PnP(Perspective-n-Point)问题的几何结构如图1所示,给定3D点的坐标、对应2D点坐标以及内参矩阵,求解相机的位姿。
数学语言描述如下:
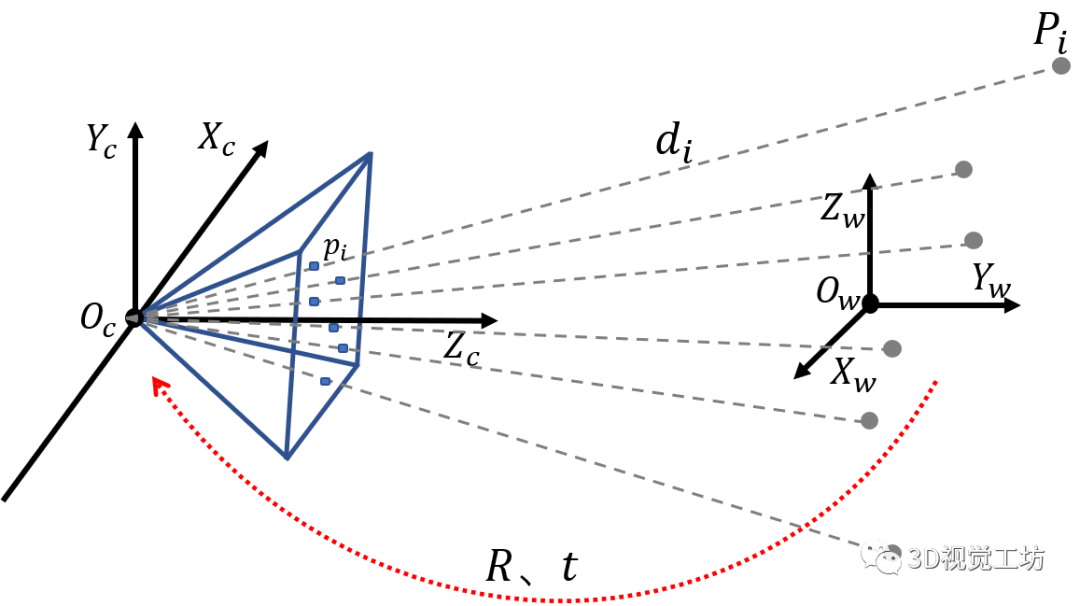
图1.PnP几何结构
1.直接线性变换法(Direct Linear Transform,DLT)
假设:摄像机已经校准过了。
已知:

求解相机的外参:R、t
透视投影模型为:
最后
以上就是拉长板栗最近收集整理的关于一文详解PnP算法原理的全部内容,更多相关一文详解PnP算法原理内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复