一、点乘(内积)
有向量
a
⃗
=
(
x
1
,
y
1
)
,
b
⃗
=
(
x
2
,
y
2
)
vec a=(x_1,y_1),vec b=(x_2,y_2)
a=(x1,y1),b=(x2,y2),夹角为
θ
theta
θ,内积为:
a
⃗
⋅
b
⃗
=
∣
a
⃗
∣
∣
b
⃗
∣
cos
θ
=
x
1
x
2
+
y
1
y
2
vec a cdot vec b=|vec a||vec b|costheta=x_1x_2 + y_1y_2
a⋅b=∣a∣∣b∣cosθ=x1x2+y1y2
几何意义:
- 夹角,由 a ⃗ ⋅ b ⃗ = ∣ a ⃗ ∣ ∣ b ⃗ ∣ cos θ vec a cdot vec b=|vec a||vec b|costheta a⋅b=∣a∣∣b∣cosθ 知,当内积 > 0 >0 >0, θ < 9 0 ∘ theta<90^circ θ<90∘,内积 < 0 <0 <0, θ > 9 0 ∘ theta>90^circ θ>90∘,内积 = 0 =0 =0, θ = 9 0 ∘ theta=90^circ θ=90∘。同时也可以计算 θ theta θ 的值: θ = a r c c o s a ⃗ ⋅ b ⃗ ∣ a ⃗ ∣ ∣ b ⃗ ∣ theta=arccosfrac {vec a cdot vec b}{|vec a||vec b|} θ=arccos∣a∣∣b∣a⋅b
- 投影,
∣
a
⃗
∣
cos
θ
=
a
⃗
⋅
b
⃗
∣
b
⃗
∣
|vec a|costheta=frac {vec a cdot vec b}{|vec b|}
∣a∣cosθ=∣b∣a⋅b 表示
a
⃗
vec a
a 在
b
⃗
vec b
b 上的投影。
对偶性: a ⃗ ⋅ b ⃗ = ∣ a ⃗ ∣ ( ∣ b ⃗ ∣ cos θ ) = ∣ b ⃗ ∣ ( ∣ a ⃗ ∣ cos θ ) vec a cdot vec b=|vec a|(|vec b|costheta)=|vec b|(|vec a|costheta) a⋅b=∣a∣(∣b∣cosθ)=∣b∣(∣a∣cosθ)
∣ a ⃗ ∣ ( ∣ b ⃗ ∣ cos θ ) |vec a|(|vec b|costheta) ∣a∣(∣b∣cosθ) 的理解是 a ⃗ vec a a 的长度与 b ⃗ vec b b 在 a ⃗ vec a a 上的投影的乘积;
∣ b ⃗ ∣ ( ∣ a ⃗ ∣ cos θ ) |vec b|(|vec a|costheta) ∣b∣(∣a∣cosθ) 的理解是 b ⃗ vec b b 的长度与 a ⃗ vec a a 在 b ⃗ vec b b 上的投影的乘积;
而这两个是相等的。
二、叉乘(外积)
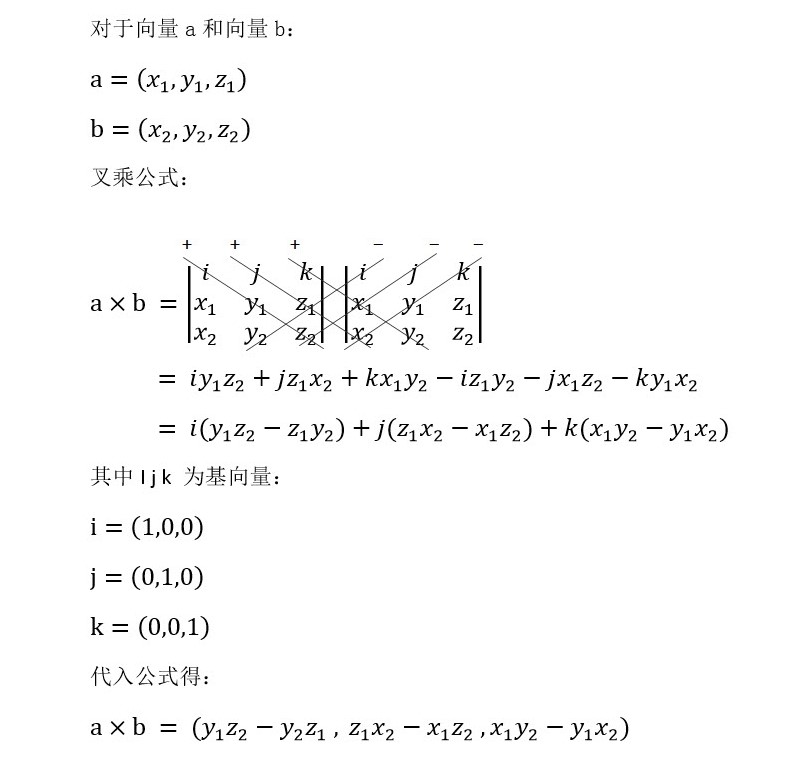
上面的公式,就是求三阶行列式。
几何意义:
- 上面如果不把
i
⃗
,
j
⃗
,
k
⃗
vec i,vec j,vec k
i,j,k 的具体指带入公式,而是写成
a
⃗
×
b
⃗
=
m
i
⃗
+
n
j
⃗
+
l
k
⃗
vec a times vec b=mvec i+nvec j+lvec k
a×b=mi+nj+lk 的形式,向量
(
m
,
n
,
l
)
(m,n,l)
(m,n,l) 就是一个同时垂直
a
⃗
vec a
a 和
b
⃗
vec b
b 的向量,如下图:
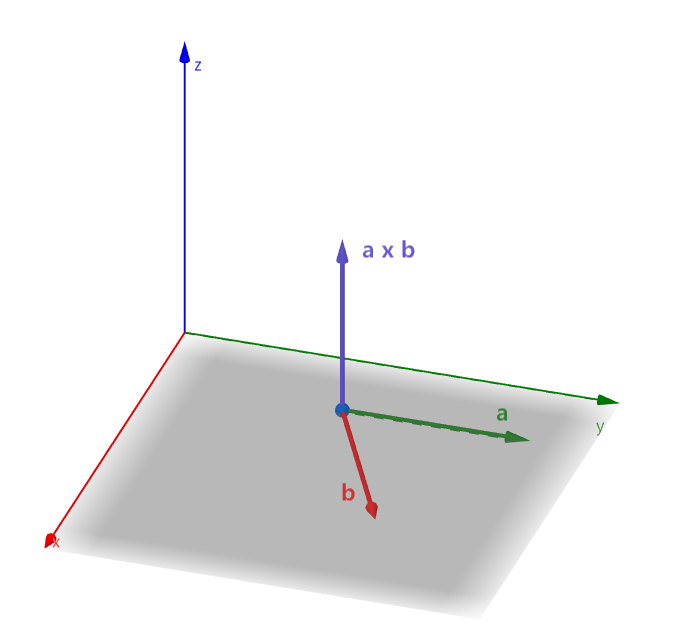
- 对于二维向量,
a
⃗
=
(
x
1
,
y
1
)
,
b
⃗
=
(
x
2
,
y
2
)
vec a=(x_1,y_1),vec b=(x_2,y_2)
a=(x1,y1),b=(x2,y2),按照上面的公式得:
a ⃗ × b ⃗ = ∣ x 1 y 1 x 2 y 2 ∣ = x 1 y 2 − x 2 y 1 vec a times vec b=begin{vmatrix} x_1 & y_1 \ x_2 & y_2 \ end{vmatrix}=x_1y_2-x_2y_1 a×b=∣∣∣∣x1x2y1y2∣∣∣∣=x1y2−x2y1,设这个数值为 m m m。
则, ∣ m ∣ = ∣ a × b ∣ = ∣ a ∣ ∣ b ∣ sin θ |m|=|a×b|=|a| |b|sintheta ∣m∣=∣a×b∣=∣a∣∣b∣sinθ ( θ theta θ为 a ⃗ vec a a 和 b ⃗ vec b b 的夹角)
且,|m| = a ⃗ vec a a 和 b ⃗ vec b b构成的平行四边形的面积 ,如下图:
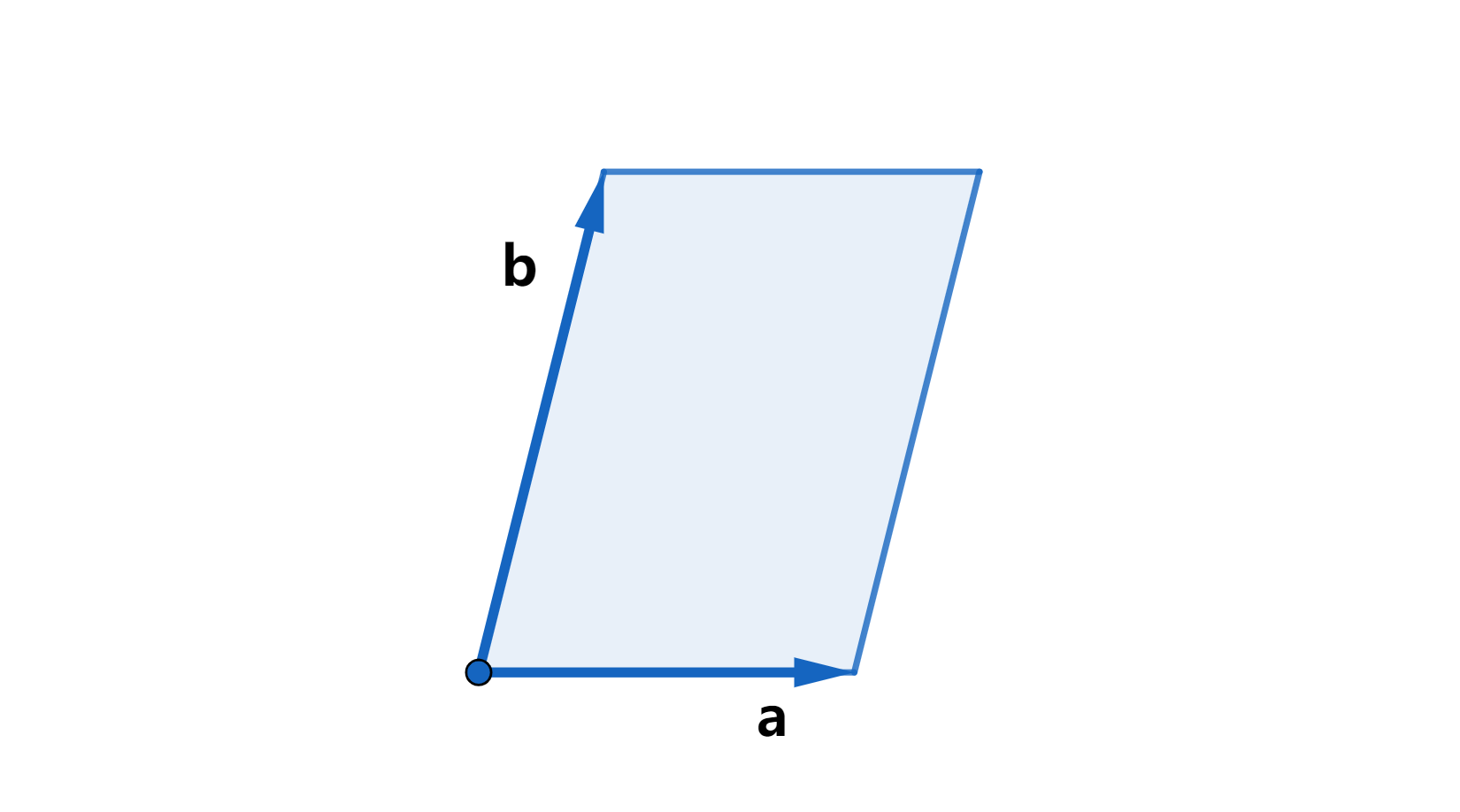
- 判断向量的相对位置(顺逆时针)
a ⃗ vec a a 和 b ⃗ vec b b 如图所示:
如果让
a
⃗
vec a
a 以最小角度转到
b
⃗
vec b
b 的方向,是顺时针还是逆时针呢,从图中很容易看出,但怎么用数字判断呢?
仍然是
m
=
a
⃗
×
b
⃗
=
x
1
y
2
−
x
2
y
1
m=vec a times vec b=x_1y_2-x_2y_1
m=a×b=x1y2−x2y1,
当
m
>
0
m>0
m>0,
a
⃗
vec a
a 逆时针转到
b
⃗
vec b
b 的角度
<
18
0
∘
<180^circ
<180∘,
当
m
<
0
m<0
m<0,
a
⃗
vec a
a 逆时针转到
b
⃗
vec b
b 的角度
>
18
0
∘
>180^circ
>180∘,
当
m
=
0
m=0
m=0,
a
⃗
vec a
a 和
b
⃗
vec b
b 共线。
直观记忆如下图:
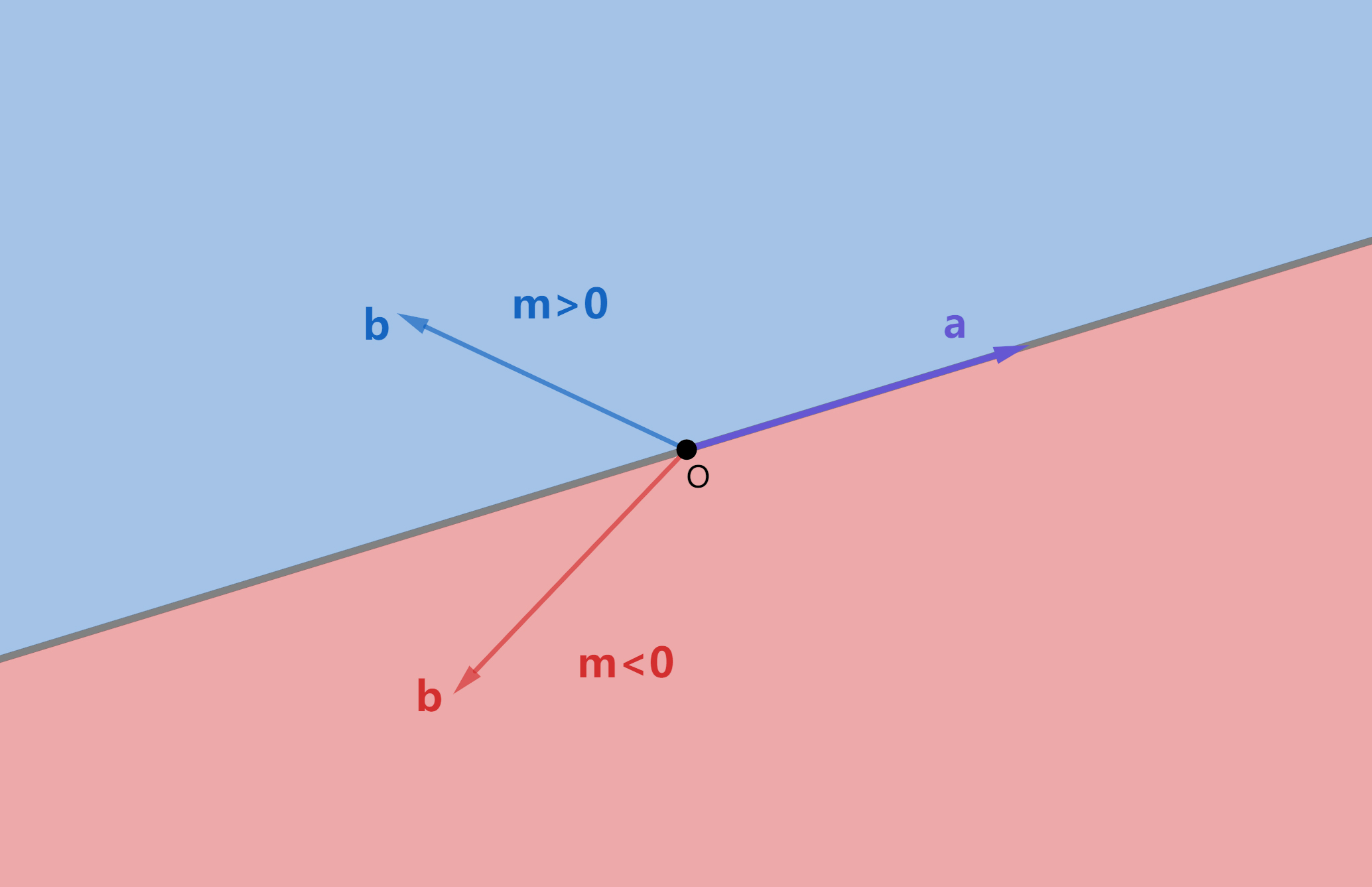
m
>
0
m>0
m>0,
b
⃗
vec b
b 在蓝色部分;
m
<
0
m<0
m<0,
b
⃗
vec b
b 在红色部分;
m
=
0
m=0
m=0,
b
⃗
vec b
b 在分界线上(与
a
⃗
vec a
a 共线 )。
三、扩展(坐标系引发的顺逆指针分不清事件)
我们平时默认的坐标系是这样的:

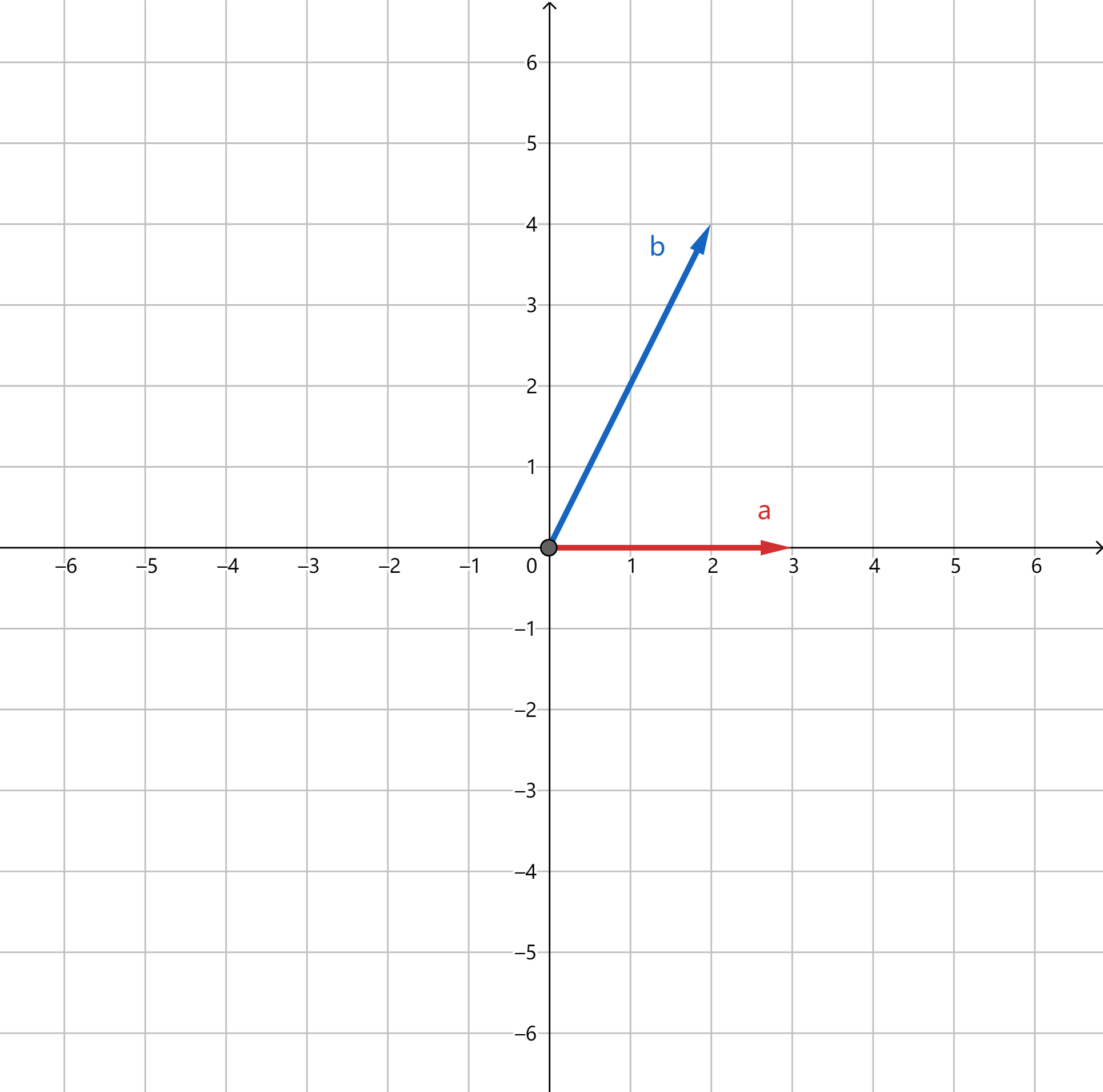
但有时候的坐标系是这样的(比如数字图像中):
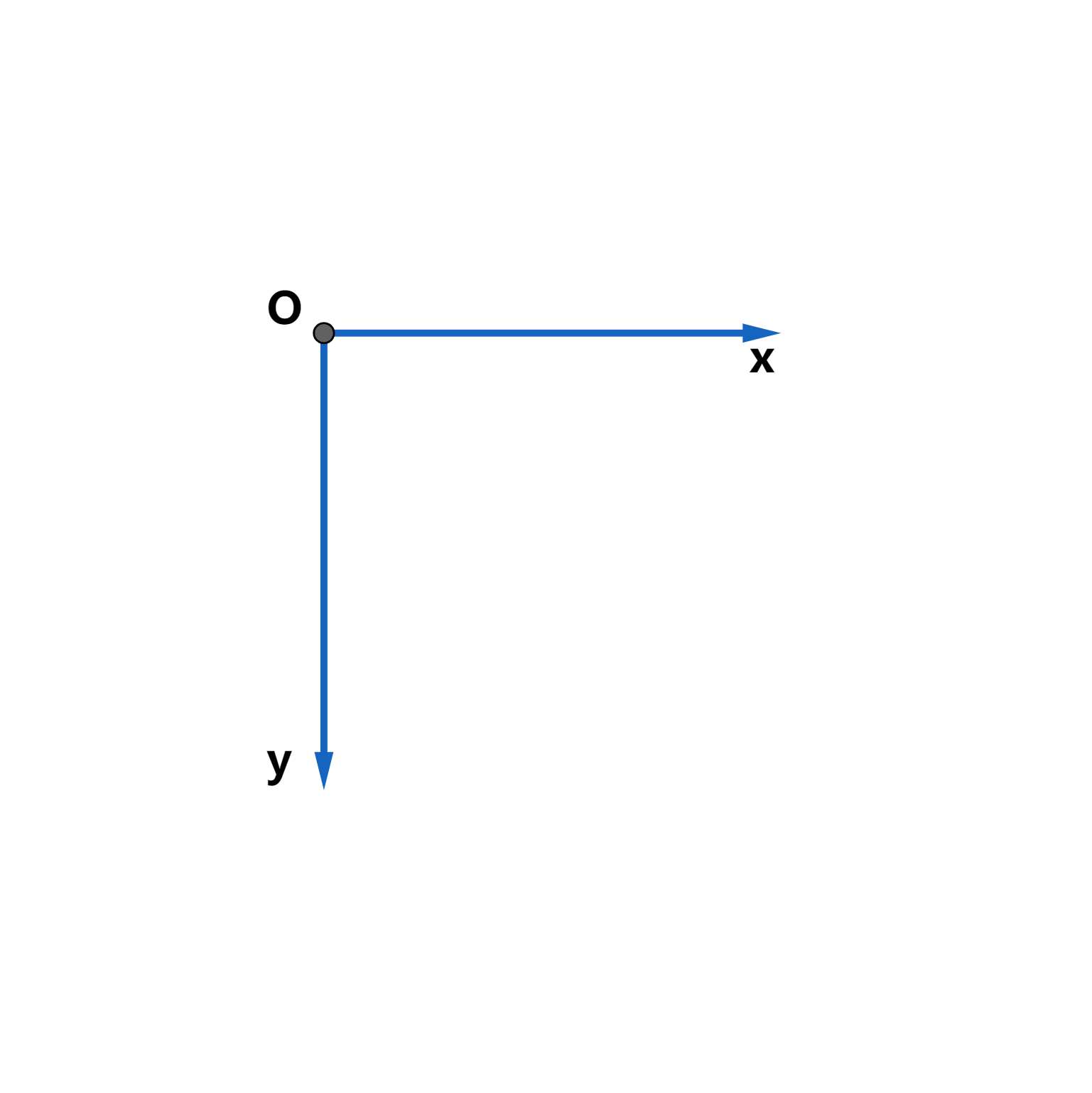
可以发现,同样的
a
⃗
=
(
2
,
1
)
vec a=(2,1)
a=(2,1) 转到
b
⃗
=
(
1
,
2
)
vec b=(1,2)
b=(1,2) ,在上面的坐标系中就是逆时针,而在下面的坐标系中就是顺时针,所以为了统一说明,定义了 “正旋转” :从
x
x
x 轴旋转到
y
y
y 轴的方向。
所以,上面利用向量叉乘判断向量相对位置的性质描述应该为:
当
m
>
0
m>0
m>0,
a
⃗
vec a
a 正旋转到
b
⃗
vec b
b 的角度
<
18
0
∘
<180^circ
<180∘,
当
m
<
0
m<0
m<0,
a
⃗
vec a
a 正旋转到
b
⃗
vec b
b 的角度
>
18
0
∘
>180^circ
>180∘,
当
m
=
0
m=0
m=0,
a
⃗
vec a
a 和
b
⃗
vec b
b 共线。
而那张直观记忆图只在我们平时默认的坐标系中才成立。
最后
以上就是健忘小白菜最近收集整理的关于向量的内积外积与其几何意义的全部内容,更多相关向量内容请搜索靠谱客的其他文章。








发表评论 取消回复