世界坐标、相机坐标、图像坐标、像素坐标的原理、关系,并用matlab仿真
照相机是日常生活中最常见的。它能把三维的空间图片等比例缩小投影在照片上,称为一个二维图像。
以下我们就讲一讲原理,并相应的进行matlab仿真。
在学之前,先要了解几个概念:
- 什么是世界坐标?
- 也就是真实世界的立体空间坐标,是一个三维坐标系
- Ow-XwYwZw :世界坐标系,描述相机位置,单位m
- 什么是相机坐标?
- 根据透镜成像原理,将世界坐标在照相机内呈现,是一个三维坐标系
- Oc-XcYcZc :相机坐标系,光心为原点,单位m
- 什么是图像坐标?
- 将相机呈现的三维坐标投影到屏幕上,而建立的新坐标系,不含高程信息,是一个二维坐标系
- o-xy :图像坐标系,原点为成像平面中点,单位mm
- 什么是像素坐标?
- 将投影的图像坐标离散抽样形成的做种图片,是一个二维的坐标系
- uv :像素坐标系,原点为图像左上角,单位pixel
所以步骤流程就是:
-
- step1:将世界坐标转化为相机坐标,等比例缩小,外加旋转平移,称之为刚体变换;
- step2:将相机坐标转化为图像坐标,称为投影
- step3:将图像坐标离散抽样
模型如下图所示:

step1:构造rigbt()函数
世界坐标转化为相机坐标模型如下图所示:
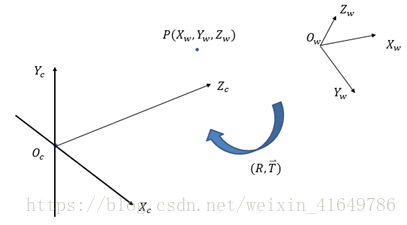
从世界坐标系变换到相机坐标系属于刚体变换:即物体不会发生形变,只需要进行旋转和平移。
R:表示旋转矩阵
T:表示偏移向量
接下来分析旋转和平移
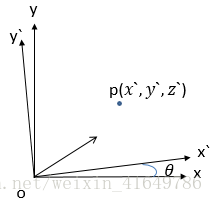
坐标轴绕z轴旋转 θ=Theta(希腊字母读法,编程用的到),其几何模型如下图所示:
公式满足:
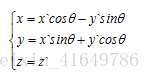
矩阵形式为:
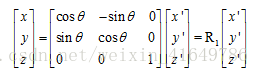
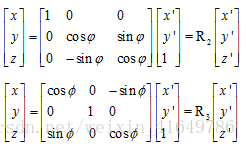
同理,绕x、y轴可以写成:
所以刚体变化中旋转变换R=R1R2R3。
平移矩阵T,则刚体变换可以写成:
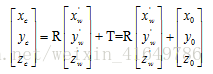
进一步转化,可以写成4阶矩阵:
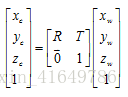
R矩阵是一个3×3矩阵,T是一个3×1矩阵,RT是一个4×4矩阵。
matlab 仿真:
function [RT] = rigbt(Phi, Psi, Theta, x0, y0, z0)
%刚体变换函数:rigid body transformation
%输入参数:
% φ=Phi 绕x轴转动的角度
% ψ=Psi 绕y轴转动的角度
% θ=Theta 绕z轴转动的角度
%输出参数:
% RT 将坐标轴进行刚体变化(旋转+平移)成新的坐标轴
%
%% 程序
R1 = [1 0 0; 0 cos(Phi) sin(Phi); 0 -sin(Phi) cos(Phi)];%绕X轴旋转
R2 = [cos(Psi) 0 -sin(Psi); 0 1 0; sin(Psi) 0 cos(Psi)];%绕Y轴旋转
R3 = [cos(Theta) sin(Theta) 0;-sin(Theta) cos(Theta) 0; 0 0 1 ];%绕Z轴旋转
R = R3 * R1 * R2;%旋转矩阵(刚体变换一部分)
T = [x0; y0; z0];%平移矩阵
RT=[R T;0 0 0 1];%刚体变换矩阵
return
step2:构造proj()函数
相机坐标投影成图像坐标,几何模型如下图所示:
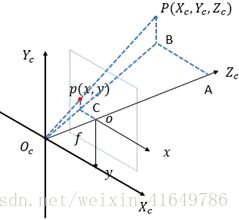
几何关系(相似)满足:
![]()
即:
![]()
代入:
![]()
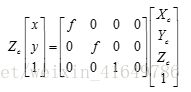
写成矩阵形式:
matlab 仿真:
function [Projection_Matrix] = proj(f)
%相机坐标投影(projection)成图像坐标
%输入参数
% f 相机焦距(数,cm)
%输出参数
% Projection_Matrix 投影成像(矩阵)
Projection_Matrix = [f 0 0 0; 0 f 0 0; 0 0 1 0];
returnstep3:构造pixel()函数
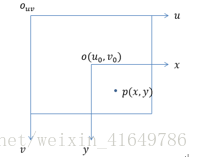
xoy是图像坐标; uo_{uv}v是像素坐标; (u0,v0)是像素坐标的中心; p(x,y)是图像中的任意一点。
模型如下:
将x、y分成n份,每份长度为dx、dy。
则几何公式为:
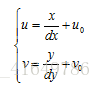
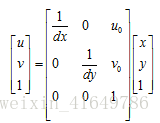
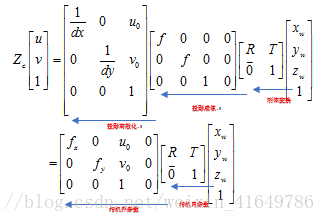
转化为矩阵形式:
matlab仿真:
function [Pixel_Matrix] = pixel(dx,dy,u0,v0)
%图像坐标离散化,转化为像素坐标
%输入参数:
% dx x轴方向上分辨率,像素大小
% dy y轴方向上分辨率,像素大小
% (u0,v0) 参考坐标,图像平面中心
if nargin==2
u0 = 0;
v0 = 0;
end
Pixel_Matrix = [1/dx 0 u0; 0 1/dy v0; 0 0 1];
return
step4:前三步整合
公式中, fx=f/dx,fy=f/dy。
matlab 主程序
% 将世界坐标转化为像素坐标的参数
%% 程序
clear all;close all; clc;
% 参数
Phi = pi/4;%绕x轴旋转角度
Psi = pi/4;%绕y轴旋转角度
Theta = pi/4;%绕z轴旋转角度
x0 = 0;%x平移量
y0 = 0;%y平移量
z0 = 0;%z平移量
f = 35e-3;%35mm相机
dx = 0.026;%一个像素的长
dy = 0.026;%一个像素的宽
u0 = 0;%图像平面中心
v0 =0;%图像平面中心
%% step1:将世界坐标转化为相机坐标,等比例缩小,外加旋转平移(刚体变换)
RT = rigbt(Phi, Psi, Theta, x0, y0, z0);%刚体变换矩阵
%% step2:将相机坐标转化为图像坐标(投影)
Projection_Matrix = proj(f);%投影矩阵
%% step3:将图像坐标离散抽样
Pixel_Matrix = pixel(dx,dy,u0,v0);%1像素=0.635厘米÷24≈0.026458厘米
%% 数据整合
Camera_Internal_Parameters = Pixel_Matrix * Projection_Matrix;%相机内参数
Camera_External_Parameters = RT;%相机外参数
%清除不用的变量
clearvars -except Camera_Internal_Parameters Camera_External_Parameters
%相机参数
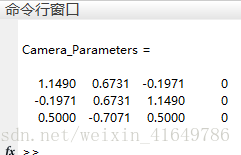
Camera_Parameters = Camera_Internal_Parameters*Camera_External_Parameters
clearvars -except Camera_Parameters%清除变量
仿真结果:
扩展:
实际应用中,往往将上面的主程序main制作成一个相机参数函数camera_ parameters(),更有利于调用。可以用下面相机参数函数一个代替上面的main程序。
matlab 仿真
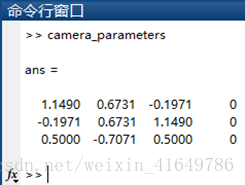
function [Camera_Parameters] = camera_parameters()
% 将世界坐标转化为像素坐标的参数(相机参数矩阵)
% 参数,可以省,省去的话,必须设置相应的入参
Phi = pi/4;%绕x轴旋转角度
Psi = pi/4;%绕y轴旋转角度
Theta = pi/4;%绕z轴旋转角度
x0 = 0;%x平移量
y0 = 0;%y平移量
z0 = 0;%z平移量
f = 35e-3;%35mm相机
dx = 0.026;%一个像素的长
dy = 0.026;%一个像素的宽
u0 = 0;
v0 =0;
%% step1:将世界坐标转化为相机坐标,等比例缩小,外加旋转平移(刚体变换)
RT = rigbt(Phi, Psi, Theta, x0, y0, z0);%刚体变换矩阵
%% step2:将相机坐标转化为图像坐标(投影)
Projection_Matrix = proj(f);%投影矩阵
%% step3:将图像坐标离散抽样
Pixel_Matrix = pixel(dx,dy,u0,v0);%1像素=0.635厘米÷24≈0.026458厘米
%% 数据整合
Camera_Internal_Parameters = Pixel_Matrix * Projection_Matrix;%相机内参数
Camera_External_Parameters = RT;%相机外参数
%相机参数
Camera_Parameters = Camera_Internal_Parameters*Camera_External_Parameters;
仿真结果:
注:
- 程序中好多参数是本人找的,有的参数,我简单化了。也可以改参数运行。
- 本文参考了:https://download.csdn.net/download/chentravelling/9833120
- 本博客文档下载地址:https://download.csdn.net/download/weixin_41649786/10629546
- 本博客代码下载地址:https://download.csdn.net/download/weixin_41649786/10629733
给学matlab的人,包括我自己一个勉励:路漫漫其修遠兮,吾將上下而求索
最后
以上就是雪白音响最近收集整理的关于世界坐标、相机坐标、图像坐标、像素坐标的原理、关系,并用matlab仿真世界坐标、相机坐标、图像坐标、像素坐标的原理、关系,并用matlab仿真的全部内容,更多相关世界坐标、相机坐标、图像坐标、像素坐标内容请搜索靠谱客的其他文章。








发表评论 取消回复