导航在这里:Arduino四足开源机器猫
- 首先,我们准备一块蓝牙模块,淘宝上支持串口透传的蓝牙模块都是可以用的。如下图为我买的蓝牙模块HC-05。
led指示蓝牙连接状态,快闪表示没有蓝牙连接,慢闪表示进入AT模式,双闪表示蓝牙已连接并打开了端口。
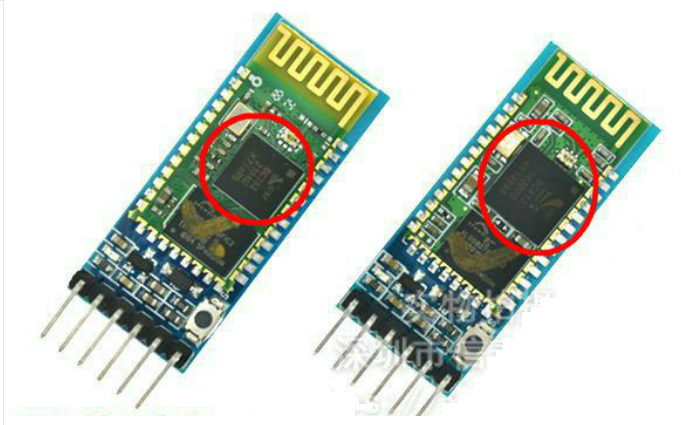
这块蓝牙模块是蓝牙主从一体的,要稍微贵一些,蓝牙模块可以作为主机也可以作为从机,主设备与从设备的区别为,主设备可以扫描从设备蓝牙,主动连上从设备,而从设备蓝牙只能等待搜索被连接,无法主动连接别的蓝牙。淘宝上还有一些蓝牙模块仅有从机模式,无法设置主从模式,在这里也是可以用的,由于我们使用手机连接,手机可以扫描周围蓝牙设备并主动连接,因此手机是主设备,小猫为从设备,我们的小猫身上用到的蓝牙就是从机模式。
蓝牙通常有两种工作模式,一种AT指令调试模式用于对蓝牙进行设置,另一种为串口透传模式用于工作时透传数据。
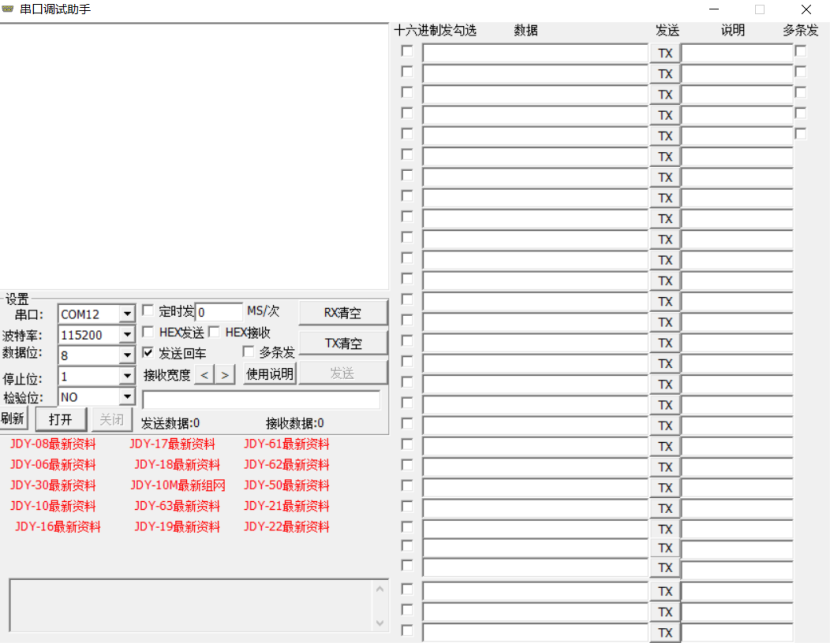
因此,在使用蓝牙模块之前,我们需要让蓝牙模块进入AT指令调试模式,对蓝牙模块进行相关设置。需要用到一款串口工具,串口工具众多,我们从网上下载的一般来说都可以用,功能基本一样,下面是我电脑上用到的串口工具。在Open cat文件夹中可以顺利找到。
蓝牙模块主要做一个数据透传功能,跟从Arduino IDE里面控制是一样的。
必须设置的选项为:
- 蓝牙的主从模式。
- 蓝牙串口通讯的波特率
- 蓝牙的名字(避免多个蓝牙名字相同无法分辨)。
蓝牙进入AT指令模式的方法多样,具体可以参考蓝牙模块的使用手册,下面仅给出HC05蓝牙模块AT指令调试例程做参考。
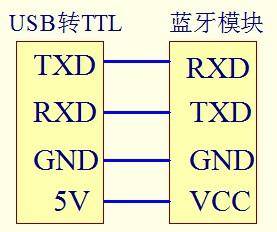
用两边都是母头的杜邦线将FTDI下载器与HC-05模块连接好。
按住模块上面黑色按键,然后上电,即可进入AT指令模式,如下图所示。

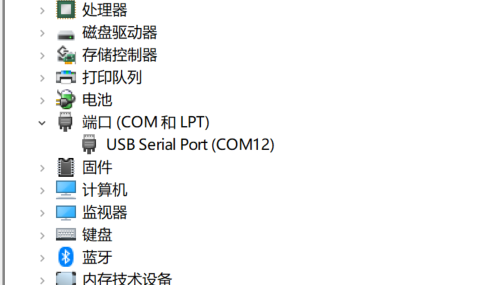
连接好线之后,先不要着急,找到设备管理器看一下当前蓝牙在哪个端口上。
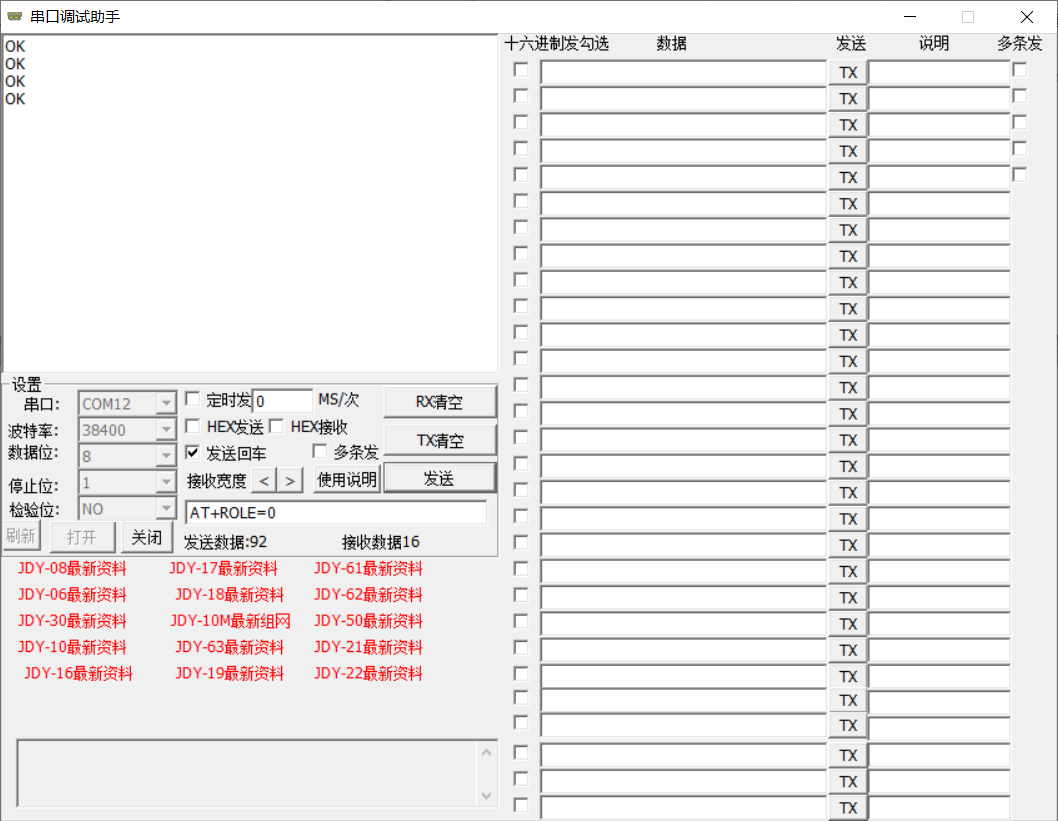
然后打开软件,我这里默认AT指令模式的波特率是38400.软件设置如下
(1)波特率是38400,
(2)串口选择COM12,
(3)勾选发送回车
然后点击打开按钮。
输入AT,窗口上面返回OK。这说明我们成功进入了AT指令模式。
然后依次输入以下三行设置指令,每输入一行指令,点击发送。
AT+NAME=Opencat9
AT+UART=57600,0,0
AT+ROLE=0
每次发送一次指令,如果设置成功,都会在窗口返回OK。我们可以看到一共返回了3个OK,说明全部设置成功。
设置成功之后,就可以将蓝牙模块与小猫接上。
HC-05蓝牙模块与小猫主板的接线方式:
HC-05 Opencat
VCC —— +5V
GND —— GND
RXD —— TXO
TXD —— RXI
这样我们就可以用了,将小猫通电之后,在手机上搜索到该蓝牙,然后我们点击目标蓝牙进行配对,默认密码是:1234或者0000。
2.然后我们安装好蓝牙调试器,这个软件是用于控制小猫的,具体操作如下。
如果是华为手机或者荣耀手机,直接再应用市场搜索“蓝牙调试器”就可以在官方安装比较方便。

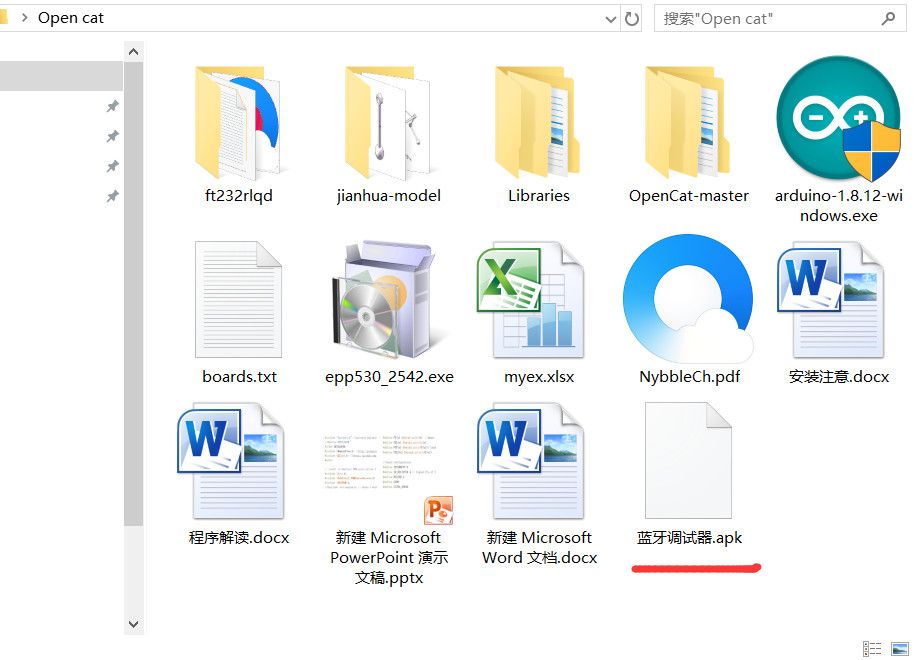
如果是其他安卓手机的话,我们可以到我给的资料里面找到Open cat文件夹,里面有“蓝牙调试器.apk”,找到这个文件之后单击一下,基本就可以开始安装了。
3.安装成功之后,我们启动软件
如下图,软件会询问是否开启蓝牙,然后选择允许开启就行。

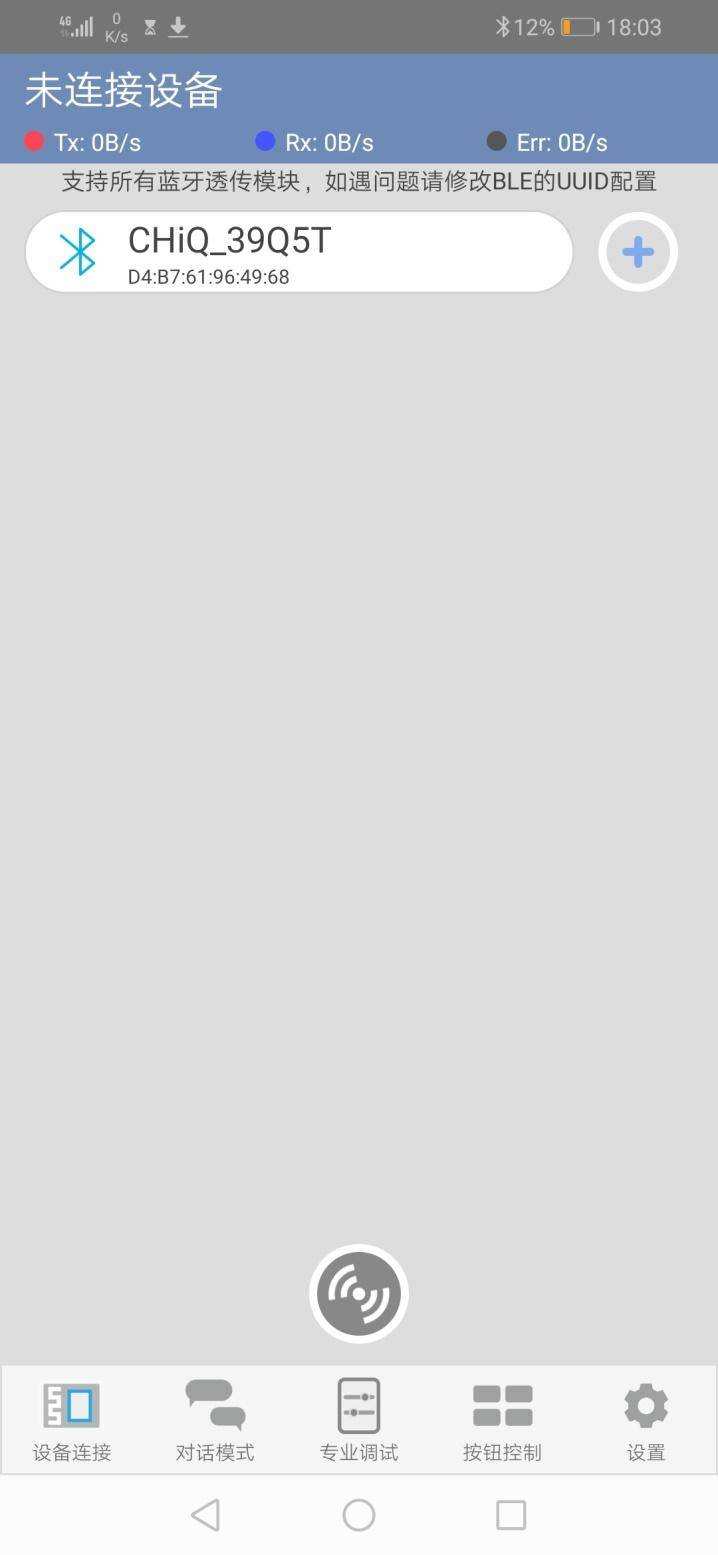
4.接着,我们用手机连接小猫,当未连接设备时,左上角会显示未连接设备,一般进入软件会自动搜索设备,如果没有自动搜索的话,我们点击一下中间靠近下方的那个按钮,可以开始扫描。

5.然后我们可以在软件界面看到小猫连接的蓝牙,点击后面的加号进行连接即可。
6.通过对话模式或者按钮控制方式控制小猫。
在对话模式发送控制指令可以控制小猫:
以下为具体指令(全部技能可根据程序具体查找):
krest 或者 d - 停止舵机
kbalance - 起立
kwk - 前进
kwkL - 左转
kwkR - 右转
kbk - 后退
ksleep - 睡眠
ksit - 坐下
kvt - 原地踏步
kpee-抬腿
kcr-爬行
或者通过按钮模式进行控制:
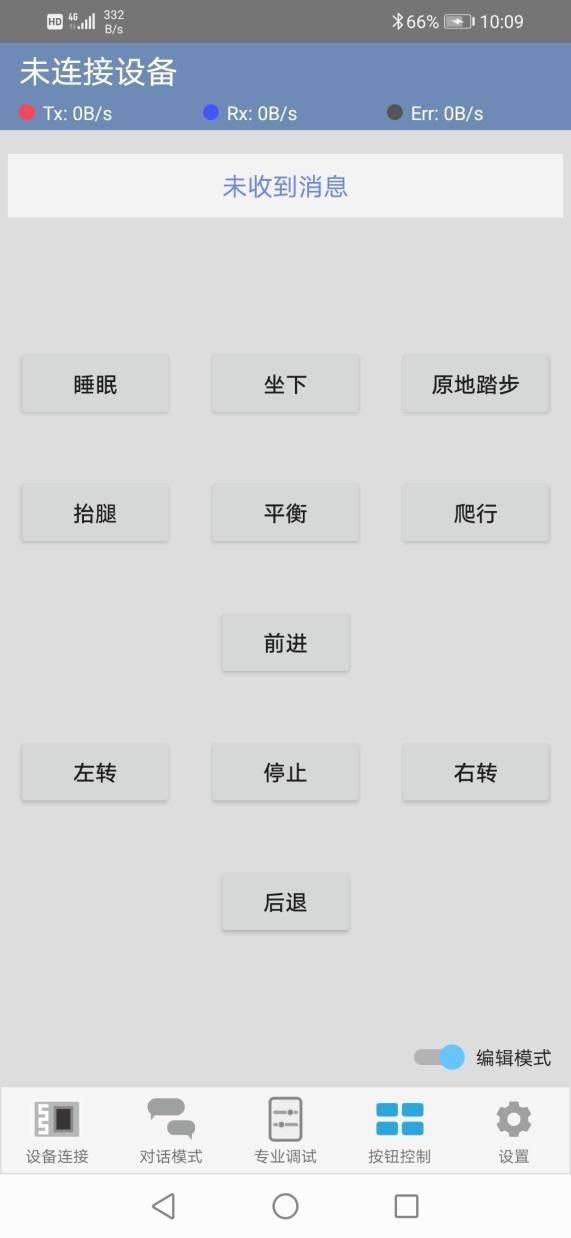
点击右下角的编辑按钮,开始编辑每个按钮的提示和发送的指令,如下图所示:
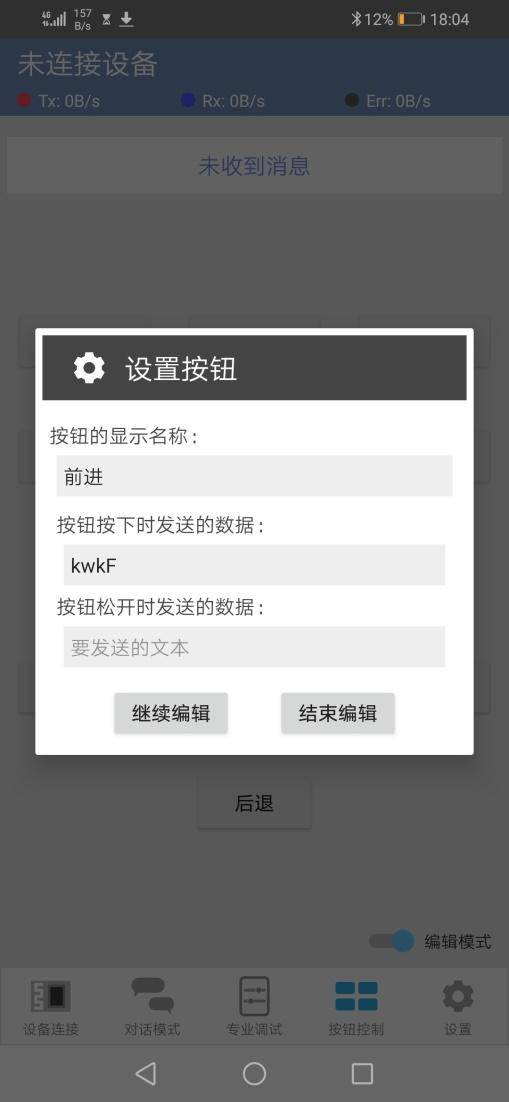
完成之后就可以控制小猫了。
最后
以上就是柔弱洋葱最近收集整理的关于Opencat-B——手机APP蓝牙遥控导航在这里:Arduino四足开源机器猫的全部内容,更多相关Opencat-B——手机APP蓝牙遥控导航在这里内容请搜索靠谱客的其他文章。








发表评论 取消回复