CC2530/Zigbee协议栈配置外部中断
- 一、I/O端口
- 二、配置寄存器
- 三、中断处理函数
一、I/O端口
1、在CC2530芯片中,其I/O口用作通用 I/O 时,引脚可以组成 3 个 8 位端口,端口 0、端口 1 和端口 2,表示为 P0、P1 和 P2。其中,P0和 P1 是完全的 8 位端口,而 P2 仅有 5 位可用。所有的端口均可以通过 SFR 寄存器 P0、P1 和 P2 位寻址和字节寻址。每个端口引脚都可以单独设置为通用 I/O 或外部设备 I/O。
2、用作输入时,通用 I/O 端口引脚可以设置为上拉、下拉或三态操作模式。作为缺省的情况,复位之后,所有的端口均设置为带上拉的输入。
3、通用 I/O 引脚设置为输入后,均可用于产生外部中断。中断可以设置在外部信号的上升或下降沿触发,P0、P1或 P2 端口都有中断使能位。
二、配置寄存器
????上面提到,I/O口默认状态为上拉输入,而通用 I/O 引脚设置为输入后,均可用于产生外部中断。所以我们只需要配置中断相关的寄存器即可。
????下面将以P0_5为例讲解寄存器的配置
①配置上拉输入(默认状态)
P0SEL &= ~0x20;//普通io模式
P0DIR &= ~0x20;//输入模式
P0INP &= ~0x20;//上下拉输入
P2INP &= ~0x20;//bit5 p0端口全部上拉
②配置中断寄存器
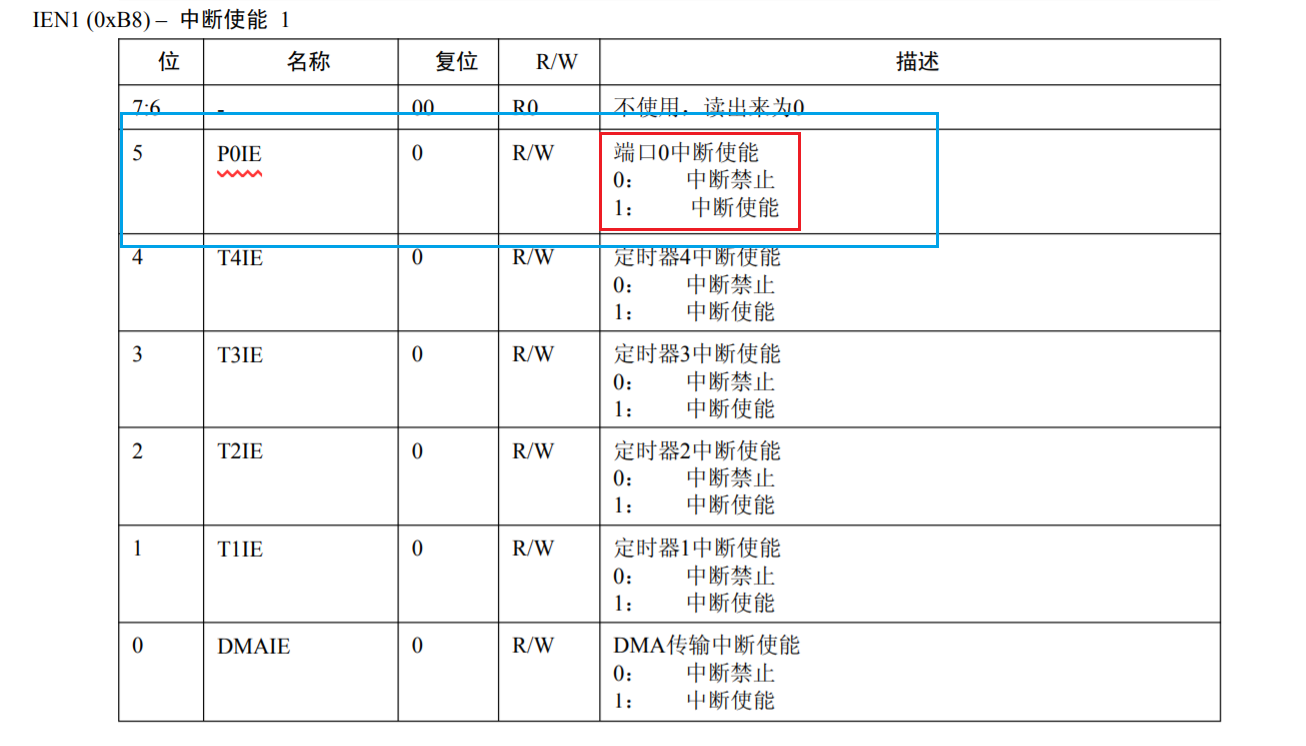
IEN1 |= 0x20; //P0IE(Bit5) 允许P0口中断;
P0IEN |= 0x20; //P0_5 设置为中断方式 1:中断使能
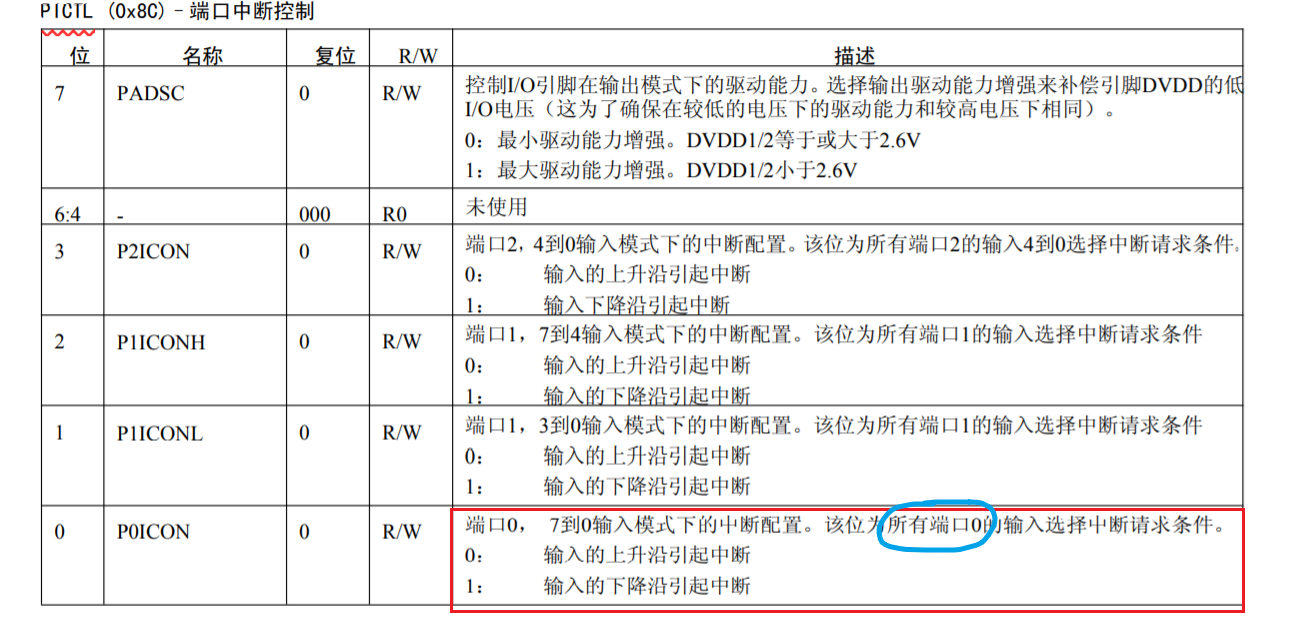
PICTL |= 0x01; //P0_5下降沿触发
P0IFG = 0;
EA = 1; //打开总中断
cc2530外部中断只需要配置IEN1、P0IEN、PICTL、P0IFG 这4个寄存器
- P0IE(Bit5) 允许P0口中断
- P0_5 设置为中断方式 1:中断使能

- P0_5下降沿触发
- 端口0的中断状态标志位,0:无中断,1:产生中断

- EA = 1; //打开总中断
至此中断配置完成????
三、中断处理函数
在zigbee协议栈中,有规定了中断处理函数的规范,建议按照其规范来定义中断处理函数
在hal_mcu.h文件中,有如下定义????
#define HAL_ISR_FUNC_DECLARATION(f,v) _PRAGMA(vector=v) __near_func __interrupt void f(void)
#define HAL_ISR_FUNC_PROTOTYPE(f,v) _PRAGMA(vector=v) __near_func __interrupt void f(void)
#define HAL_ISR_FUNCTION(f,v) HAL_ISR_FUNC_PROTOTYPE(f,v); HAL_ISR_FUNC_DECLARATION(f,v)
我们写中断处理函数时,应该按照如下格式????
//P0_ISR:函数名,P0INT_VECTOR:中断向量
HAL_ISR_FUNCTION( P0_ISR, P0INT_VECTOR )
{
...
...
...
}
其实函数头HAL_ISR_FUNCTION是一个宏定义
#define HAL_ISR_FUNCTION(f,v) HAL_ISR_FUNC_PROTOTYPE(f,v); HAL_ISR_FUNC_DECLARATION(f,v)
它展开后又是2个宏定义HAL_ISR_FUNC_PROTOTYPE和HAL_ISR_FUNC_DECLARATION(????禁止套娃hhhh~)
这里的两部分代码“HAL_ISR_FUNC_PROTOTYPE”和“HAL_ISR_FUNC_DECLARATION”,第一部分代码为函数声明,第二部分代码为函数原型。这两部分的代码展开皆为
_PRAGMA(vector=v) __near_func __interrupt void f(void)
现在我们将HAL_ISR_FUNCTION( P0_ISR, P0INT_VECTOR )部分完全展开可得下列程序:
//函数声明
_PRAGMA(vector=P0INT_VECTOR ) __near_func __interrupt void P0_ISR(void)
//函数原型
_PRAGMA(vector=P0INT_VECTOR ) __near_func __interrupt void P0_ISR(void)
{
/*先清除引脚标志位,再清除端口标志位,否则会不断进入中断*/
P0IFG &= ~0x20;
P0IF &= ~0x20;
...
...
...
}
附上中断向量表????
/* ------------------------------------------------------------------------------------------------
* Interrupt Vectors
* ------------------------------------------------------------------------------------------------
*/
#define RFERR_VECTOR VECT( 0, 0x03 ) /* RF TX FIFO Underflow and RX FIFO Overflow */
#define ADC_VECTOR VECT( 1, 0x0B ) /* ADC End of Conversion */
#define URX0_VECTOR VECT( 2, 0x13 ) /* USART0 RX Complete */
#define URX1_VECTOR VECT( 3, 0x1B ) /* USART1 RX Complete */
#define ENC_VECTOR VECT( 4, 0x23 ) /* AES Encryption/Decryption Complete */
#define ST_VECTOR VECT( 5, 0x2B ) /* Sleep Timer Compare */
#define P2INT_VECTOR VECT( 6, 0x33 ) /* Port 2 Inputs */
#define UTX0_VECTOR VECT( 7, 0x3B ) /* USART0 TX Complete */
#define DMA_VECTOR VECT( 8, 0x43 ) /* DMA Transfer Complete */
#define T1_VECTOR VECT( 9, 0x4B ) /* Timer 1 (16-bit) Capture/Compare/Overflow */
#define T2_VECTOR VECT( 10, 0x53 ) /* Timer 2 (MAC Timer) */
#define T3_VECTOR VECT( 11, 0x5B ) /* Timer 3 (8-bit) Capture/Compare/Overflow */
#define T4_VECTOR VECT( 12, 0x63 ) /* Timer 4 (8-bit) Capture/Compare/Overflow */
#define P0INT_VECTOR VECT( 13, 0x6B ) /* Port 0 Inputs */
#define UTX1_VECTOR VECT( 14, 0x73 ) /* USART1 TX Complete */
#define P1INT_VECTOR VECT( 15, 0x7B ) /* Port 1 Inputs */
#define RF_VECTOR VECT( 16, 0x83 ) /* RF General Interrupts */
#define WDT_VECTOR VECT( 17, 0x8B ) /* Watchdog Overflow in Timer Mode */
注意
按照上面说的步骤配置完后,可以进行测试。我在一开始测试时,发现无法进入中断处理函数,解决方法????
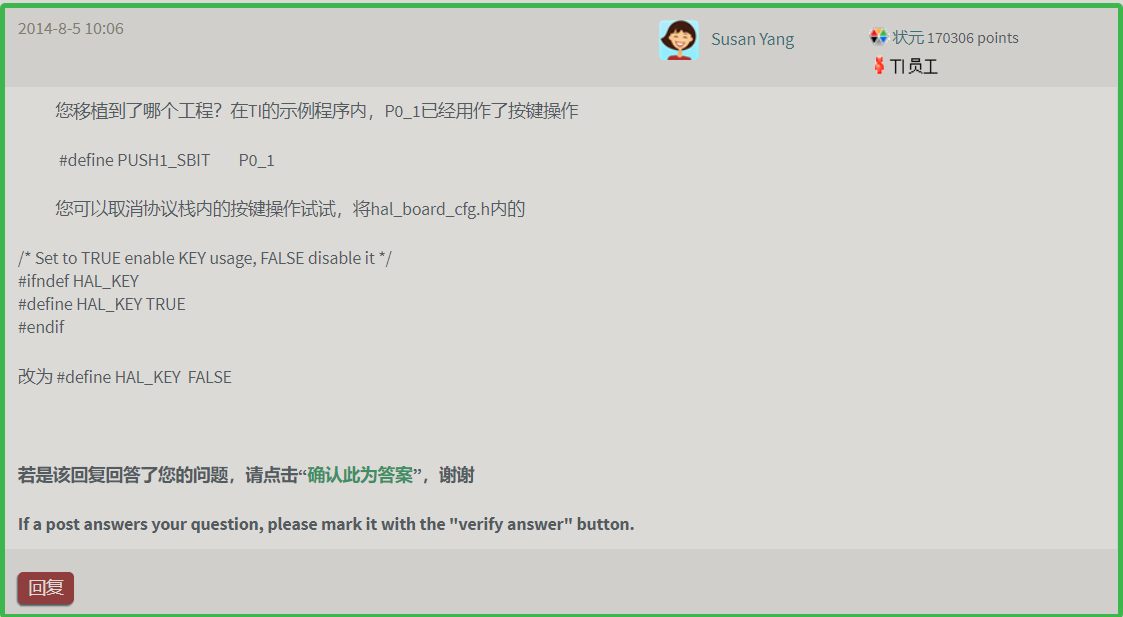
P0_5也是同样原因,在我把HAL_KEY定义为FALSE后,就可以正常进入中断了~
最后
以上就是单纯小霸王最近收集整理的关于CC2530/Zigbee协议栈外部中断配置详解一、I/O端口二、配置寄存器三、中断处理函数的全部内容,更多相关CC2530/Zigbee协议栈外部中断配置详解一、I/O端口二、配置寄存器三、中断处理函数内容请搜索靠谱客的其他文章。








发表评论 取消回复