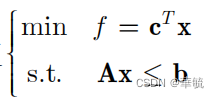
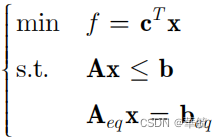
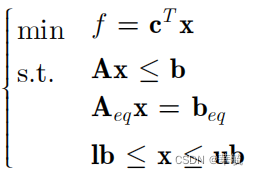
Matlab求解线性问题LP(Liner programming)标准型
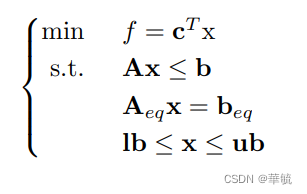
上述模型为用Matlab求解线性问题的标准型
1、模型由一个极小化的目标函数f,以及需要满足的约束条件构成。约束条件分为等式约束、不等式约束和边界约束。
2、假设决策变量x为n维的,且线性规划问题有m1个不等式约束,m2个等式约束。那么:c、x、lb和ub均为n维列向量,b为m1维列向量,beq为m2维列向量,A为m1×n维矩阵,Aeq为m2×n维矩阵。
ps:(关于c和x,因为矩阵相乘必须是前一个矩阵的列数等于后一个矩阵的行数,而向量都是用列向量来定义的。因而c和x必须是同维的列向量,向量C经过转置后变成n维的行向量,此时便可与n维列向量的x相乘了。)
(lb、ub与x一样也是n维的列向量,向量x大于等于向量xb,小于等于向量ub的意思是,拿向量x中的每个元素与向量lb和ub中的各个元素来做对比的)比如:

输出的结果为逻辑值。
(至于A、Aeq。如果有m1个不等式约束,那么A一定是一个m1行×n列的矩阵,因为矩阵相乘要求前一个矩阵的列等于后一个矩阵的行。比如说共有m1=4个不等式约束分别为ma、mb、mc和md,那么A的行数一定是m1=4,如下图)
%ma、mb、mc、md为四个不等式约束,x为1行3列的向量
ma=[1 2 3]; mb=[2 3 4]; mc=[3 4 5];md=[4 5 6]; x=[2;2;2];
%分别将4个不等式约束与x相乘
ba=ma*x %表示1x1+2x2+3x3即第一个约束
bb=mb*x %表示2x1+3x2+4x3即第二个约束
bc=mc*x %表示3x1+4x2+5x3即第三个约束
bd=md*x %表示4x1+5x2+6x3即第四个约束
%A为这四个约束集合一起组成的矩阵
A=[ma;mb;mc;md]
AX=m1*x
运行结果如下:
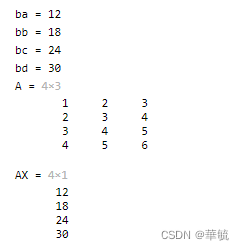
b为m1维列向量,A为m1×n维矩阵
Aeq与beq也是同理。
Matlab求解线性规划问题所要做的变换
在用Matlab求解线性问题标准型
1、MATLAB标准型是对目标函数 求极小,如果遇到是对目标函数求极大的问题,在使用MATLAB求解时,需要在函数前面加一个负号转化为对目标函数求极小的问题;
2、MATLAB标准型中的 不等式约束形式为“≤”,如果在线性规划问题中出现“≥”形式的不等式约束,则我们需要在两边乘以(-1)使其转化为MATLAB中的“≤”形式;
3、如果在线性规划问题中出现了“<”或者“>”的约束形式,则我们需要通过添加松弛变量使得不等式约束变为等式约束;
如果原有线性规划问题的约束条件为不等式,则可增加一个或减去一个非负变量,使约束条件变为等式,增加或减去的这个非负变量称为松弛变量。
4、之后,我们只需要将所有的约束(包括不等式约束和等式约束)转化为矩阵形式的即可。
Matlab求解线性规划
直接先来看一个简单的例子:
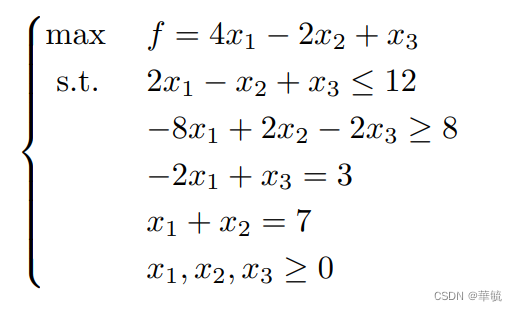
1、原问题为对目标函数求极大,故添加负号使变为:min f=-4x1+2x2-x3
2、原问题中存在“≥”的约束条件,故添加负号使其变为8x1-2x2+2x3≤-8
3、将约束整理为矩阵形式:
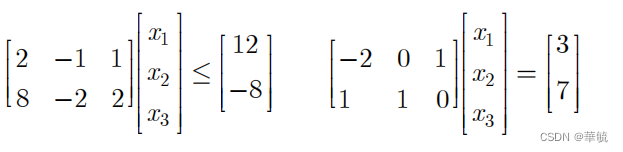
(将矩阵作以运算可以看出是:2x1-x2+x3≤12;8x1-2x2+2x3≤-8;-2x1+x3=3;x1+x2=3。也就是上面的等式约束和不等式约束)
用Matlab表达为:
f=[-4; 2; -1]; %将目标函数转化为求极小
A=[2 -1 1; 8 -2 2]; b=[12; -8]; %不等式约束系数矩阵
Aeq=[-2 0 1; 1 1 0];beq=[3; 7]; %等式约束系数矩阵
lb=[0; 0; 0];ub=[Inf; Inf; Inf] %对设计变量的边界约束,上界和下界
x=linprog(f,A,b,Aeq,beq,lb,ub)
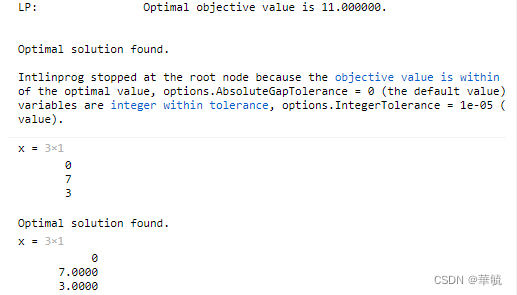
运行结果如下:
LP函数调用格式
MATLAB优化工具箱中求解线性规划问题的命令为linprog,其函数调用方法
有多种形式如下所示:
x = linprog(f,A,b) %目标函数和不等式约束
x = linprog(f,A,b,Aeq,beq) %目标函数、不等式约束和等式约束
x = linprog(f,A,b,Aeq,beq,lb,ub) %目标函数、不等式约束、等式约束和边界约束
x = linprog(f,A,b,Aeq,beq,lb,ub,x0) %目标函数、不等式约束、等式约束、边界约束和算法求解的初始点也就是迭代的初始点
x = linprog(c,A,b,Aeq,beq,lb,ub,x0,options) %目标函数、不等式约束、等式约束、边界约束和算法求解的初始点也就是迭代的初始点、options是求解时用户提供的控制参量
x = linprog(problem)
[x,fval] = linprog(...) %改变输出参数为两个,一个是x一个是f value,代表目标函数在x点处的目标函数值.
[x,fval,exitflag] = linprog(...) %输出参数有三个
[x,fval,exitflag,output] = linprog(...) %输出参数有四个
[x,fval,exitflag,output,lambda] = linprog(...) %输出参数有五个
LP的输入参数
MATLAB工具箱中的linprog函数在求解线性规划问题时,提供的参数为:模
型参数、初始解参数和算法控制参数。
模型参数:x、f、A、b、Aeq、beq、ub、lb。决策变量、目标函数、不等式约束、等式约束和边界约束
x0为线性规划问题的初始解,该设置仅在中型规模算法中有效,而在默认的大型规模算法和单纯形算法中,MATLAB将忽略一切初始解。
options为包含算法控制参数的结构变量,我们可以通过optimset命令对这些具体的控制参数进行设置,例如下述格式options = optimset(‘param1’,value1,‘param2’,value2,…)
该命令格式创建一组控制参数结构变量options,将参数的具体值赋给单引号之间的参数,任何未被指定的参数将被赋值为[],参数值为[]的具体的含义是将该组控制参数传递给优化函数时将使用MATLAB提供的默认值
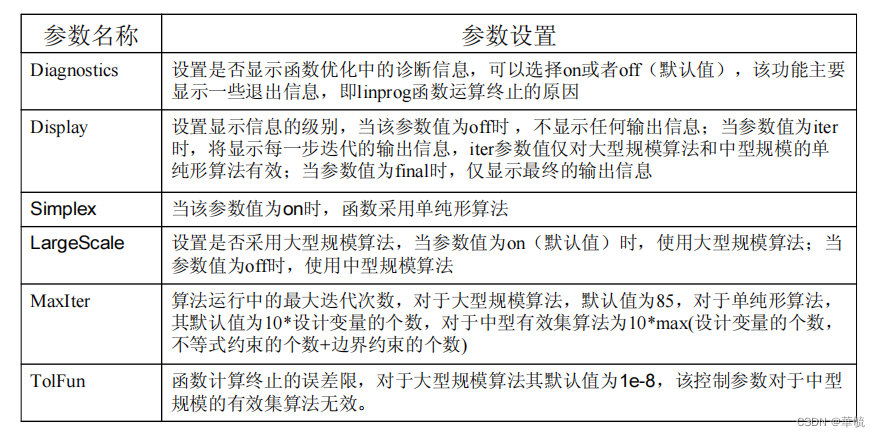
在线性规划问题中可以用到的设置参数如下表所示:
LP输入参数命令示例
1、x = linprog(f,A,b)
2、x = linprog(c,A,b,Aeq,beq)
即该函数调用格式解决的是既含有线性等式约束,又含有线性不等式约束的线性规划问
题,如果在线性规划问题中无线性不等式约束,则可以设A=[]以及b=[]
3、x = linprog(c,A,b,Aeq,beq,lb,ub)
即在线性规划问题的求解过程中进一步考虑了对设计变量的约束,其中lb和ub均是和设
计变量维数相同的列向量,如果对设计变量没有上界约束,可以设置ub(i) = Inf,如果
没有下界约束则可以设置lb(i) = -Inf,和(2)类似,如果问题中没有等式约束,则可以设
Aeq=[]以及beq=[]
4、x = linprog(c,A,b,Aeq,beq,lb,ub,x0)
在前面调用方法的基础上设置线性规划问题求解的初始解为x0,该参数仅在使用有效集
算法时生效,否则当使用默认的内点算法时,将忽略任何初始点,即参数无效。
5、 x = linprog(c,A,b,Aeq,beq,lb,ub,x0,options)
用options指定的优化参数进行最小化。可以使用optimset来设置这些参数
LP的输出参数
linprog函数返回的输出参数有x、fval、exitflag、lambda和output。
1、输出参数x为线性规划问题的最优解
2、输出参数fval为线性规划问题在最优解x处的函数值
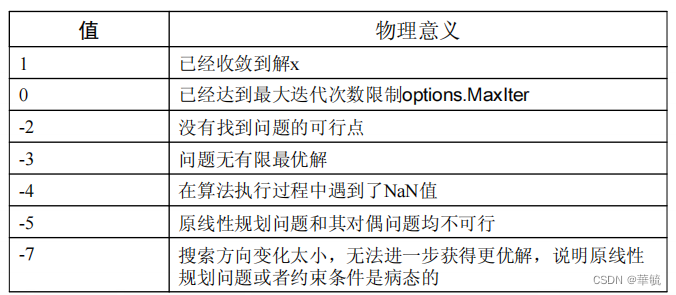
3、输出参数exitflag返回的是优化函数计算终止时的状态指示,说明算法终止的原因,其取值和其代表的具体原因如表所示:
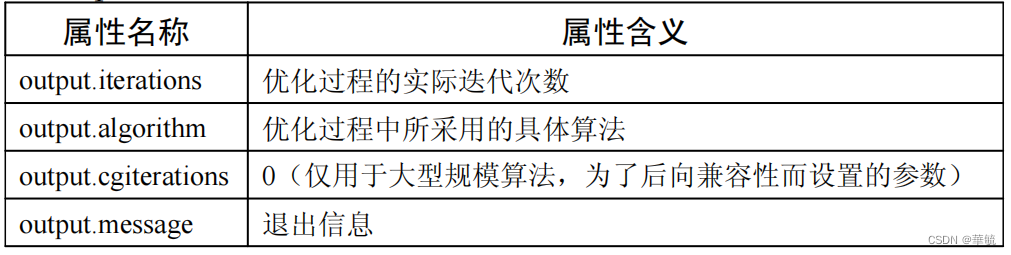
4、输出参数output是一个返回优化过程中相关信息的结构变量,其属性如表所示:
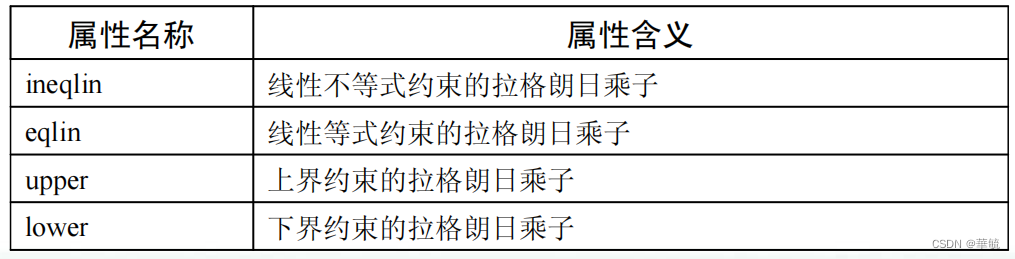
5、输出参数lambda是返回线性规划问题最优解x处的拉格朗日乘子的一个结构变量,其总维数等于约束条件的个数,其非零分量对应于起作用的约束条件,其属性如表所示:
LP的输出参数的调用
1、[x,fval] = linprog(…)
在优化计算结束之时返回线性规划问题在解x处的目标函数值fval
2、 [x,fval,exitflag] = linprog(…)
在优化计算结束之时返回exitflag值,描述函数计算的退出条件。
3、 [x,fval,exitflag,output] = linprog(…)
在优化计算结束之时返回返回结构变量output
4、 [x,fval,exitflag,output,lambda] = linprog(…)
在优化计算结束之时返回线性规划问题最优解x处的拉格朗日乘子lambda
用Matlab求解线性规划的例子
如:
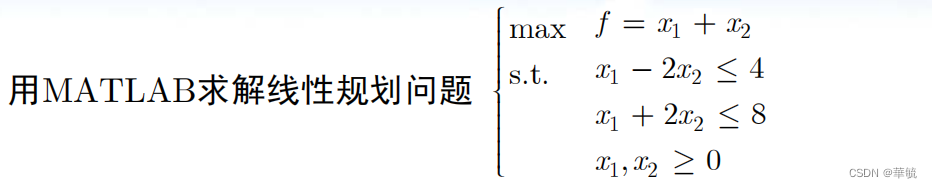
f=[-1;-1]; %目标函数,为转化为极小,故取目标函数中设计变量的相反数
A=[1 -2;1 2]; %线性不等式约束
b=[4;8];
lb=[0;0]; %设计变量的边界约束,由于无上界,故设置ub=[Inf;Inf];
ub=[Inf;Inf];
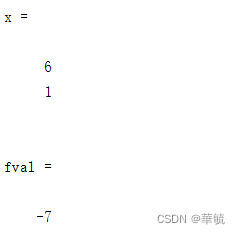
[x,fval]=linprog(f,A,b,[],[],lb,ub)
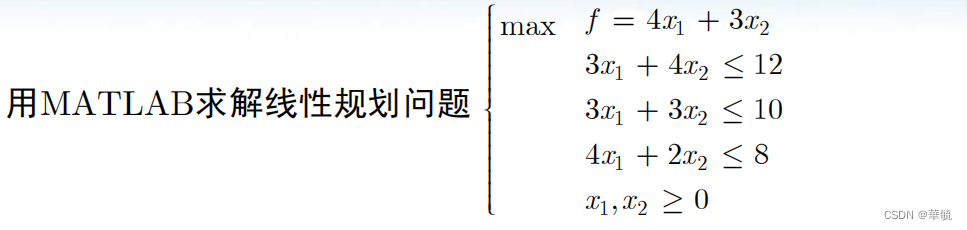
f=[-4;-3]; %目标函数,为转化为极小,故取目标函数中设计变量的相反数
A=[3 4;3 3;4 2]; %线性不等式约束
b=[12;10;8];
lb=[0;0]; %设计变量的边界约束,由于无上界,故设置ub=[Inf;Inf]
ub=[Inf;Inf];
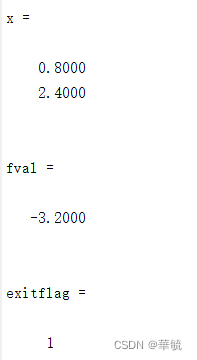
[x,fval,exitflag]=linprog(f,A,b,[],[],lb,ub) %输出最优解x,在最优解x处的目标函数值f value,函数运行终止的状态指示变量
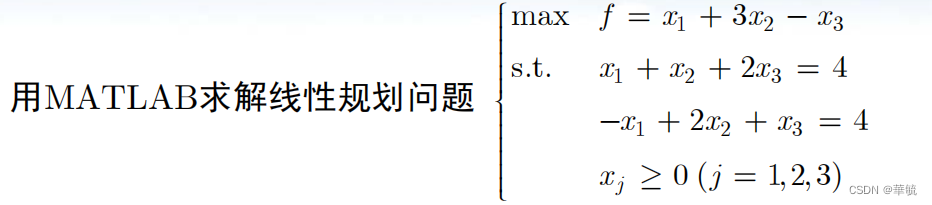
f=[-1;-3;1]; %目标函数,为转化为极小,故取目标函数中设计变量的相反数
Aeq=[1 1 2;-1 2 1]; %线性等式约束
beq=[4;4];
lb=[0;0;0]; %设计变量的边界约束,由于无上界,故设置ub=[Inf;Inf;Inf]
ub=[Inf;Inf;Inf];
[x,fval,exitflag,output]=linprog(f,[],[],Aeq,beq,lb,ub)%输出最优解x,在最优解x处的目标函数值f value,函数运行终止的状态指示变量,输出信息
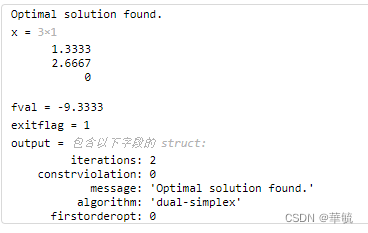
exitflag=1表示问题首先到了解x处
output里的参数 可以对照上面的表
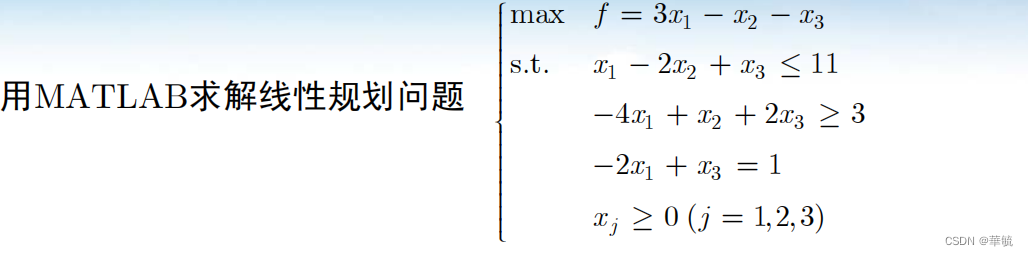
f=[-3;1;1]; %目标函数,为转化为极小,故取目标函数中设计变量的相反数
A=[1 -2 1;4 -1 -2]; %线性不等式约束
b=[11;-3];
Aeq=[-2 0 1]; %线性等式约束
beq=[1];
lb=[0;0;0]; %设计变量的边界约束,由于无上界,故设置ub=[Inf;Inf;Inf]
ub=[Inf;Inf;Inf];
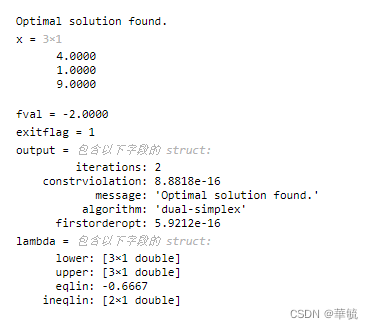
[x,fval,exitflag,output,lambda]=linprog(f,A,b,Aeq,beq,lb,ub) %输出最优解x,在最优解x处的目标函数值f value,函数运行终止的状态指示变量,输出信息,线性规划问题最优解x处的拉格朗日乘子的一个结构变量
注:整数问题或是0-1规划问题和线性规划问题都可用matlab自带的 “intprog” 工具箱来解决,是通用的。
最后
以上就是震动大门最近收集整理的关于线性规划(LP)问题的Matlab求解的全部内容,更多相关线性规划(LP)问题内容请搜索靠谱客的其他文章。








发表评论 取消回复