源码获取请查看第一篇文章。
1.qs100模块简单使用笔记(电信物联网平台ctwing)
本章讲解串口使用,
QS100共有三个串口,Uart0,Uart1,Uart2,在原理图里简称为U0,U1,U2。
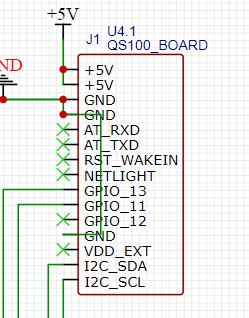
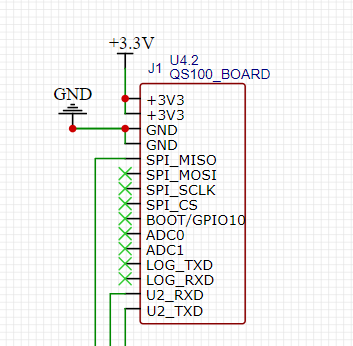
Uart0是图中的LOG Uart1就是图中的U2_RXD,U2_TXD Uart2就是SPI的miso mosi
typedef enum
{
ZOS_UART_BUS_1,
ZOS_UART_BUS_2,
ZOS_UART_BUS_NONE
} ZOS_UART_BUS;
这是串口的设备号
但是我在使用时,
ZOS_UART_BUS_1对应的实际引脚是U2,
ZOS_UART_BUS_2对应的实际引脚是SPI的miso mosi
这一点需要注意。
UART发送任务实现:
void hal_uart_IT_demo_task(void)
{
ZOS_UART_CONFIG uart_cfg;
uart_cfg.baud_rate=9600;
uart_cfg.data_bits=ZOS_UART_DATA_BITS_8;
uart_cfg.parity=ZOS_UART_PARITY_NONE;
uart_cfg.stop_bits=ZOS_UART_STOP_BITS_1;
zos_uart_init(ZOS_UART_BUS_1,&uart_cfg,uart_callback);
while(1)
{
zos_task_delay(5000);
zos_uart_write(ZOS_UART_BUS_1,"open",4);
}
}
/**
* @brief 任务创建
*
*/
void hal_uart_IT_demo_task_init(void)
{
demo_uart_handle = zos_task_create("hal_uart_IT_demo_task",hal_uart_IT_demo_task, ZOS_NULL, 1024, task_Priority_Normal);
}
int zos_main(void)
{
//如需调整shell口波特率,请调用此函数,最高可设置921600,默认不调用,波特率即115200
//shell_uart_set_baud_rate(9600);
//创建用户任务,注意任务的Priority 优先级不能全部设置为同一个等级,自己后期创建的任务需要根据任务的情况适当的降低或者提高优先级。
hal_uart_IT_demo_task_init();
//user_main_task_Handle = zos_task_create ("user_main_task",user_main_task,ZOS_NULL,USER_MAIN_STACK_SIZE,task_Priority_BelowNormal);
}```
最后
以上就是醉熏小鸭子最近收集整理的关于2.QS100 NB模块开发,串口使用的全部内容,更多相关2.QS100内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复