前言
在Ubuntu16.04 系统安装ROS Kinetic,可以根据官方教程安装;如果不fan-qiang,安装速度很慢,更大概率还安装不上。网上可有很多教程使用国内源来安装,尝试过后,发现也太不稳定。后来在网上看到一个新方法,能解决速度慢问题,还能提供成功安装概率。
目录
一、添加raw.githubusercontent.com 最近的IP地址
二、安装安装ROS Kinetic
三、测试是否安装成功
补充:sudo rosdep init 报错
一、添加raw.githubusercontent.com 最近的IP地址
这个网站raw.githubusercontent.com,是安装国外版的ROS Kinetic需用到的,会在上面下载一些依赖包;不幸的是raw.githubusercontent.com被国内封锁了,如果不翻墙很难访问到。
1、登录https://www.ip138.com/ 输入raw.githubusercontent.com ,能查询到其他的ip可以用:

通常选择第一个比较快,当然也要考虑距离、是否封锁等其他因素;这里我选择东京的IP地址
151.101.108.133
2、然后编辑ubuntu的 hosts文件(sudo vi /etc/hosts),打开在其最下面添加一句,保存并退出。
151.101.108.133 raw.githubusercontent.com
二、安装安装ROS Kinetic
这里安装官网的顺序安装即可:
官网安装参考
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
sudo apt install python-rosdep
sudo rosdep init
rosdep update
如果sudo rosdep init 报错了请看:补充:sudo rosdep init 报错
三、测试是否安装成功
测试小海龟
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
参考:https://www.cnblogs.com/robohou/p/13371433.html (致敬)
参考:https://blog.csdn.net/weixin_43288910/article/details/105627358(致敬)
参考:http://wiki.ros.org/kinetic/Installation/Ubuntu(官方)
补充:sudo rosdep init 报错
ERROR: cannot download default sources list from: https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list Website may be down.

报错原因是GitHub的raw.githubusercontent.com无法连接,需要解决GitHub的raw.githubusercontent.com无法连接问题
通过IPAddress.com首页,输入raw.githubusercontent.com查询到真实IP地址
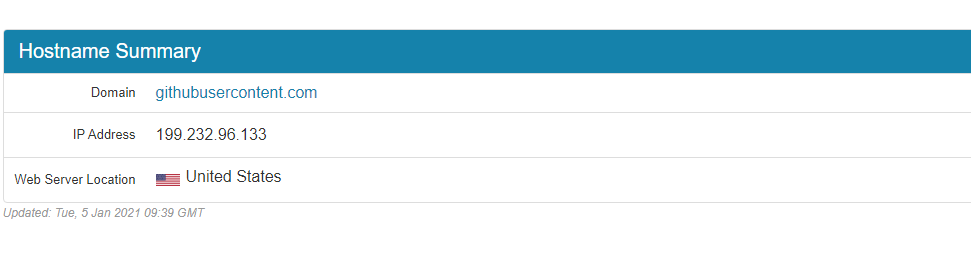
修改hosts Ubuntu,
sudo vi /etc/hosts
把 151.101.108.133 raw.githubusercontent.com 改为以下内容,保存即可
199.232.28.133 raw.githubusercontent.com
然后输入sudo rosdep init就可以了。
最后
以上就是正直书包最近收集整理的关于Ubuntu16.04 安装ROS Kinetic(完善网络版)的全部内容,更多相关Ubuntu16.04内容请搜索靠谱客的其他文章。








发表评论 取消回复