1.算法思想
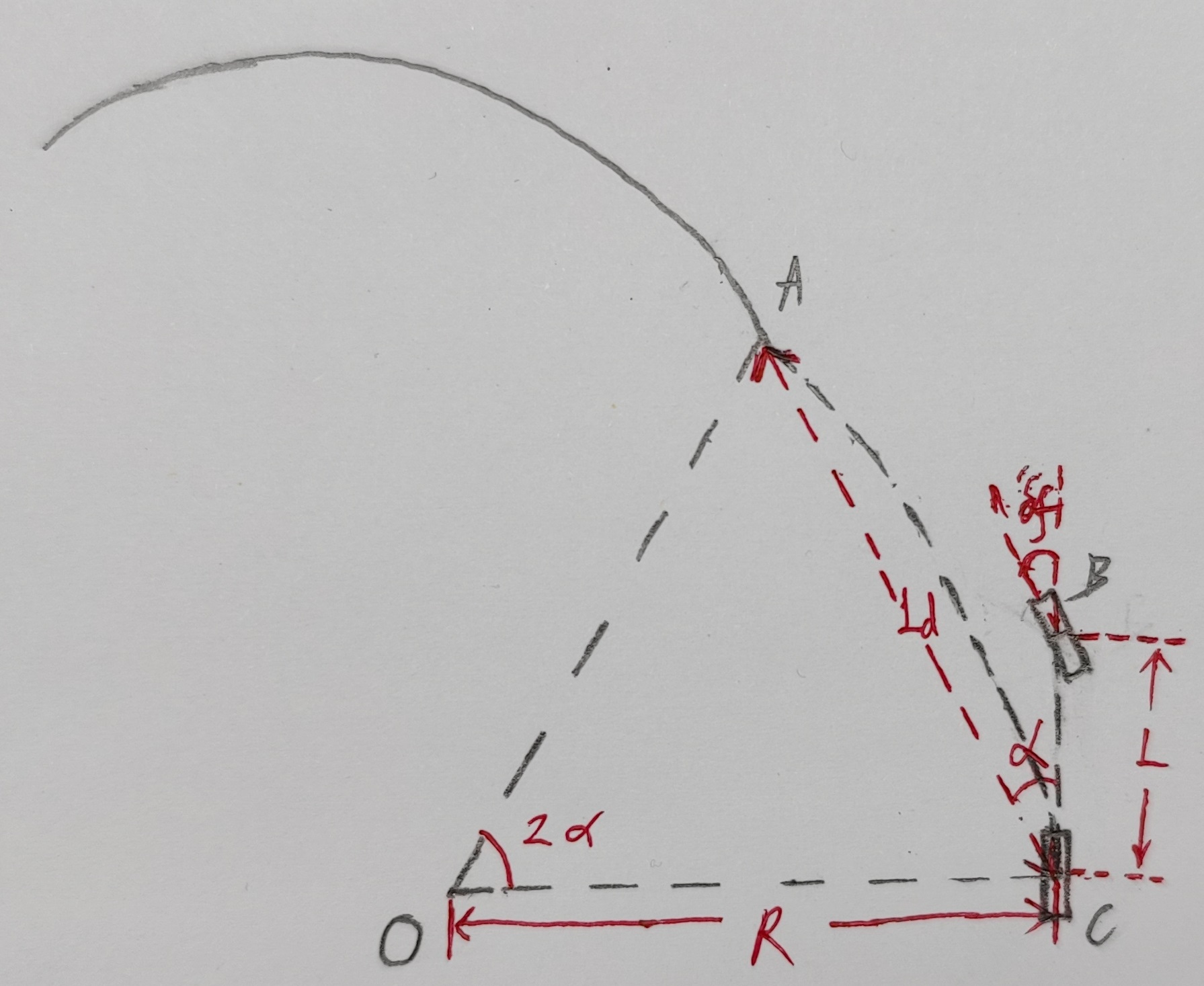
借鉴人类驾驶习惯,在参考轨迹上选取离车辆当前位置一定距离的点作为预瞄点,调整方向盘转角(前轮转角),车辆(后轮中心)沿圆轨迹驶向预瞄点。
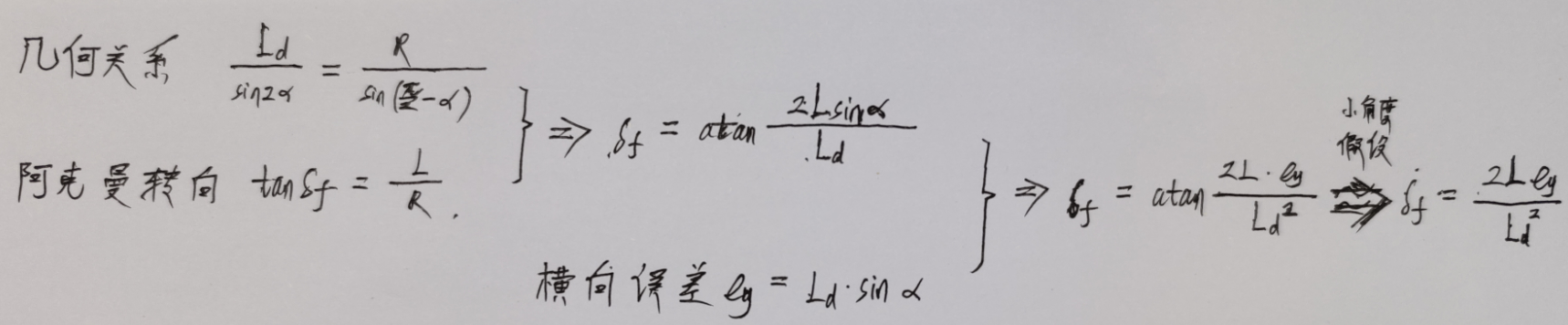
2.算法原理
3.算法调参
![]()
4.个人理解
纯跟踪算法为车辆后轴中心相对于预瞄点的横向位置误差比例控制器,其缺陷有二:
1.预瞄点位置靠前于车辆位置,其横向误差为零不能保证车辆位置横向误差为零;
2.比例控制器决定了控制品质上限不高。
5.算法实现
...
6.视频分享
...
7.相关论文
https://www.ri.cmu.edu/pub_files/pub3/coulter_r_craig_1992_1/coulter_r_craig_1992_1.pdf
最后
以上就是俊秀薯片最近收集整理的关于【运动控制】纯跟踪算法1.算法思想2.算法原理3.算法调参4.个人理解5.算法实现6.视频分享7.相关论文的全部内容,更多相关【运动控制】纯跟踪算法1内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复