一 设计要求
1、 开发板上三个led等分别代表公路上红黄绿三种颜色交通灯。
2、 交通灯状态机初始状态为红灯,交通灯工作过程依次是红→绿→黄→红。
3、 为了方便观察,本次实验要求红灯的显示时间为9s,绿灯显示时间为6s,黄灯显示时间为3s,时间需要倒计时,在数码管上显示。编程之前要求先画好ASM图。
5、 第三次实验课用到EP2C8Q208C8通过74HC595驱动数码管,可调用verilog数码管驱动模块。EP2C8Q208C8的SCTP,SHCP,SER_DATA数码管信号线通过两块74HC595集成块,再驱动数码管。
二 八段数码管译码列表

三 交通灯设计
实验模块包括:分频器模块、复位部分、交通灯显示模块,扩位模块。其中复位部分包括1个状态:reset0,红灯部分包括9个状态:r1到r9,绿灯部分包括6个状态:r1到r6,黄灯部分包括3个状态:y1到y3。其中,对脉冲信号进行2的n次方分之一的分频,实现分频器分频。扩位模块采用补0操作实现将4位二进制数转为16位二进制数。
四 代码实现
分频器
library ieee;
use ieee.std_logic_1164.all;
use ieee.std_logic_arith.all;
entity clkdiv is
generic(n:integer:=50000000);
port(clk_50MHZ:in std_logic;
clk_1HZ:out std_logic);
end clkdiv;
architecture behavior of clkdiv is
signal count:integer range n-1 downto 0:=n-1;
begin
process(clk_50MHZ)
begin
if(clk_50MHZ'event and clk_50MHZ='1'and clk_50MHZ'last_value='0') then
count<=count-1;
if count>=n/2 then
clk_1HZ<='0';
else
clk_1HZ<='1';
end if;
if count<=0 then
count<=n-1;
end if;
end if;
end process;
end behavior;
交通灯控制
LIBRARY IEEE;
USE IEEE.std_logic_1164.ALL;
USE IEEE.std_logic_unsigned.all;
ENTITY traffic_light is
PORT(clk:IN std_logic;
rst_n:IN std_logic;
red_light:OUT std_logic;
green_light:OUT std_logic;
yellow_light:OUT std_logic;
holdtime:OUT integer range 0 TO 9);
END ENTITY;
ARCHITECTURE Behav OF traffic_light IS
TYPE state_type IS (reset0,r1,r2,r3,r4,r5,r6,r7,r8,r9,g1,g2,g3,g4,g5,g6,y1,y2,y3);
SIGNAL present_state,next_state:state_type;
BEGIN
seq:PROCESS(clk,rst_n)
BEGIN
IF(rst_n='0') THEN
present_state<=reset0;
ELSIF(rising_edge(clk)) THEN
present_state<=next_state;
END IF;
END PROCESS;
com:PROCESS(next_state)
BEGIN
red_light<='0';
green_light<='1';
yellow_light<='1';
holdtime<=0;
CASE present_state IS
WHEN reset0=>
red_light<='0';
green_light<='1';
yellow_light<='1';
holdtime<=0;
next_state<=r1;
WHEN r1=>
red_light<='0';
green_light<='1';
yellow_light<='1';
holdtime<=9;
next_state<=r2;
WHEN r2=>
red_light<='0';
green_light<='1';
yellow_light<='1';
holdtime<=8;
next_state<=r3;
WHEN r3=>
red_light<='0';
green_light<='1';
yellow_light<='1';
holdtime<=7;
next_state<=r4;
WHEN r4=>
red_light<='0';
green_light<='1';
yellow_light<='1';
holdtime<=6;
next_state<=r5;
WHEN r5=>
red_light<='0';
green_light<='1';
yellow_light<='1';
holdtime<=5;
next_state<=r6;
WHEN r6=>
red_light<='0';
green_light<='1';
yellow_light<='1';
holdtime<=4;
next_state<=r7;
WHEN r7=>
red_light<='0';
green_light<='1';
yellow_light<='1';
holdtime<=3;
next_state<=r8;
WHEN r8=>
red_light<='0';
green_light<='1';
yellow_light<='1';
holdtime<=2;
next_state<=r9;
WHEN r9=>
red_light<='0';
green_light<='1';
yellow_light<='1';
holdtime<=1;
next_state<=g1;
WHEN g1=>
red_light<='1';
green_light<='0';
yellow_light<='1';
holdtime<=6;
next_state<=g2;
WHEN g2=>
red_light<='1';
green_light<='0';
yellow_light<='1';
holdtime<=5;
next_state<=g3;
WHEN g3=>
red_light<='1';
green_light<='0';
yellow_light<='1';
holdtime<=4;
next_state<=g4;
WHEN g4=>
red_light<='1';
green_light<='0';
yellow_light<='1';
holdtime<=3;
next_state<=g5;
WHEN g5=>
red_light<='1';
green_light<='0';
yellow_light<='1';
holdtime<=2;
next_state<=g6;
WHEN g6=>
red_light<='1';
green_light<='0';
yellow_light<='1';
holdtime<=1;
next_state<=y1;
WHEN y1=>
red_light<='1';
green_light<='1';
yellow_light<='0';
holdtime<=3;
next_state<=y2;
WHEN y2=>
red_light<='1';
green_light<='1';
yellow_light<='0';
holdtime<=2;
next_state<=y3;
WHEN y3=>
red_light<='1';
green_light<='1';
yellow_light<='0';
holdtime<=1;
next_state<=r1;
END CASE;
END PROCESS;
END Behav;
扩位
LIBRARY IEEE;
USE IEEE.std_logic_1164.ALL;
USE IEEE.std_logic_unsigned.all;
ENTITY data is
PORT(clk:IN std_logic;
input4bit:IN std_logic_vector(3 DOWNTO 0);
output16bit:OUT std_logic_vector(15 DOWNTO 0));
END ENTITY;
ARCHITECTURE behav OF data IS
BEGIN
output16bit<="ZZZZZZZZZZZZZZZZ";
PROCESS(clk,input4bit)
BEGIN
IF(rising_edge(clk))
THEN
output16bit<="000000000000"&input4bit;
END IF;
END PROCESS;
END behav;
数码管驱动
module seg(
clk,rst_n,en,
idis_data,
ds_stcp,ds_shcp,ds_data
);
input clk; //25M??????
input rst_n; //??????????
input en;
input [15:0] idis_data ;
output ds_stcp; //74HC595????????????????????????
output ds_shcp; //74HC595?????????????????????
output ds_data; //74HC595???????
//????? 0~F ??????
parameter SEG_NUM0 = 8'hc0,
SEG_NUM1 = 8'hf9,
SEG_NUM2 = 8'ha4,
SEG_NUM3 = 8'hb0,
SEG_NUM4 = 8'h99,
SEG_NUM5 = 8'h92,
SEG_NUM6 = 8'h82,
SEG_NUM7 = 8'hF8,
SEG_NUM8 = 8'h80,
SEG_NUM9 = 8'h90,
SEG_NUMA = 8'h88,
SEG_NUMB = 8'h83,
SEG_NUMC = 8'hc6,
SEG_NUMD = 8'ha1,
SEG_NUME = 8'h86,
SEG_NUMF = 8'h8e;
//????? 0~7????
parameter SEG_WE0 = 8'b1111_1110,
SEG_WE1 = 8'b1111_1101,
SEG_WE2 = 8'b1111_1011,
SEG_WE3 = 8'b1111_0111;
// SEG_WE4 = 8'b1110_1111,
// SEG_WE5 = 8'b1101_1111,
// SEG_WE6 = 8'b1011_1111,
// SEG_WE7 = 8'b0111_1111;
wire en;
reg clk_div_2;
reg clk1;
always@(en) //use enable siganl to break the module
begin
if (en==1)
clk1<=clk;
else clk1<=clk1;
end
always@(posedge clk1 or negedge rst_n)
if(!rst_n)
clk_div_2<=1'b0;
else
clk_div_2<=~clk_div_2;
//-------------------------------------------------
//-------------------------------------------------
//??????????
reg[3:0] seg_num; //??????
reg[7:0] seg_duan; //7???????????????8??
reg[7:0] seg_wei; //7????????
reg[7:0] cnt_4; //?????
//?????
always @(posedge clk_div_2 or negedge rst_n)
if(!rst_n) cnt_4 <= 8'd0;
else cnt_4 <= cnt_4+1'b1;
//????
always @(posedge clk_div_2 or negedge rst_n)
if(!rst_n) seg_num <= 8'h00;
else
case(cnt_4[7:6])
2'b00: seg_num <= idis_data[3:0];
2'b01: seg_num <= idis_data[7:4];
2'b10: seg_num <= idis_data[11:8];
2'b11: seg_num <= idis_data[15:12];
default: ;
endcase
//??????
reg flag;
always @(posedge clk_div_2 or negedge rst_n)
if(!rst_n) begin seg_duan <= 8'hff;
// flag<=1'b0;
end
//else if(flag) begin seg_duan<=8'hff;
// flag<=~flag;
// end
else
case(seg_num)
4'h0: seg_duan <= SEG_NUM0;
4'h1: seg_duan <= SEG_NUM1;
4'h2: seg_duan <= SEG_NUM2;
4'h3: seg_duan <= SEG_NUM3;
4'h4: seg_duan <= SEG_NUM4;
4'h5: seg_duan <= SEG_NUM5;
4'h6: seg_duan <= SEG_NUM6;
4'h7: seg_duan <= SEG_NUM7;
4'h8: seg_duan <= SEG_NUM8;
4'h9: seg_duan <= SEG_NUM9;
4'ha: seg_duan <= SEG_NUMA;
4'hb: seg_duan <= SEG_NUMB;
4'hc: seg_duan <= SEG_NUMC;
4'hd: seg_duan <= SEG_NUMD;
4'he: seg_duan <= SEG_NUME;
4'hf: seg_duan <= SEG_NUMF;
default: ;
endcase
//????
always @(cnt_4[7:6])
case(cnt_4[7:6])
2'b00: seg_wei <= SEG_WE0;
2'b01: seg_wei <= SEG_WE1;
2'b10: seg_wei <= SEG_WE2;
2'b11: seg_wei <= SEG_WE3;
default: seg_wei <= 8'b0000_0000;
endcase
//-------------------------------------------------
//74HC95????
reg ds_stcpr; //74HC595????????????????????????
reg ds_shcpr; //74HC595?????????????????????
reg ds_datar; //74HC595???????
//????????
always @(posedge clk_div_2 or negedge rst_n)
if(!rst_n) ds_shcpr <= 1'b0;
else if((cnt_4 > 8'h02 && cnt_4 <= 8'h22) || (cnt_4 > 8'h24 && cnt_4
<= 8'h44)
|| (cnt_4 > 8'h46 && cnt_4 <= 8'h66) || (cnt_4 > 8'h68 && cnt_4
<= 8'h88)
|| (cnt_4 > 8'h90 && cnt_4 <= 8'hb0) || (cnt_4 > 8'hb2 && cnt_4
<= 8'hd2)
|| (cnt_4 > 8'hd4 && cnt_4 <= 8'hf4))
ds_shcpr <= ~ds_shcpr;
else ds_shcpr<=1'b0;
//????????
always @(posedge clk_div_2 or negedge rst_n)
if(!rst_n) ds_datar <= 1'b0;
else
case(cnt_4)
8'h02,8'h46,8'h90,8'hd4: ds_datar <= seg_duan[7];
8'h04,8'h48,8'h92,8'hd6: ds_datar <= seg_duan[6];
8'h06,8'h4a,8'h94,8'hd8: ds_datar <= seg_duan[5];
8'h08,8'h4c,8'h96,8'hda: ds_datar <= seg_duan[4];
8'h0a,8'h4e,8'h98,8'hdc: ds_datar <= seg_duan[3];
8'h0c,8'h50,8'h9a,8'hde: ds_datar <= seg_duan[2];
8'h0e,8'h52,8'h9c,8'he0: ds_datar <= seg_duan[1];
8'h10,8'h54,8'h9e,8'he2: ds_datar <= seg_duan[0];
8'h12,8'h56,8'ha0,8'he4: ds_datar <= seg_wei[0];
8'h14,8'h58,8'ha2,8'he6: ds_datar <= seg_wei[1];
8'h16,8'h5a,8'ha4,8'he8: ds_datar <= seg_wei[2];
8'h18,8'h5c,8'ha6,8'hea: ds_datar <= seg_wei[3];
8'h1a,8'h5e,8'ha8,8'hec: ds_datar <= seg_wei[4];
8'h1c,8'h60,8'haa,8'hee: ds_datar <= seg_wei[5];
8'h1e,8'h62,8'hac,8'hf0: ds_datar <= seg_wei[6];
8'h20,8'h64,8'hae,8'hf2: ds_datar <= seg_wei[7];
8'h24,8'h68,8'hb2,: ds_datar <= 1;
8'h26,8'h6a,8'hb4,: ds_datar <= 1;
8'h28,8'h6c,8'hb6,: ds_datar <= 1;
8'h2a,8'h6e,8'hb8,: ds_datar <= 1;
8'h2c,8'h70,8'hba,: ds_datar <= 1;
8'h2e,8'h72,8'hbc,: ds_datar <= 1;
8'h30,8'h74,8'hbe,: ds_datar <= 1;
8'h32,8'h76,8'hc0,: ds_datar <= 1;
8'h34,8'h78,8'hc2,: ds_datar <= 1;
8'h36,8'h7a,8'hc4,: ds_datar <= 1;
8'h38,8'h7c,8'hc6,: ds_datar <= 1;
8'h3a,8'h7e,8'hc8,: ds_datar <= 1;
8'h3c,8'h80,8'hca,: ds_datar <= 1;
8'h3e,8'h82,8'hcc,: ds_datar <= 1;
8'h40,8'h84,8'hce,: ds_datar <= 1;
8'h42,8'h86,8'hd0,: ds_datar <= 1;
default: ds_datar <= seg_duan[0];
endcase
//????????
always @(posedge clk1 or negedge rst_n)
if(!rst_n) ds_stcpr <= 1'b0;
else if((cnt_4 == 8'h02) || (cnt_4 == 8'h23) || (cnt_4 == 8'h45) ||
(cnt_4 == 8'h67) || (cnt_4 == 8'h89)|| (cnt_4 == 8'hb1)|| (cnt_4 == 8'hd3))
ds_stcpr <= 1'b0;
else if((cnt_4 == 8'h22) || (cnt_4 == 8'h44) || (cnt_4 == 8'h66) ||
(cnt_4 == 8'h88) || (cnt_4 == 8'hb0)|| (cnt_4 == 8'hd2)|| (cnt_4 == 8'hf4))
ds_stcpr <= 1'b1;
wire ds_stcp = ds_stcpr;
wire ds_shcp = ds_shcpr;
wire ds_data = ds_datar;
endmodule
五 整机电路图
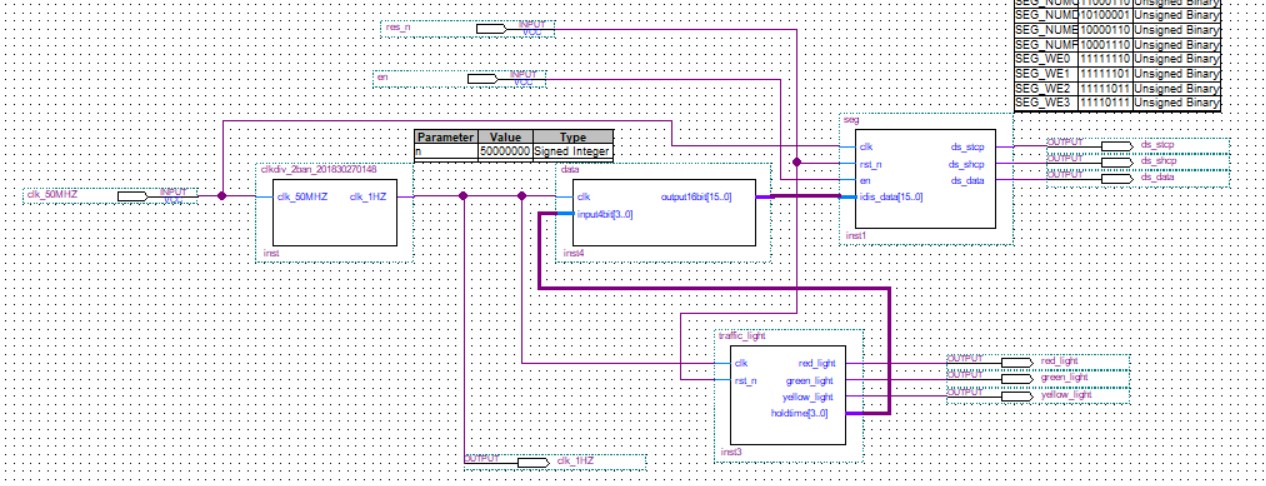
六 仿真结果

七 实验结果
(a) 红灯9秒

(b) 红灯8秒

© 红灯7秒

(d) 红灯6秒

(e) 红灯5秒

(f) 红灯4秒

(g) 红灯3秒

(h) 红灯2秒

(i) 红灯1秒

(j) 绿灯6秒

(k) 绿灯5秒

(l) 绿灯4秒

(m) 绿灯3秒

(n) 绿灯2秒

(o) 绿灯1秒

§ 黄灯3秒

(q) 黄灯2秒

® 黄灯1秒

最后
以上就是超帅小蝴蝶最近收集整理的关于基于状态机的交通灯控制(vhdl)的全部内容,更多相关基于状态机内容请搜索靠谱客的其他文章。








发表评论 取消回复