原标题:
基于高耦合逆变补偿的水利工程电气控制系统设计
摘 要:
嵌入式Linux内核环境下进行电气的控制系统优化设计,可以提高电气的集成控制性能,针对当前的电气控制系统耦合控制能力不佳的问题,提出并设计一种基于鲁棒性变结构PID和高耦合逆变补偿的电气控制系统。首先进行了电气控制系统总体设计构架和功能模块描述,采用低功耗的STM32F101xx作为核心控制芯片进行控制系统的硬件设计,包括AD模块、驱动模块、执行器模块和高压调节模块等。对电气控制系统的功能指标进行分析,采用鲁棒性变结构PID控制算法进行电气控制系统的高耦合逆变补偿,在程序加载模块进行控制算法加载,完成基于高耦合逆变补偿的水利工程电气控制系统设计。系统调试结果表明,该系统具有较好的电气智能化控制性能,对基线漂移和高压过载等失真的补偿性较好,负载能力得到提高。相较于传统系统,该系统的控制精度较高,最高控制误差不超过40%,且控制耗时较低。
关键词:
嵌入式Linux内核; PID; 电气控制; 系统设计; 水利工程; 水电站;
作者简介:
俞娟(1978—),女,实验师,硕士,主要从事电气工程与自动化专业的教学与实践指导研究。
E-mail:yujuanyj@aliyun.com;
基金:
国家自然科学基金项目(61472429,U1836209)
引用:
俞娟 . 基于高耦合逆变补偿的水利工程电气控制系统设计[J]. 水利水电技术,2020,51( 7) : 70-76.
YU Juan. High coupling inverting compensation-based design of electric control system for water conservancy project[J]. Water Resources and Hydropower Engineering,2020,51( 7) : 70-76.
0 引 言
电气控制系统涉及领域较多,相关技术有计算机技术、网络智能技术等,在电气控制系统中对成熟技术的应用使得水利工程领域的电气控制系统实际应用效果得到了很大提高,为水利水电工程自动化的实现提供了有力的保障。将电气自动化技术有效地应用于水利水电工程中,不仅能更好地利用资源,还能使工程效率得到提高,进而提高水电工程管理的便捷性。智能技术可以控制复杂、多变的对象模型,大大减少了不可控因素对对象模型的影响,提高了自动化系统的精度。因此,为更好地推进现代化建设,有必要大力推广电气自动化技术的应用。集成电气自动化控制系统是保障电气自动化稳定性运行的关键,通过电气控制提高电气设备的输出稳定性和功率增益。随着电气自动化技术的发展,采用集成DSP芯片和低功耗的控制集成软件进行电气控制系统设计,测量、记录、分析电气设备运行的相关参数,通过参数自整定性分析,能有效对功率损耗、电机的谐波振动、漏磁等损耗进行二次规划和优化设计,研究电气控制系统的优化设计方法,能实现电机和电气设备之间的全局优化耦合控制,抑制输出失真,提高误差补偿能力,相关的控制系统设计方法研究在电气自动化系统设计中同样具有积极重要的意义。
目前,电气控制系统的设计取得了一定的研究成果。文献将电气控制应用到了水利灌溉自动监控系统中,该系统由电气监控中心和视频监控模块以及电气信息管理模块组成,系统能够实现田间智能灌溉,电气监控中心对无线数据传输进行监测,并引入数据采集、数据流量控制以及泵站安防等技术,实现自动灌溉系统的电气控制。该系统改善了水利工程领域电气控制应用复杂度较高的问题,但是实际应用中发现该系统的误差补偿能力较弱,容易导致较大的监控误差。文献设计一种基于87C196KC单片机的大型水电站电压电气节能控制系统。硬件部分由87C196KC单片机、多相电压检测电路、功放电路等组成。通过A/D转换器与D/A转换器对大型水电站电压信号进行转换;系统的软件部分利用模糊控制算法实现。该系统控制误差较小,但是存在算法加载过程耗时较长问题。文献提出基于滑模的永磁同步电机自抗扰控制系统。依据对伺服系统的数学模型分析结果,对电气控制系统参数变化引起随机扰动进行监测并补偿,此时系统可看做是积分器串联型,滑模状态反馈使闭环伺服系统实现快速控制。该电气控制系统的电机自抗扰控制效果较好,但是存在系统功能指标不明确问题,导致该系统工作效率较低。由于当前方法没有通过鲁棒性变结构PID控制算法,完成电气控制系统的高耦合逆变补偿,导致水利工程电气控制系统出现控制效果较差的问题,为了解决当前方法存在的问题,实现高效率、高准确度的电气设备控制,引入高耦合逆变补偿方法以更好地实现电气系统控制,提出基于高耦合逆变补偿的水利工程电气控制系统设计方法。具体步骤如下:
(1)简单描述了水电工程电气控制系统对社会经济发展的重要作用,并介绍了传统控制方法,存在耗时长、精度差等问题。
(2)通过核心控制芯片设计控制系统的硬件部分,包括AD模块、驱动模块、执行器模块和高压调节模块等,实现电气控制系统总体设计构架和功能模块的整体描述。
(3)引入鲁棒性变结构PID控制算法,完成电气控制系统的高耦合逆变补偿,分析电气控制系统的功能指标,在程序加载模块进行控制算法加载,实现基于高耦合逆变补偿的水利工程电气控制系统设计。
(4)试验与讨论,在电气控制的输出性能、不同负载下的电气控制参量、控制误差对比和控制耗时对比四个方面,验证本文系统的整体有效性。
1 电气控制系统总体设计构架
首先分析电气集成智能控制系统总体设计并进行功能模块分析和介绍,电气控制系统建立在通用计算机控制平台基础上,同样可以采用嵌入式控制平台,实现系统的兼容设计,通过AD采样电路对采集的电气机电信息参数进行自整定性处理,设计控制器进行集成智能控制,采用传感器进行控制中心单元的工况信息,采用继电器作为执行控制单元输出到DSP智能处理芯片中进行控制信息处理。在电气控制系统设计中,选择了ADI公司的ADSP-BF537进行电气控制信息处理,在控制执行单元,由输出控制陀螺仪进行电磁干扰和电机温升等参量的稳态控制和误差补偿,基于高耦合逆变补偿方法,减少电气控制中的谐波,防止磁饱和,根据上述电气控制系统的总体设计原理,得到电气控制系统的设计结构如图1所示。
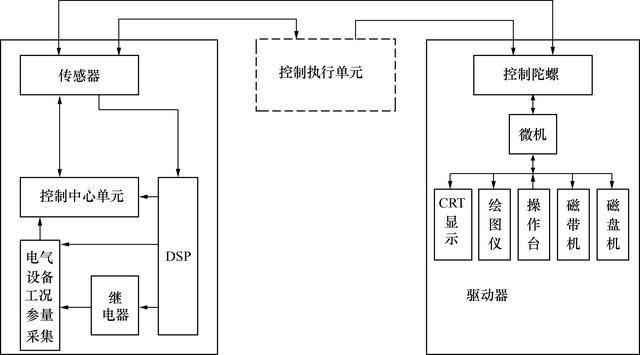
图1 电气控制系统的设计结构框图
根据图1所示的电气控制系统的设计结构框图,建立几何参数和控制目标函数,进行控制系统优化设计。
2 水利工程电气控制
2.1 电气控制系统的功能指标分析
根据上述对电气控制系统总体设计描述,结合设计的需求和外围器件的参数性能,进行电气控制系统的功能指标分析,系统选用ADI公司的A/D和D/A完成24通道的控制信息采集的多通道数据记录,采用低功耗的STM32F101xx作为核心控制系统进行控制系统的硬件设计。根据上述设计原理,得到电气控制系统设计的技术指标描述如下。
(1)电气控制系统的信息采集通道采用低电压复位实现程序动态加载,加载的信息分贝数为:-20 dB~+30 dB,为了增强系统的抗干扰性,设计的指令周期为DMA0。
(2)在1.6 s内看门狗输入端RTC设定为11,DMA控制器具有低电池检测功能,实现多线程的异步输入。
(3)PFI管脚电压低于1.25 V,控制信息采样率≥1 200 kHz。
(4)DSP程序采用16位打包模式,在1.6 s内A/D分辨率:10位(至少)。
(5)周期的保持时间从地址0x20000000执行,控制系统的电源供电为220 V电源,SPI存储器的动态电流低于2 μA,通过串行的TWI存储器数据加载到DSP中。
(6)引导ROM开始执行MXI总线控制,D/A转换速率≥200 kHz。
根据上述功能模块分析和控制系统的技术指标描述,进行电气控制系统的集成开发与设计。
2.2 控制算法设计
在上述进行了电气控制系统的总体设计描述和功能技术指标分析的基础上,进行控制器的控制律设计,控制器设计的核心在于控制算法,针对当前的控制系统耦合控制能力不好的问题,提出一种基于鲁棒性变结构PID和高耦合逆变补偿的电气控制系统设计方法,鲁棒性变结构PID神经网络的结构模型如图2所示。
选定电气控制系统的永磁体体积、绕组等参量作为变结构PID神经网络的输入训练矢量集x(t)=(x0(t),x1(t),…,xk-1(t))T;其中k为永磁体磁场下的PID训练矢量个数,电气控制通道个数N,电机导体在磁场中的永磁绕组密度和铁芯密度为ρm、ρw,令控制向量x(t),t=0,1,…,n-1,进行鲁棒性变结构PID神经网络训练,在输入层,设定导体在磁场B中运动的初始采样时间值t=0,得到电气控制系统的PID三通道输入模型表述为
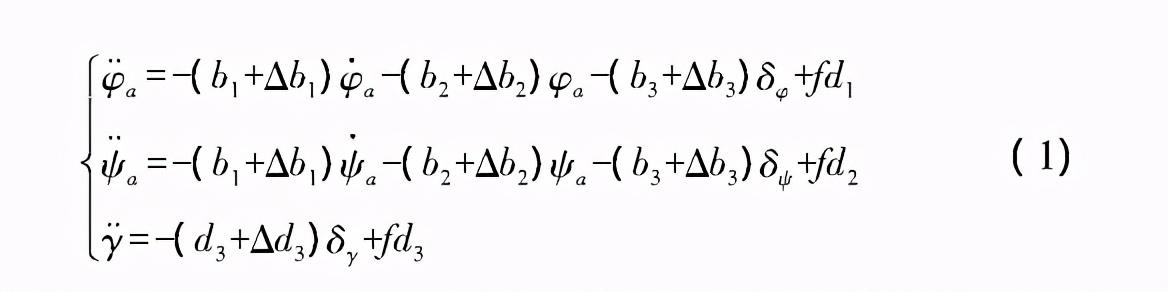
式中,φa、ψa、γ为电气控制输入变量,分别为线圈截面积、线圈跨度系数和绕组电阻;φ˙aφ˙a、ψ˙aψ˙a、γ˙γ˙为电气控制的多模决策变量;φ¨aφ¨a、ψ¨aψ¨a、γ¨γ¨为电气的机电系统输入功率;b1、b2、b3、d3为控制端电压的已知系数;Δb1、Δb2、Δb3、Δd3为线圈跨度系数的输出增益;fd1、fd2、fd3为整距绕组的干扰参量;δφ、δψ、δγ为静态神经元控制输入。采绕组产生的电损耗进行自整定性抑制,对控制目标函数进一步整理可得到
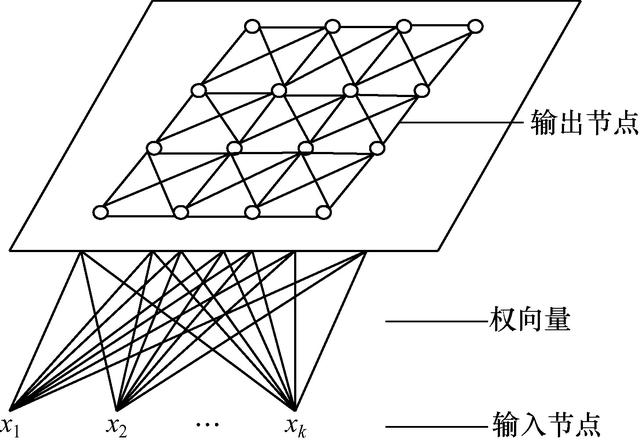
图2 鲁棒性变结构PID神经网络的结构模型
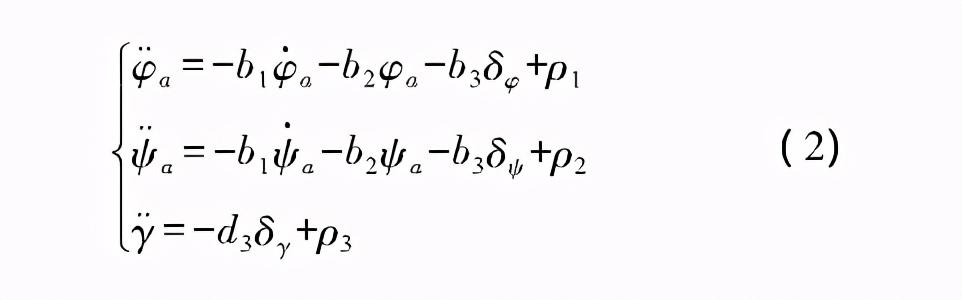
考虑到漏磁系数的影响,对输入鲁棒性变结构PID神经网络设定频率响应计数,采用自适应模糊加权,得到定/转子铁芯的加权向量模式x(t)=(x0(t),x1(t),…,xk-1(t))T,设置智能传感电机的确定性参量描述为(N,M),考虑电气控制系统的模糊约束参量,得到电气的控制输出误差为
式中,M−1nn-1为智能传感电机传输电量;u为传感向量;hn(φa,φ˙a)hn(φa,φ˙a)为误差函数;φ¨adφ¨ad为电气控制总量。
通过Routh稳定判据对电气控制系统进行自适应训练,训练完所有的L个训练矢量,得到电气控制的模糊自适应补偿状态函数为

式中,GC(s)为原始电气数据;G0(s)为训练后的电气数据;e-τs为自适应系数;Gm(s)为电气控制趋势函数。
调整与输出节点Nj*的自适应加权,得到控制参量的输入模型为

式中,p(ai)为被控对象的控制误差,0≤p(ai)≤1(i=0,1,2,…,m)。
进而得到控制器的闭环系统为

基于自适应能量均衡进行电机的电流振荡抑制和高耦合逆变补偿,定义d(t)=d1(t)+d2(t),被控对象的开环频率特征量取
则PID控制的传递函数选为

式中,c为传递系数。
通过基线漂移抑制进行逆变误差补偿,进而实现电气控制系统的优化控制,定义Lyapunov函数为
式中,T为转置符号。
对Lyapunove函数求导,得到
在上界已知的情况下,几圈电气控制系统的惯性阶段的增益,得到控制误差估计值ρ¯ˆ(x,ω)ρ¯^(x,ω),则有

根据Lyapunove稳定性原理得知,本文设计的鲁棒性变结构PID和高耦合逆变补偿控制算法是稳定收敛的。
3 控制系统的硬件设计与实现
在上述进行了电气控制系统的算法描述的基础上,进行系统设计,主要进行系统的硬件模块设计,系统的模块化设计包括AD模块、驱动模块、执行器模块和高压调节模块等。
3.1 AD模块
AD模块实现电气控制系统的AD采样和信息输入,采用STM32F101xx芯片作为AD模块的核心控制芯片,AD的最大时钟频率设置为45 kHz,具有半双工的双向端口形式,采用ST超低功耗 ARM CortexTM-M0微控制器为电气控制系统的Linux内核,电气控制系统的AD模块电路设计如图3所示。
3.2 驱动模块
驱动模块是电气控制系统的核心模块,采用PXI总线内部总线技术实现16个复用引脚的电气设备驱动。驱动模块的触发方式分为内触发和外触发两种,采用通用的PPI模式进行延时计数,设置完DMA参数后进行程序驱动程序接口设计,得到电气控制系统驱动模块的接口电路如图4所示。
3.3 执行器模块
执行器模块在有外部FIFO的情况下实现电气控制系统的65 MHz的电机控制和执行,采用ADG3301设计开关电平和控制式中,采用低功耗的STM32F101xx作为核心控制芯片,实现执行器模块的硬件设计。高压调节模块实现电气控制系统的高压调节功能,使用ADM706S精确监控3.3 V电压进行高压调节。
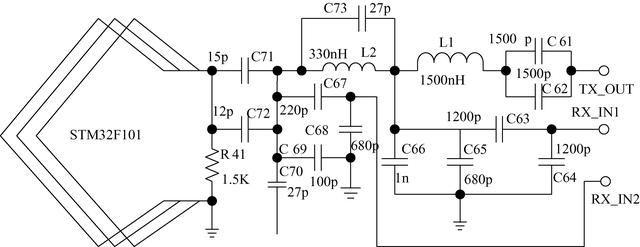
图3 电气控制系统的AD模块电路设计
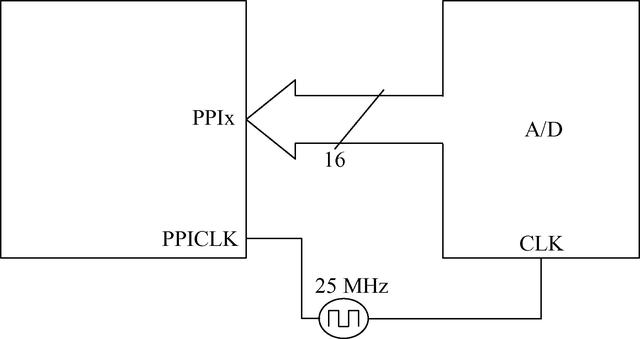
图4 驱动模块的接口设计
最后使用WorkBench电路仿真软件进行电气控制系统的集成电路设计,得到设计硬件集成设计如图5所示。
4 试验测试分析
为了测试本文设计的基于鲁棒性变结构PID和高耦合逆变补偿的电气控制系统的应用性能,进行仿真试验。试验地点为江苏省南京市高淳县的某重点水利工程项目基地。在该水利工程的电气控制中心,构建电气控制系统的Linux内核,通过程序加载模块进行控制算法的程序加载,编写CMD命令文件进行程序编译和控制算法加载,系统PCI总线与5409A数据总线连接,通过S3C2440内部A/D转换设备进行电气控制过程中的特征波形显示和信息输出,A/D采样频率25 MHz,线圈距离120 mm,电机输出电压24 V。以下试验测试过程均以上述初始参数设置为试验条件,根据上述仿真环境设定,进行系统调试,得到采用本文控制系统进行电气控制的输出电压和电流波形如图6所示。
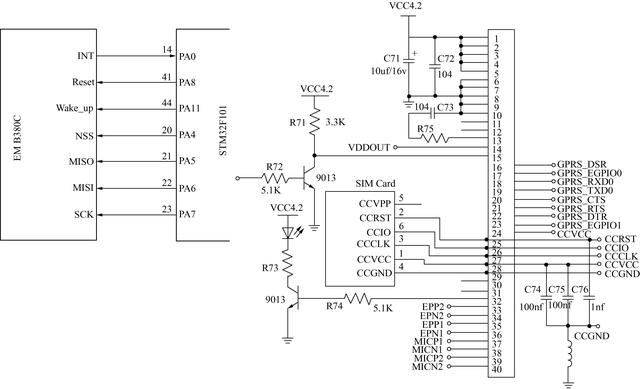
图5 电气控制系统的集成设计
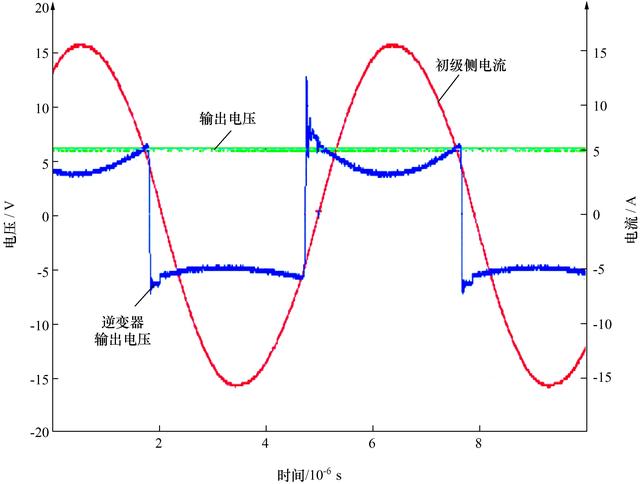
图6 电气控制的输出性能分析
图6得知,本文系统下输出电压和电流波动得到了明显改善,说明系统对电气控制过程的高压过载和电流基线漂移等失真的补偿性能较好。
在初始试验条件约束下,为进一步充分验证本文控制系统的有效性,选取控制输出误差为试验对比测试指标,保持试验条件的一致性,根据式(3)计算方式,将本文控制系统与文献[6]系统和文献[7]系统进行对比,结果如表1所列。
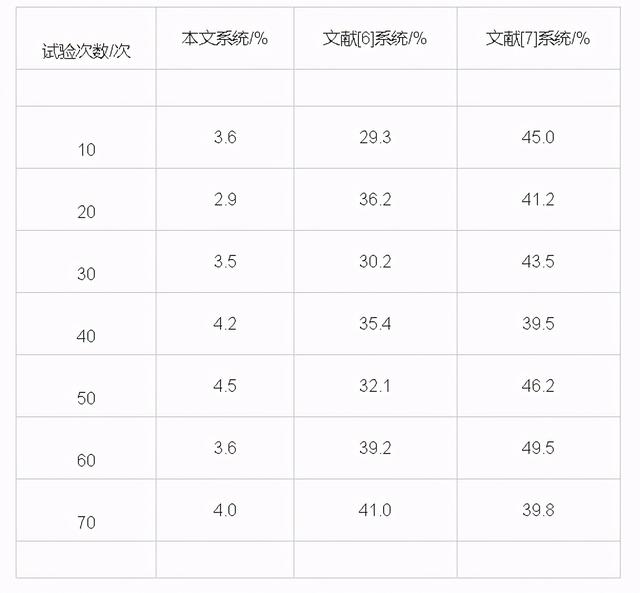
表1 控制误差对比结果
根据表1分析结果可以看出,本文控制系统的精度较高,在70次的试验测试过程中,本文系统的最高控制误差不超过4.0%,文献[6]系统的控制误差高达41.0%,文献[7]系统的控制误差高达39.8%,两种文献系统的误差均远远高于本文系统,由此可以看出,本文的电气控制系统具有较高的控制性能,能够高精度完成水利工程电气控制。
设定70次试验,每次试验条件相同,利用本文系统与文献[6]和文献[7]系统进行电气控制,耗时结果记录如下。
根据表2分析结果可以看出,相较于传统控制系统,本文控制系统的耗时较低,不超过6.8 s,而文献[6]系统和文献[7]系统的控制耗时相对较高,高于40%,远远高于本文系统。究其原因,是因为本文系统设计过程中,硬件部分将驱动模块作为核心,使用16个复用引脚的电气设备驱动,采用通用的PPI模式进行延时计数,对控制耗时进行了定量分析,由此完成了程序驱动接口设计,大大降低了控制系统耗时。
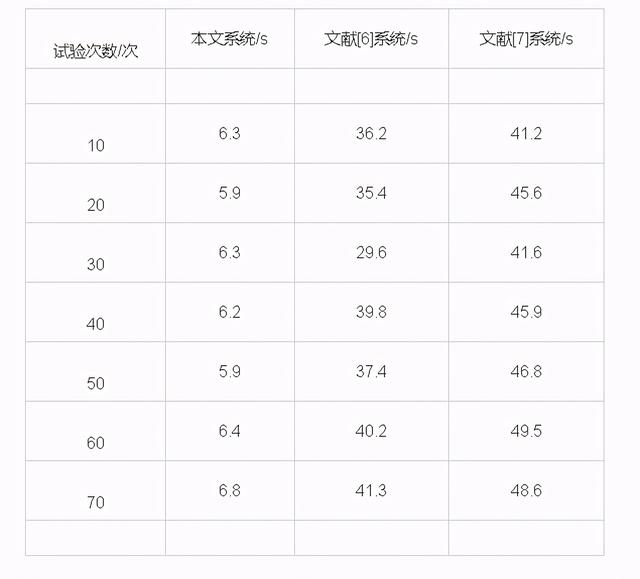
表2 控制耗时对比结果
5 结 论
电气自动化控制系统能够保证设备运行的可靠性与安全性,满足水利工程智能化发展的需求,促进社会经济的进步。本文针对当前水利工程电气控制系统存在系统耦合控制能力较差的问题,提出基于鲁棒性变结构PID和高耦合逆变补偿的电气控制系统设计方法。
(1)采用鲁棒性变结构PID控制算法进行电气控制系统的高耦合逆变补偿,进行系统的硬件模块化设计,包括AD模块、驱动模块、执行器模块和高压调节模块等,在程序加载模块进行控制算法加载,实现基于高耦合逆变补偿的水利工程电气控制系统设计。
(2)设计系统对基线漂移和高压过载等失真的补偿性较好,对输出参量的控制性能较好,同时最高控制误差不超过4.0%,控制系统耗时低于6.8 s,证明本文系统具有更好的输出增益和负载能力,系统准确性和控制效率更高。
然而,本文研究仍旧存在一定的不足,对输出参量的类型、数量等具体信息的描述不足,在以后的研究中,需要逐步细化电气输出参量问题,进行进一步的处理,为电气深入控制研究提供更好的数据基础,提高控制的全面性,进而促进水利工程电气工程的顺利实施。
水利水电技术
水利部《水利水电技术》杂志是中国水利水电行业的综合性技术期刊(月刊),为全国中文核心期刊,面向国内外公开发行。本刊以介绍我国水资源的开发、利用、治理、配置、节约和保护,以及水利水电工程的勘测、设计、施工、运行管理和科学研究等方面的技术经验为主,同时也报道国外的先进技术。期刊主要栏目有:水文水资源、水工建筑、工程施工、工程基础、水力学、机电技术、泥沙研究、水环境与水生态、运行管理、试验研究、工程地质、金属结构、水利经济、水利规划、防汛抗旱、建设管理、新能源、城市水利、农村水利、水土保持、水库移民、水利现代化、国际水利等。

最后
以上就是无限枕头最近收集整理的关于滑模控制原理_嵌入式Linux内核环境下的水利工程电气控制系统设计0 引 言1 电气控制系统总体设计构架2 水利工程电气控制3 控制系统的硬件设计与实现4 试验测试分析5 结 论的全部内容,更多相关滑模控制原理_嵌入式Linux内核环境下的水利工程电气控制系统设计0内容请搜索靠谱客的其他文章。








发表评论 取消回复