)) & ~(PAGE_SIZE - 1);
size = lcd_setmem (addr);
gd->fb_base = addr;
#endif /* CONFIG_LCD */
/* armboot_start is defined in the board-specific linker script */
mem_malloc_init (_armboot_start - CFG_MALLOC_LEN);
#if (CONFIG_COMMANDS & CFG_CMD_NAND)
puts ("NAND: ");
nand_init(); /* go init the NAND */
#endif
#ifdef CONFIG_HAS_DATAFLASH
AT91F_DataflashInit();
dataflash_print_info();
#endif
/* initialize environment */
env_relocate ();
#ifdef CONFIG_VFD
/* must do this after the framebuffer is allocated */
drv_vfd_init();
#endif /* CONFIG_VFD */
/* IP Address */
gd->bd->bi_ip_addr = getenv_IPaddr ("ipaddr");
/* MAC Address */
{
int i;
ulong reg;
char *s, *e;
char tmp[64];
i = getenv_r ("ethaddr", tmp, sizeof (tmp));
s = (i > 0) ? tmp : NULL;
for (reg = 0; reg < 6; ++reg) {
gd->bd->bi_enetaddr[reg] = s ? simple_strtoul (s, &e, 16) : 0;
if (s)
s = (*e) ? e + 1 : e;
}
#ifdef CONFIG_HAS_ETH1
i = getenv_r ("eth1addr", tmp, sizeof (tmp));
s = (i > 0) ? tmp : NULL;
for (reg = 0; reg < 6; ++reg) {
gd->bd->bi_enet1addr[reg] = s ? simple_strtoul (s, &e, 16) : 0;
if (s)
s = (*e) ? e + 1 : e;
}
#endif
}
devices_init (); /* get the devices list going. */
#ifdef CONFIG_CMC_PU2
load_sernum_ethaddr ();
#endif /* CONFIG_CMC_PU2 */
jumptable_init ();
console_init_r (); /* fully init console as a device */
#if defined(CONFIG_MISC_INIT_R)
/* miscellaneous platform dependent initialisations */
misc_init_r ();
#endif
/* enable exceptions */
enable_interrupts ();
/* Perform network card initialisation if necessary */
#ifdef CONFIG_DRIVER_CS8900
cs8900_get_enetaddr (gd->bd->bi_enetaddr);
#endif
#if defined(CONFIG_DRIVER_SMC91111) || defined (CONFIG_DRIVER_LAN91C96)
if (getenv ("ethaddr")) {
smc_set_mac_addr(gd->bd->bi_enetaddr);
}
#endif /* CONFIG_DRIVER_SMC91111 || CONFIG_DRIVER_LAN91C96 */
/* Initialize from environment */
if ((s = getenv ("loadaddr")) != NULL) {
load_addr = simple_strtoul (s, NULL, 16);
}
#if (CONFIG_COMMANDS & CFG_CMD_NET)
if ((s = getenv ("bootfile")) != NULL) {
copy_filename (BootFile, s, sizeof (BootFile));
}
#endif /* CFG_CMD_NET */
#ifdef BOARD_LATE_INIT
board_late_init ();
#endif
#if (CONFIG_COMMANDS & CFG_CMD_NET)
#if defined(CONFIG_NET_MULTI)
puts ("Net: ");
#endif
eth_initialize(gd->bd);
#endif
/* main_loop() can return to retry autoboot, if so just run it again. */
for (;;) {
main_loop ();
}
/* NOTREACHED - no way out of command loop except booting */
}
在这段代码中,也是进行了一系列的初始化,主要执行包括:
(1)、顺序执行init_sequence数组中的初始化函数
(2)、配置可用的flash
(3)、配置环境变量
(4)、初始化开发板设备
(5)、初始化跳转表
(6)、初始化控制台
最后进入main_loop()函数。main_loop()函数主要功能就是加载内核加命令解析。
init_sequence数组中包含初始化函数指针,具体代码如下所示:
init_fnc_t *init_sequence[] = {
cpu_init, /* basic cpu dependent setup */
board_init, /* basic board dependent setup */
interrupt_init, /* set up exceptions */
env_init, /* initialize environment */
init_baudrate, /* initialze baudrate settings */
serial_init, /* serial communications setup */
console_init_f, /* stage 1 init of console */
display_banner, /* say that we are here */
#if defined(CONFIG_DISPLAY_CPUINFO)
print_cpuinfo, /* display cpu info (and speed) */
#endif
#if defined(CONFIG_DISPLAY_BOARDINFO)
checkboard, /* display board info */
#endif
dram_init, /* configure available RAM banks */
display_dram_config,
NULL,
};
上述数组中,包括基本的初始化函数指针,其中包括基本的处理器相关配置初始化(cpu_init)、基本的板级相关配置初始化(board_init)、初始化例外处理(interrupt_init),初始化环境变量(env_init),初始化波特率设置(init_baudrate),串口通讯设置初始化(serial_init),控制台初始化(console_init_f),打印u-boot信息(display_banner),配置可用的RAM(dram_init),显示RAM的配置大小(display_dram_config)。
在start_armboot函数中遍历sequence数组,实现初始化。
三、总结
通过本次作业,深入的去了解u-boot-1.1.6的启动代码,分析了smdk2410开发板的相关核心代码,主要还是分析u-boot-1.1.6/arm/arm920t/start.S和u-boot-1.1.6/lib_arm/board.c这两个文件,虽然汇编代码比较晦涩难懂,但通过查阅资料和听老师的录播课程还是解决了一些在看代码过程中遇到的困难,通过深入分析代码,让我对嵌入式Linux这门课的理解更加深刻,知识得到了增长。
最后
以上就是顺利向日葵最近收集整理的关于嵌入式Linux作业二分析u-boot-1.1.6在smdk2410开发板上的启动代码嵌入式Linux实验作业要求一、作业分析二、实验步骤三、总结的全部内容,更多相关嵌入式Linux作业二分析u-boot-1.1.6在smdk2410开发板上内容请搜索靠谱客的其他文章。








发表评论 取消回复