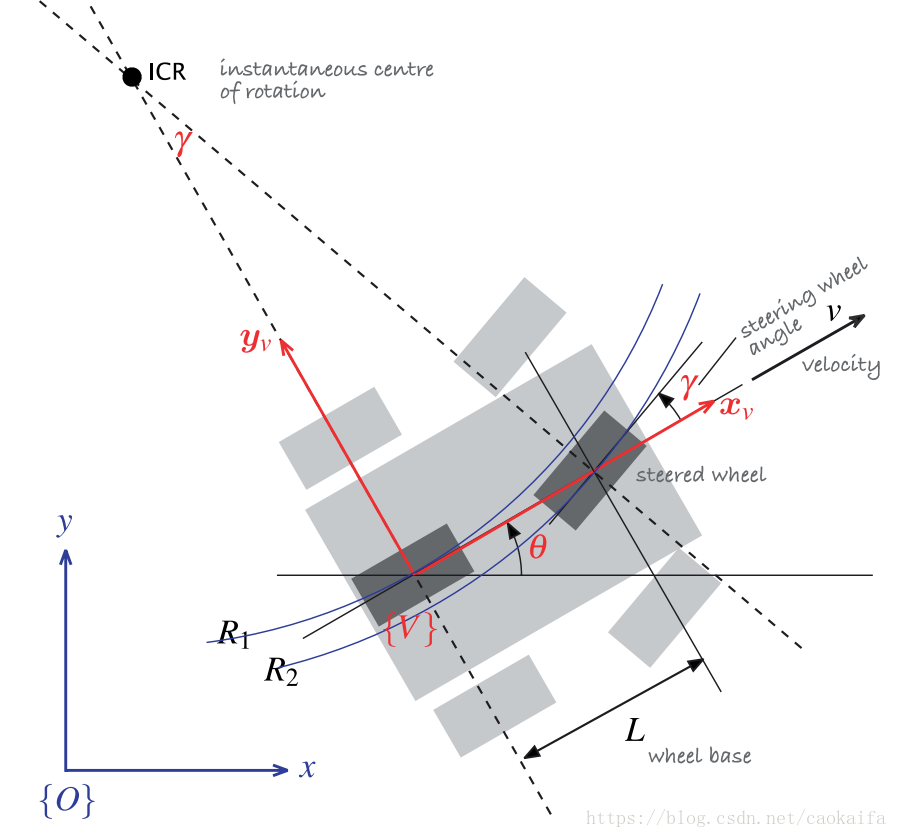
如上图汽车的自行车模型,上面轻灰色显示的是车,这个车坐标系是红色,这个世界坐标系是蓝色,轮子转向角是,两个轴扩展虚线然后相交于ICR。ICR到后轮和到前轮的距离分别为R1,R2。
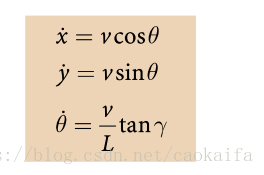
运动等式:
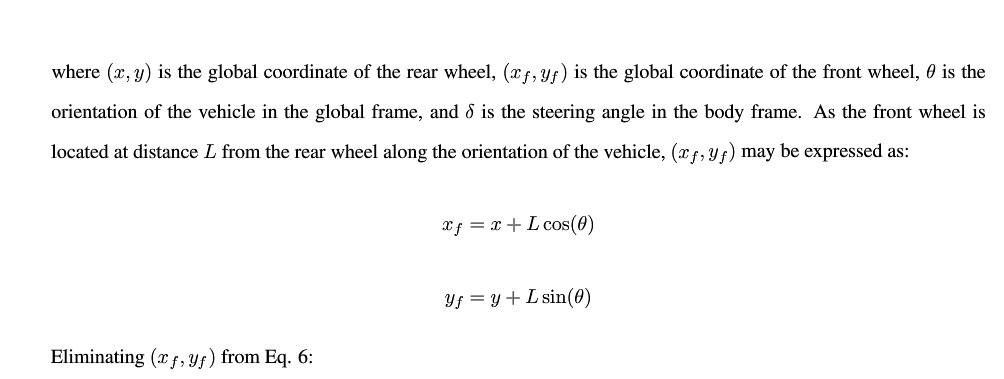
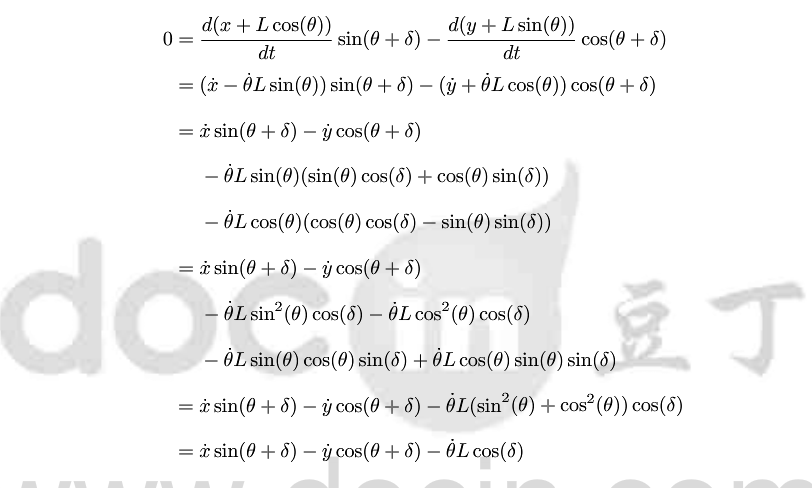
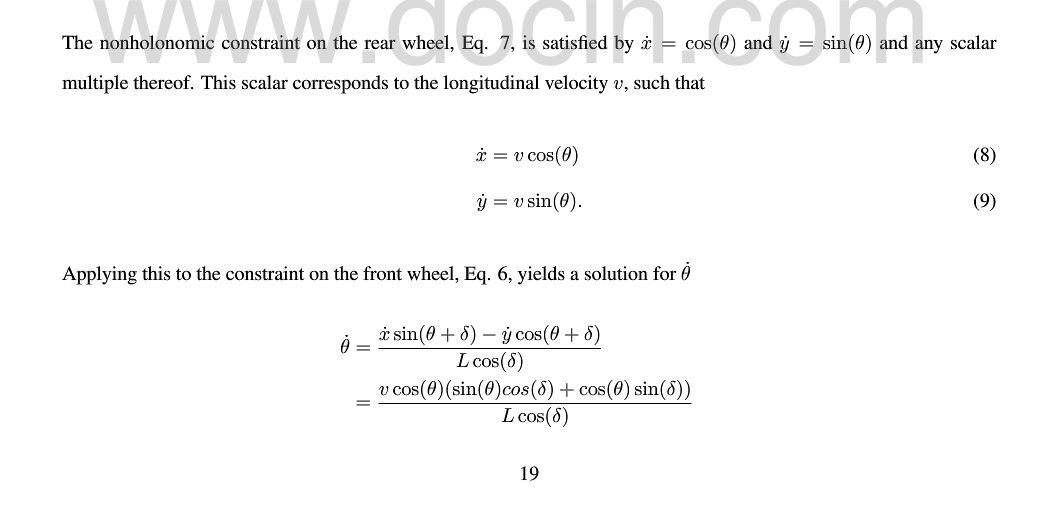
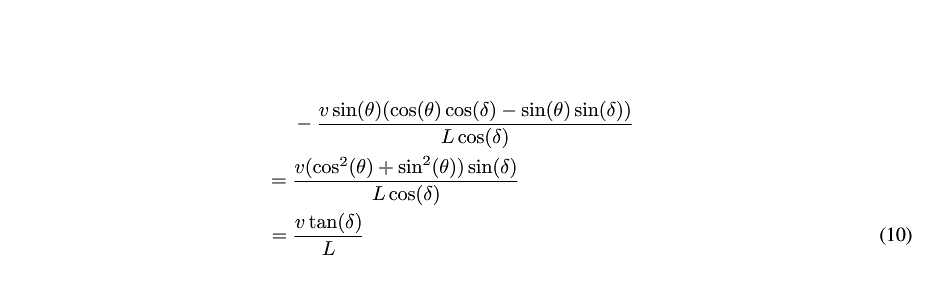
对于上面的公式车身角度增量与轮子转向的关系的推导:
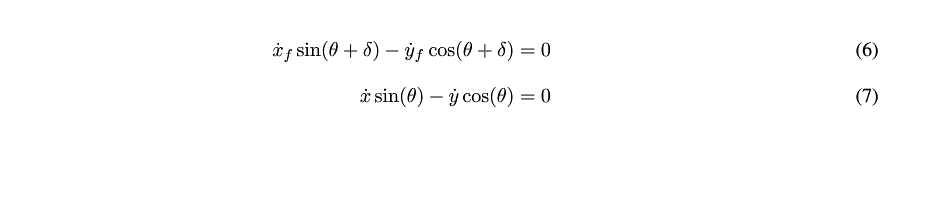
轮子的约束条件:
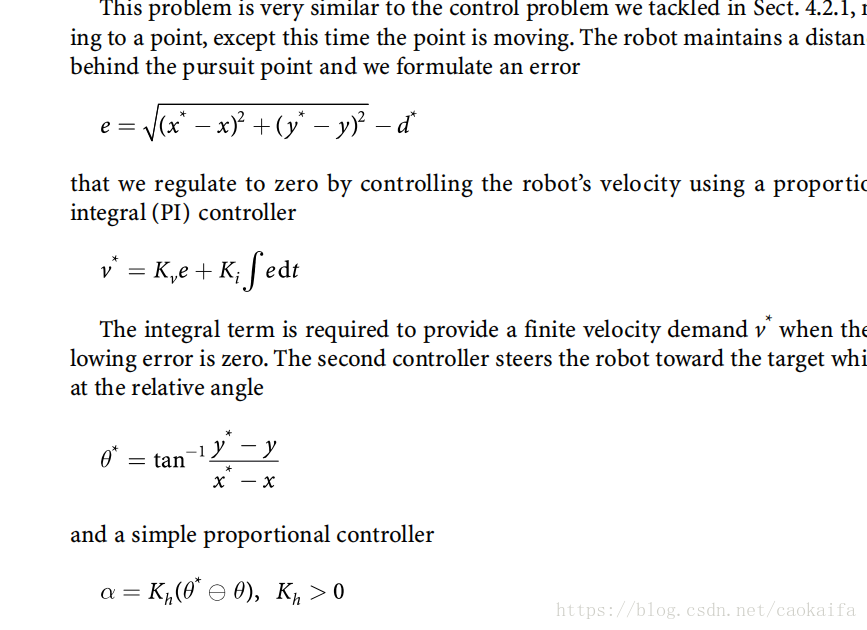
纯追踪算法对于路径跟随而言是简单和有效的方法,这里给出跟踪圆的路径,
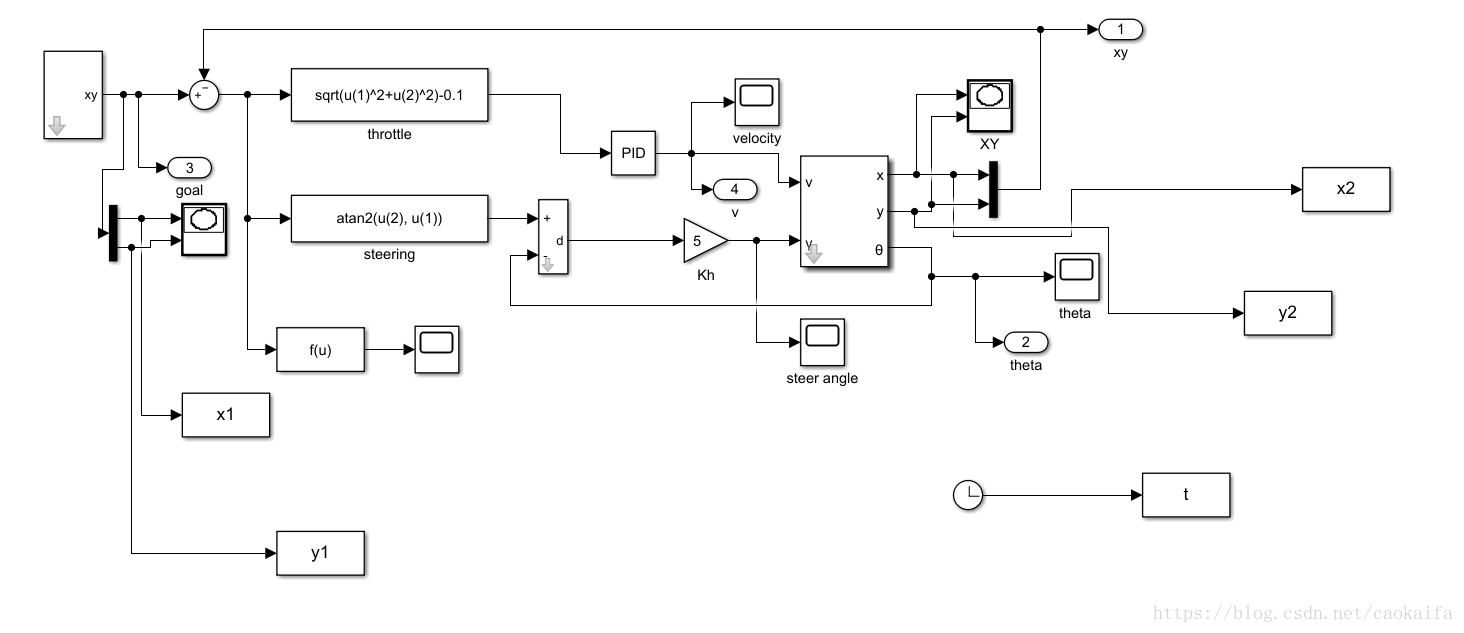
在matlab/simulink中搭建仿真模型:
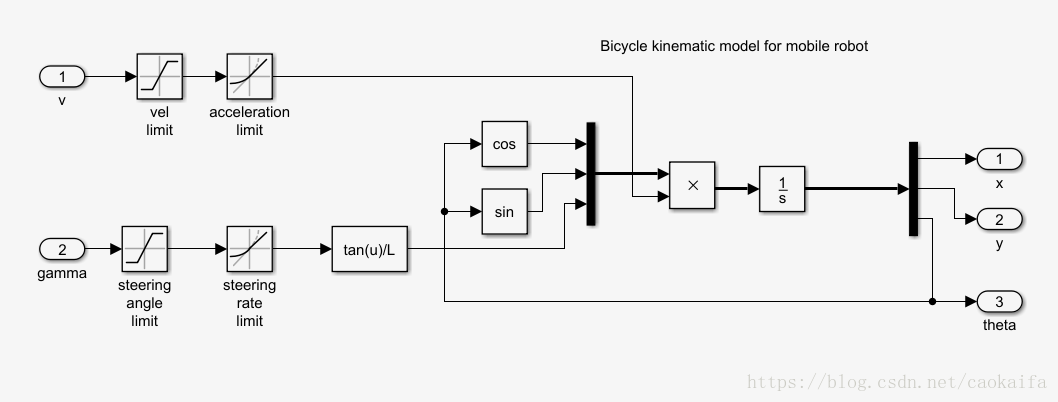
上面的自行车模型如下:
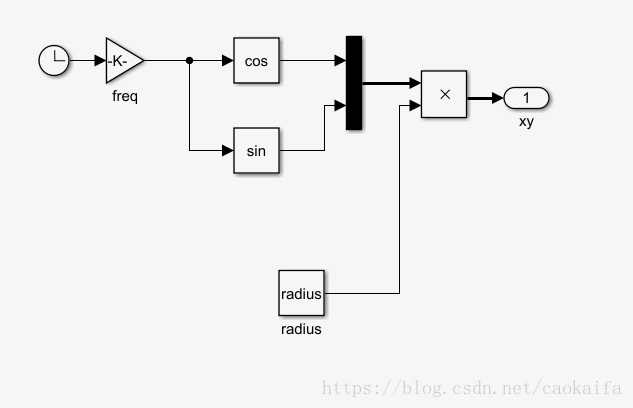
上面圆的路径如下:
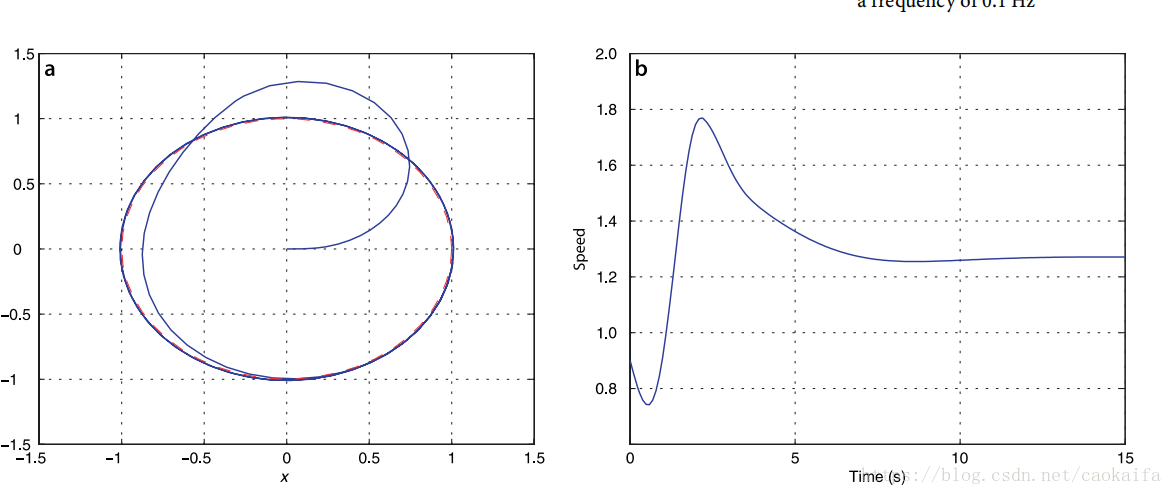
仿真图形如下:
控制角度也可以用曲率:
tf::Vector3 p1(path.poses.at(i).pose.position.x, path.poses.at(i).pose.position.y, 0.0);
tf::Vector3 p2(path.poses.at(max(0,i-1)).pose.position.x, path.poses.at(max(0,i-1)).pose.position.y, 0.0);
pos_sp_ = tf_.inverse() * ((p1 + p2) / 2.0);
float curvature = 2*abs(pos_sp_.getY())/(LOOK_AHEAD_DIST * LOOK_AHEAD_DIST);
// float ang_diff=atan((path.poses.at(i).pose.position.y-path.poses.at(max(0,i-1)).pose.position.y)/(path.poses.at(i).pose.position.x-path.poses.at(max(0,i-1)).pose.position.x));
// publish drive cmds
float steering_cmd = P_GAIN * curvature;
// float steering_cmd = 0.15* (ang_diff- car_pose_.position.z);
if (pos_sp_.getY()<0){steering_cmd *= -1.0;}
外国电子书籍下载地址:
http://b-ok.org/
最后
以上就是自觉书本最近收集整理的关于手把手教用matlab做无人驾驶(四)-pure pursuit的全部内容,更多相关手把手教用matlab做无人驾驶(四)-pure内容请搜索靠谱客的其他文章。








发表评论 取消回复