一、Android Sensor的框架
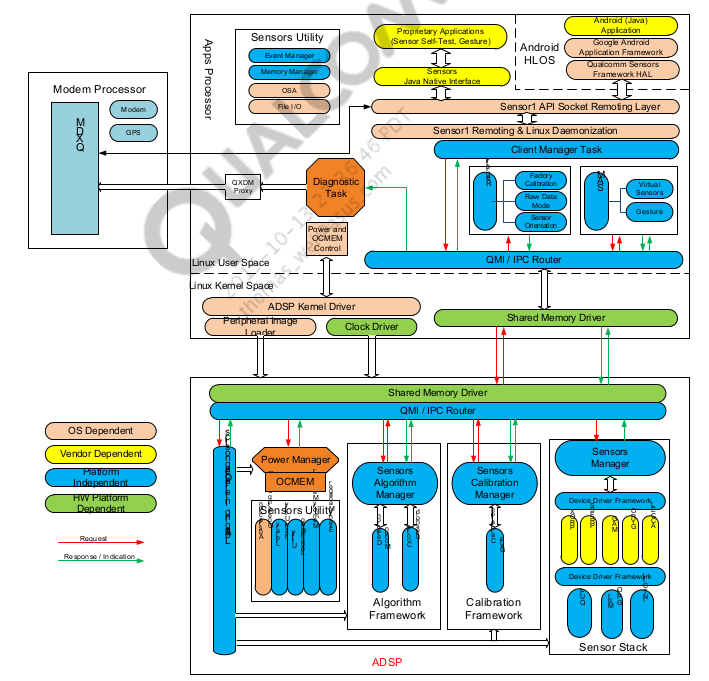
在刚开始的时候,Android上的sensor调用还是在走内核的,通过芯片厂商编写相应的设备驱动来生成设备节点供上层访问,以读取设备节点的方式来读取sensor数据,但是后来人们发现这样做会增加功耗,因为sensor需要不断的上报数据,不断的更新数据,所以这就要求处理器不断为其工作,所以就会影响待机功耗,故高通在MSM8960之后就提出了一种方案,把sensor数据的处理放到ADSP中处理,ADSP在处理音频数据的数据顺便把sensor数据处理掉,降低功耗。因此在MSM8953后sensor数据的处理都放在ADSP中处理,并向以往那样通过节点的方式来获取数据。下面就是sensor数据处理的结构框图:
二、sensor的调用流程
1.framework调用流程图
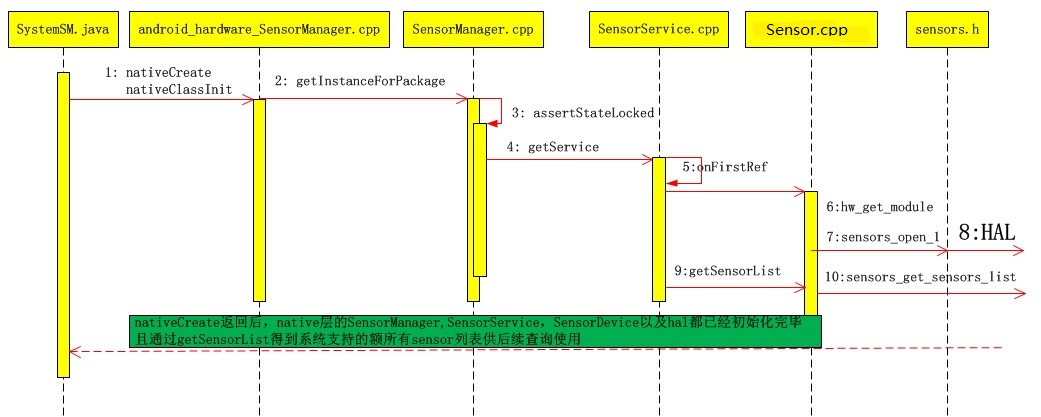
1.1 hardware加载sensor hal层模块的代码流程
上层会起一个SensorService服务,在随后的第一次初始化时,其onFirstRef会被调用(均继承自RefBase虚基类),紧接着,它会获取Sensors::Sensors()构造函数,去通过hw_get_module()函数去加载sensor hal层的代码以及sensor 结构体。
Sensors::Sensors()
: mInitCheck(NO_INIT),
mSensorModule(nullptr),
mSensorDevice(nullptr) {
status_t err = OK;
if (UseMultiHal()) {
mSensorModule = ::get_multi_hal_module_info();
} else {
err = hw_get_module(
SENSORS_HARDWARE_MODULE_ID,
(hw_module_t const **)&mSensorModule);
}
if (mSensorModule == NULL) {
err = UNKNOWN_ERROR;
}
if (err != OK) {
LOG(ERROR) << "Couldn't load "
<< SENSORS_HARDWARE_MODULE_ID
<< " module ("
<< strerror(-err)
<< ")";
mInitCheck = err;
return;
}
err = sensors_open_1(&mSensorModule->common, &mSensorDevice);
if (err != OK) {
LOG(ERROR) << "Couldn't open device for module "
<< SENSORS_HARDWARE_MODULE_ID
<< " ("
<< strerror(-err)
<< ")";
mInitCheck = err;
return;
}
// Require all the old HAL APIs to be present except for injection, which
// is considered optional.
CHECK_GE(getHalDeviceVersion(), SENSORS_DEVICE_API_VERSION_1_3);
if (getHalDeviceVersion() == SENSORS_DEVICE_API_VERSION_1_4) {
if (mSensorDevice->inject_sensor_data == nullptr) {
LOG(ERROR) << "HAL specifies version 1.4, but does not implement inject_sensor_data()";
}
if (mSensorModule->set_operation_mode == nullptr) {
LOG(ERROR) << "HAL specifies version 1.4, but does not implement set_operation_mode()";
}
}
mInitCheck = OK;
}
识别HAL层模块是通过ID来匹配识别的,ID:SENSORS_HARDWARE_MODULE_ID,识别到了会返回一个handle句柄,这个句柄会赋给mSensorModule,这个句柄我们可以在vendor/qcom/proprietary/sensors/dsps/libhalsensors/src/sensors_hal.cpp中查看到,就是下面的结构体,会把这个结构体返回给mSensorModule,上层后期会通过这个结构体来打开sensor驱动;
static struct hw_module_methods_t sensors_module_methods = {
.open = sensors_open
};
struct sensors_module_t HAL_MODULE_INFO_SYM = {
.common = {
.tag = HARDWARE_MODULE_TAG,
.module_api_version = (uint16_t)SENSORS_DEVICE_API_VERSION_1_4,
.hal_api_version = HARDWARE_HAL_API_VERSION,
.id = SENSORS_HARDWARE_MODULE_ID,
.name = "QTI Sensors Module",
.author = "Qualcomm Technologies, Inc.",
.methods = &sensors_module_methods,
.dso = NULL,
.reserved = {0},
},
.get_sensors_list = sensors_get_sensors_list,
.set_operation_mode = sensors_set_operation_mode
};struct sensors_module_t {
struct hw_module_t common;
/**
* Enumerate all available sensors. The list is returned in "list".
* return number of sensors in the list
*/
int (*get_sensors_list)(struct sensors_module_t* module,
struct sensor_t const** list);
/**
* Place the module in a specific mode. The following modes are defined
*
* 0 - Normal operation. Default state of the module.
* 1 - Loopback mode. Data is injected for the supported
* sensors by the sensor service in this mode.
* return 0 on success
* -EINVAL if requested mode is not supported
* -EPERM if operation is not allowed
*/
int (*set_operation_mode)(unsigned int mode);
};那么问题来了,hardware是如何加载到vendor/qcom/proprietary/sensors/dsps/下的HAL层的呢?
加载流程如下:
SensorService::onFirstRef()---->sensorService启动时加载
Sensors::Sensors()
hw_get_module(SENSORS_HARDWARE_MODULE_ID,(hw_module_t const **)&mSensorModule);--->通过ID去匹配
hw_get_module_by_class();
load(class_id, path, module);---->加载sensor hal层编译出来的.so库文件,使用load()去加载这个库文件,
这个.so文件是根据Android.mk里面的规则来编译出来的。可通过readelf -s 命令读取这个.so文件;
static int load(const char *id,
const char *path,
const struct hw_module_t **pHmi)
{
int status = -EINVAL;
void *handle = NULL;
struct hw_module_t *hmi = NULL;
/*
* load the symbols resolving undefined symbols before
* dlopen returns. Since RTLD_GLOBAL is not or'd in with
* RTLD_NOW the external symbols will not be global
*/
handle = dlopen(path, RTLD_NOW);
if (handle == NULL) {
char const *err_str = dlerror();
ALOGE("load: module=%sn%s", path, err_str?err_str:"unknown");
status = -EINVAL;
goto done;
}
/* Get the address of the struct hal_module_info. */
const char *sym = HAL_MODULE_INFO_SYM_AS_STR;
hmi = (struct hw_module_t *)dlsym(handle, sym);
if (hmi == NULL) {
ALOGE("load: couldn't find symbol %s", sym);
status = -EINVAL;
goto done;
}
/* Check that the id matches */
if (strcmp(id, hmi->id) != 0) {
ALOGE("load: id=%s != hmi->id=%s", id, hmi->id);
status = -EINVAL;
goto done;
}
hmi->dso = handle;
/* success */
status = 0;
done:
if (status != 0) {
hmi = NULL;
if (handle != NULL) {
dlclose(handle);
handle = NULL;
}
} else {
ALOGV("loaded HAL id=%s path=%s hmi=%p handle=%p",
id, path, *pHmi, handle);
}
*pHmi = hmi;
return status;
}
1. 首先通过dlopen打开sensors.xxx.so模块,获得其句柄handle;
2.调用dlsym去获取结构体hw_module_t结构体的地址,注意这里传入的字符串为HAL_MODULE_INFO_SYM_AS_STR,定义在hardware.h头文件中;
readelf -s sensors.XXX.so
528: 0001073d 4 FUNC GLOBAL DEFAULT 12 _ZN10ThermopileD2Ev
529: 0002f564 40 FUNC GLOBAL DEFAULT 12 __floatunsisf
530: 00010179 176 FUNC GLOBAL DEFAULT 12 _ZN22AbsoluteMotionDetect
531: 00010229 4 FUNC GLOBAL DEFAULT 12 _ZN22AbsoluteMotionDetect
532: 0001bbb1 540 FUNC GLOBAL DEFAULT 12 _ZN24PersistentMotionDete
533: 0002c97d 96 FUNC GLOBAL DEFAULT 12 _ZN7Utility28isDirectChan
534: 00028cb1 440 FUNC GLOBAL DEFAULT 12 _ZN3Tap6enableEi
535: 0002f3d4 400 FUNC GLOBAL DEFAULT 12 __aeabi_fadd
536: 0002b2c1 188 FUNC GLOBAL DEFAULT 12 _ZN15TimeSyncService13rol
537: 00017259 404 FUNC GLOBAL DEFAULT 12 _ZN18LinearAcceleration12
538: 0003d0a4 4 OBJECT GLOBAL DEFAULT 22 _ZN7Latency25latency_meas
539: 00020a6d 444 FUNC GLOBAL DEFAULT 12 _ZN10SMGRSensor13SMGRRepo
540: 00013b85 948 FUNC GLOBAL DEFAULT 12 _ZN18GameRotationVector10
541: 0003d010 136 OBJECT GLOBAL DEFAULT 21 HMI
542: 00011a79 540 FUNC GLOBAL DEFAULT 12 _ZN17DeviceOrientation6en
543: 000296e5 14 FUNC GLOBAL DEFAULT 12 _ZN6ThreshD0Ev
544: 00016085 8 FUNC GLOBAL DEFAULT 12 _ZN9Gyroscope13prepareAdd
545: 00015f65 288 FUNC GLOBAL DEFAULT 12 _ZN9Gyroscope16processRep
546: 00028149 604 FUNC GLOBAL DEFAULT 12 _ZN12StepDetector6enableE
547: 000299e9 572 FUNC GLOBAL DEFAULT 12 _ZN6Thresh6enableEi
高通的Sensor实现了自己的HAL,其源码在vendor/qcom/proprietary/sensors/dsps/libhalsensors路径下,通过Android.mk我们也可以确定他确实是我们前面load方法打开的动态链接库,其编译后会生成sensors.ssc.so:
# vendor/qcom/proprietary/sensors/dsps/libhalsensors/Android.mk
ifeq ($(USE_SENSOR_MULTI_HAL),true)
LOCAL_MODULE := sensors.ssc
LOCAL_CLANG := false
else
LOCAL_MODULE := sensors.$(TARGET_BOARD_PLATFORM)
LOCAL_MODULE_RELATIVE_PATH := hw
endif
到这里整个hw_get_module()加载完毕,会把sensor hal层的HAL_MODULE_INFO_SYM这个结构体返回给hw_get_module()里的mSensorModule变量,然后在sensors_open_1(&mSensorModule->common, &mSensorDevice);去打开这个sensor驱动函数;
static inline int sensors_open_1(const struct hw_module_t* module,
sensors_poll_device_1_t** device) {
return module->methods->open(module,
SENSORS_HARDWARE_POLL, (struct hw_device_t**)device);
}
static inline int sensors_close_1(sensors_poll_device_1_t* device) {
return device->common.close(&device->common);
由HMI的结构体定义,其中module->common->open被赋值为sensors_module_methods,其只有一个open方法,因此,module->methods->open最终会调用sensors_open方法来打开驱动程序;
2.sensor 驱动文件的添加
2.1 在头文件中注册sensor ,添加该款的sensor的变量;
路径:vendor/qcom/non-hlos-msm8953/ADSP.8953.2.8.4/adsp_proc/Sensors/dd/qcom/inc/sns_dd.h;
extern sns_ddf_driver_if_s sns_mag_akm8963_driver_fn_list;
extern sns_ddf_driver_if_s sns_mag_akm8975_driver_fn_list;
extern sns_ddf_driver_if_s sns_alt_bmp085_driver_fn_list;
extern sns_ddf_driver_if_s sns_dd_acc_lis3dh_if;
extern sns_ddf_driver_if_s sns_dd_mag_lsm303dlhc_if;1.2 添加驱动文件
路径:
未完待续......
最后
以上就是义气丝袜最近收集整理的关于Android8.0 下的 qcom8953 平台上的 sensor 调用过程的全部内容,更多相关Android8.0内容请搜索靠谱客的其他文章。








发表评论 取消回复