- Soc:RK3288
- Platform:Android 5.1
AL3220
AL3220B有四个RANGE:
| Range | TYP | 时间 |
|---|---|---|
| Range 1 | 33.28k | 6.53ms |
| Range 2 | 8,32k | 7.53ms |
| Range 3 | 2.08k | 11.53ms |
| Range 4 | 0.65k | 22.5ms |
这四个range有不同的分辨率模式,每个range需要的conversion时间不同,总的ALS conversion时间如下:
Conversion time = RANGE time * Mean time + ALS Waiting * 2注意:最开始调试光感时app获取到的光感总是不稳定,忽高忽低的,原因就是sensor 各个寄存器没有设置好。驱动调试时务必要认真阅读chip spec。
状态图
下面是AL3220状态图:
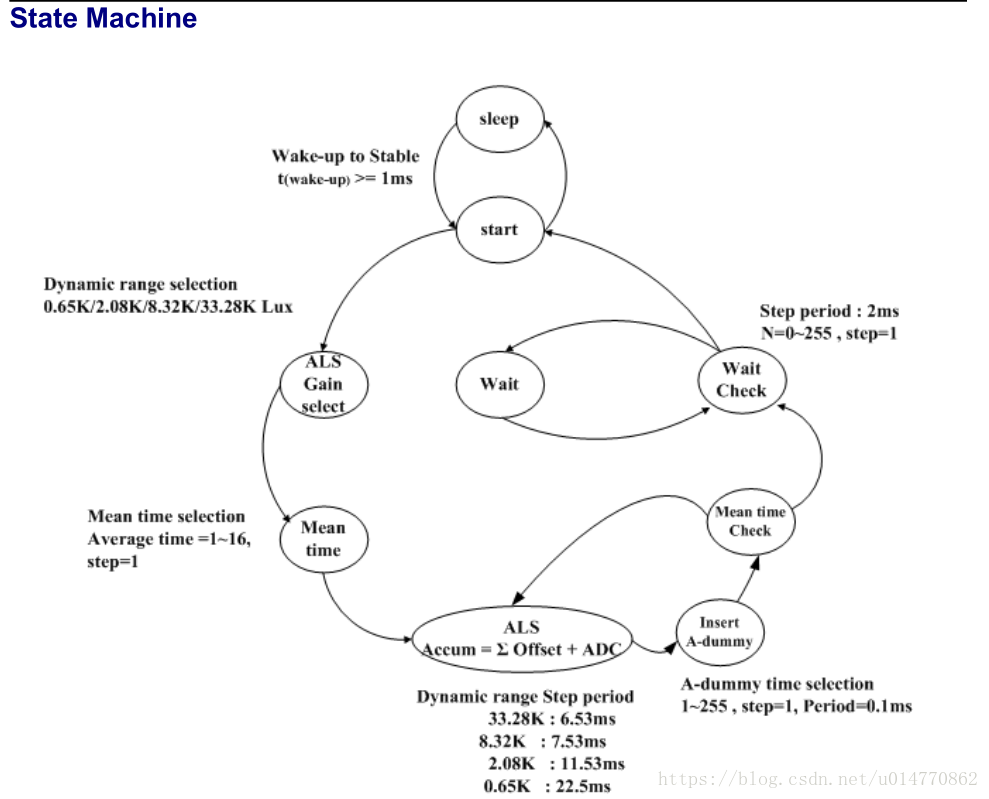
例如,选择精度分辨率为RANGE 3,即2.08k时,各个寄存器需要如下设置:
Mean time=16, Range3 (2.08K), A-dummy=18, ALS Waiting (register 0x06) =100
Conversion time = (11.53 + 18*0.1)*16 + 100*2 = 413.28ms
AL3220寄存器如下:
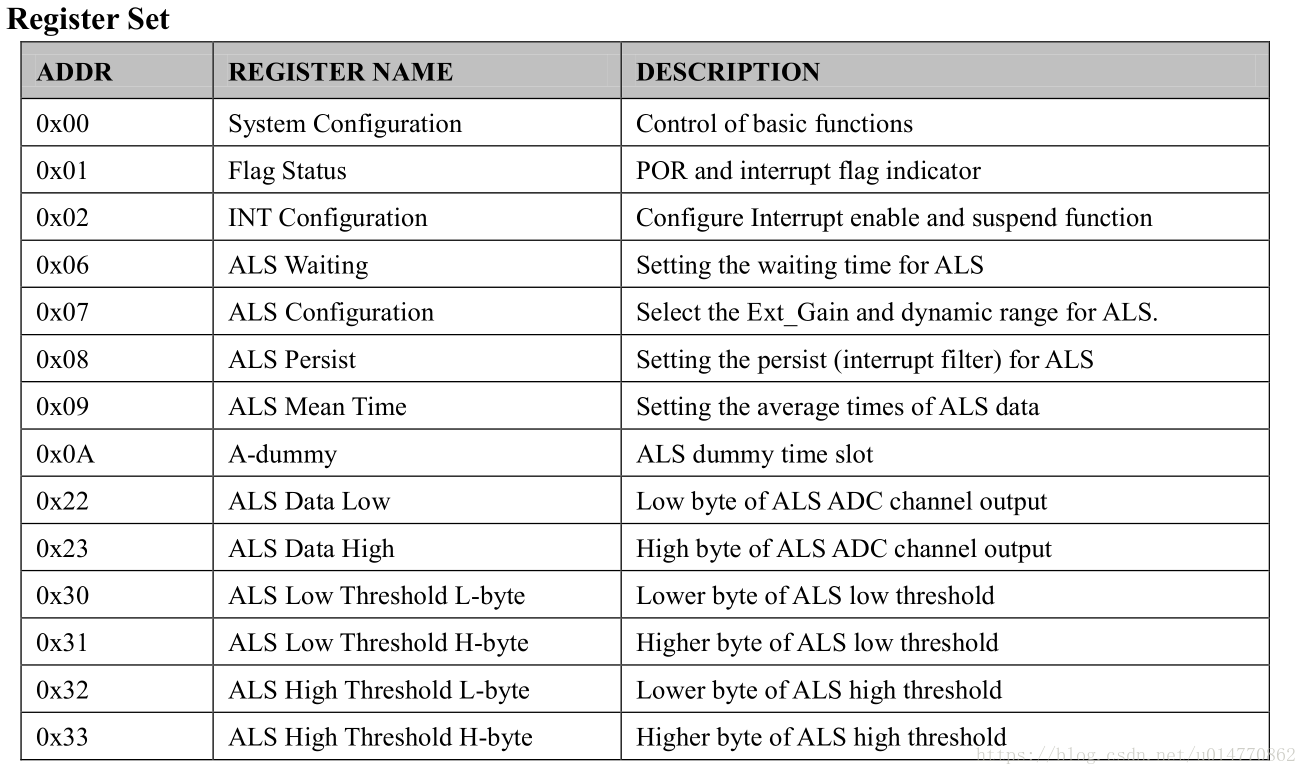
首先需要enable light sensor,然后设定Ext_Gain and dynamic range for ALS的值,再根据
Conversion time计算公式,将各个值写入相应的寄存器,如下所示:
ret = i2c_smbus_write_byte_data(client, AL3320A_REG_CONFIG,
AL3320A_CONFIG_ENABLE);
if (ret < 0)
return ret;
ret = i2c_smbus_write_byte_data(client, AL3320A_REG_CONFIG_RANGE,
AL3320A_RANGE_3 << AL3320A_GAIN_SHIFT);
if (ret < 0)
return ret;
ret = i2c_smbus_write_byte_data(client, AL3320A_REG_MEAN_TIME,
0xf);
if (ret < 0)
return ret;
ret = i2c_smbus_write_byte_data(client, AL3320A_REG_ADUMMY,
0x12);
if (ret < 0)
return ret;
ret = i2c_smbus_write_byte_data(client, AL3320A_REG_WAIT,
0x64);
if (ret < 0)
return ret;这里设定的mean time是0xf,A-dummy的值是0x12, ALS Waiting的值是0x64,因此总的Conversion time是413.28ms,这个Conversion time怎么用呢?
probe
Sensor驱动初始化时sensor_probe()会从dts中获取一个变量” poll_delay_ms”, Conversion time就是这个值。
Sensor驱动采用轮询方式获取光感数据,在sensor_probe()中初始化时会先注册工作队列用于轮询获取光感数据:
sensor_irq_init() --->
INIT_DELAYED_WORK(&sensor->delaywork, sensor_delaywork_func);当HAL层ioctl打开光感设备/dev/lightsensor时,sensor驱动最终调用schedule_delayed_work()唤起工作队列sensor_delaywork_func,该函数实现如下:
static void sensor_delaywork_func(struct work_struct *work)
{
struct delayed_work *delaywork = container_of(work, struct delayed_work, work);
struct sensor_private_data *sensor = container_of(delaywork, struct sensor_private_data, delaywork);
struct i2c_client *client = sensor->client;
mutex_lock(&sensor->sensor_mutex);
if (sensor_get_data(client) < 0)
DBG(KERN_ERR "%s: Get data failedn",__func__);
if(!sensor->pdata->irq_enable)//restart work while polling
schedule_delayed_work(&sensor->delaywork, msecs_to_jiffies(sensor->pdata->poll_delay_ms));
//else
//{
//if((sensor->ops->trig == IRQF_TRIGGER_LOW) || (sensor->ops->trig == IRQF_TRIGGER_HIGH))
//enable_irq(sensor->client->irq);
//}
mutex_unlock(&sensor->sensor_mutex);
DBG("%s:%sn",__func__,sensor->i2c_id->name);
}调用sensor_get_data(),函数实现如下:
static int sensor_get_data(struct i2c_client *client)
{
struct sensor_private_data *sensor =
(struct sensor_private_data *) i2c_get_clientdata(client);
int result = 0;
result = sensor->ops->report(client);
if(result)
goto error;
/* set data_ready */
atomic_set(&sensor->data_ready, 1);
/*wake up data_ready work queue*/
wake_up(&sensor->data_ready_wq);
error:
return result;
}AL3220初始化时调用sensor_register_slave()将sensor_operate注册到sensor核心中,这里调用其report方法sensor_report_value,在该函数中,读取sensor的数据并上报。
最后
以上就是昏睡御姐最近收集整理的关于AL3220光感调试记录的全部内容,更多相关AL3220光感调试记录内容请搜索靠谱客的其他文章。








发表评论 取消回复