文章目录
- 参考资料:
- 如何使用Arduino UNO、操纵杆模块和NRF24L01模块控制伺服电机
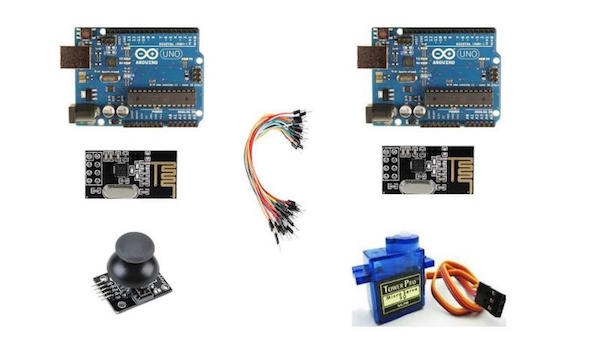
- 1. 必需的组件
- 2. 伺服电机控制如何工作
- 3. NRF24L01引脚说明
- 4. 电路原理图
- 5. 代码介绍
参考资料:
- rf24库:https://github.com/nRF24/RF24
rf24库文档:http://tmrh20.github.io/RF24/ - NRF24L01模块datasheet:https://download.csdn.net/download/acktomas/11135884
如何使用Arduino UNO、操纵杆模块和NRF24L01模块控制伺服电机
本文转自:https://www.yiboard.com/thread-1095-1-1.html
基于Arduino和NRF24L01模块制作发射器和接收器,实现使用操纵杆控制伺服电机!
在本篇文章中,我们主要介绍如何使用NRF24L01和Arduino控制伺服电机。我们在发送端移动操纵杆,使用NRF24L01,将操纵杆移动的值发送到接收侧,然后在接收侧接收该值,使用此值移动伺服电机。
1. 必需的组件
- Arduino开发板
- NRF24L01模块
- 操纵杆模块
- 伺服电机
- 连接导线
2. 伺服电机控制如何工作
在发送侧,我们有一个操纵杆模块、Arduino和NRF24L01,而在接收侧,我们有一个NRF24L01、Arduino和一个伺服电机。
当我们在水平方向上移动操纵杆时,操纵杆模块将向Arduino发送模拟值。我们已将NRF24L01模块设置为发送模式,并将操纵杆移动值发送到特定地址。
在接收侧,将NRF24L01模块设置为接收模式。我们在接收端给出了相同的地址,其他NRF24L01模块正在传输数据。因此,只要模块接收到数据,Arduino就会读取数据并根据它移动伺服电机。 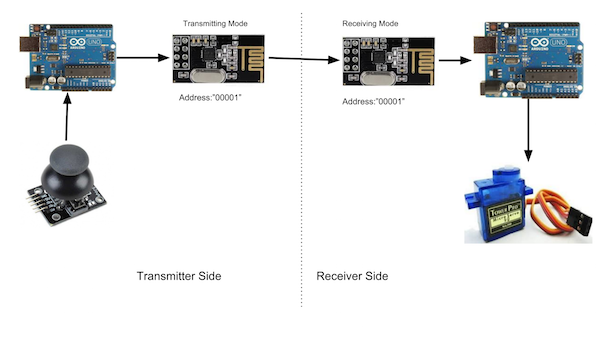
3. NRF24L01引脚说明
该模块的功耗非常低。它在传输过程中消耗大约12mA的功率,甚至低于LED。
该模块工作在3.3V,因此不要将其直接连接到5V的Arduino,因为它可能会损坏。 NRF24L01模块的其他引脚具有5V容限,因此您可以将它们直接连接到Arduino。
SCK、MOSI和MISO引脚用于SPI通信,CSN和CE引脚用于设置待机或活动模式以及设置发送或命令模式。 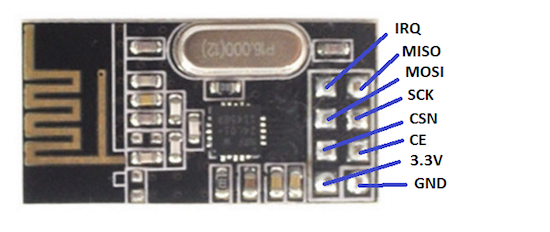
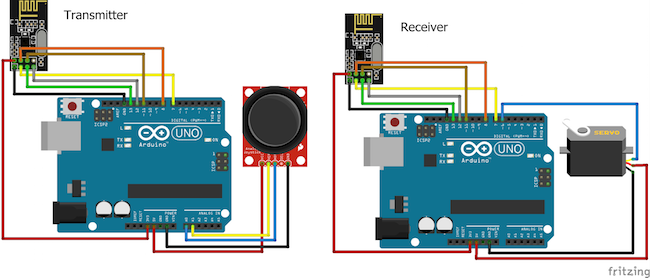
4. 电路原理图
连接有点冗长,因此我将分别介绍发送器和接收器的连接。
在发送器侧,NRF24L01与Arduino的连接如下:
- 将NRF24L01的3.3V引脚与Arduino的3.3V连接
- 将NRF24L01的GND引脚与Arduino的GND连接
- 将NRF24L01的CSN引脚与Arduino的引脚8连接
- 将NRF24L01的CE引脚与Arduino的引脚7连接
- 将NRF24L01的SCK引脚与Arduino的引脚13连接
- 将NRF24L01的MOSI引脚与Arduino的引脚11连接
- 将NRF24L01的MISO引脚与Arduino的引脚12连接
然后将操纵杆模块与Arduino连接如下:
- 操纵杆模块的VCC到Arduino的5V
- 操纵杆模块的GND到Arduino的GND
- 操纵杆模块的VER到Arduino的A1
- 操纵杆模块的HOR到Arduino的A0
在接收器侧,NRF24L01与Arduino的连接与发送器侧的连接相同。使用Arduino连接伺服电机如下:
- 红线到Arduino的5V
- 棕色线到Arduino的GND
- 黄色线到Arduino的引脚6
5. 代码介绍
首先,包括NRF24L01和伺服电机的库
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <Servo.h>
然后,定义我们连接NRF24L01的CSN和CE引脚的引脚。之后,我们初始化将发送和接收数据的地址。该地址在发射机和接收机侧应该相同。该地址可以是任何五个字母的字符串。
RF24 radio(7, 8); // CSN, CE
const byte address[6] = "00001";
在发送器的setup()函数中,我们设置了发送数据的地址。然后将功率放大范围设置为最小,因为模块彼此很接近。
radio.openWritingPipe(address);
radio.setPALevel(RF24_PA_MIN);
在接收器侧,我们使用以下命令并设置模块以从该地址接收数据。
radio.openReadingPipe(0, address);
在发送器的loop()函数中,我们从操纵杆模块读取并在我们之前设置的地址发送值。
radio.write(&x_pos, sizeof(x_pos));
接收器侧的以下命令将从发送器获取数据,并且在将数据映射到0-180之后,我们将移动伺服电机。
radio.read(&x_pos, sizeof(x_pos));
发送器和接收器的完整代码如下所示: https://download.csdn.net/download/acktomas/11114570
主机代码:
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
RF24 radio(7, 8); // CSN, CE
const byte address[6] = "00001";
int x_key = A1;
int y_key = A0;
int x_pos;
int y_pos;
void setup() {
radio.begin();
radio.openWritingPipe(address);
radio.setPALevel(RF24_PA_MIN);
radio.stopListening();
pinMode (x_key, INPUT) ;
pinMode (y_key, INPUT) ;
}
void loop() {
x_pos = analogRead (x_key) ;
y_pos = analogRead (y_key) ;
radio.write(&x_pos, sizeof(x_pos));
delay(100);
}
接收端代码:
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <Servo.h>
Servo servo;
RF24 radio(7, 8); // CSN, CE
const byte address[6] = "00001";
int servo_pin = 6;
void setup() {
Serial.begin(9600);
radio.begin();
servo.attach (servo_pin ) ;
radio.openReadingPipe(0, address);
radio.setPALevel(RF24_PA_MIN);
radio.startListening();
}
void loop() {
if (radio.available()) {
int x_pos ;
radio.read(&x_pos, sizeof(x_pos));
Serial.println(x_pos);
x_pos = map(x_pos, 0, 1023, 0, 180);
if (x_pos>400 && x_pos<600)
{
}
else{
servo.write (x_pos) ;
}
}
}
最后
以上就是风中鼠标最近收集整理的关于如何使用Arduino UNO、操纵杆模块和NRF24L01模块控制伺服电机参考资料:如何使用Arduino UNO、操纵杆模块和NRF24L01模块控制伺服电机的全部内容,更多相关如何使用Arduino内容请搜索靠谱客的其他文章。








发表评论 取消回复