这篇文章基本是转自一片论文的,只是论文是用simulink仿真实现,而这里的使用代码实现,并且只是注重实现的方法,对理论分析并没有太多的描述。以下是论文链接,可以相互参考一下:
基于临界比例度法整定PID控制器参数的仿真研究
这篇的内容与上两篇是有一定联系的,也可以参考一下之前两篇加强理解:
- 用matlab的编程法和游动鼠标法求二阶传递函数的上升时间、峰值时间、超调量和调节时间
- PID算法模型分析:基于温度控制
问题:
某系统的开环传递函数?0 (?)=1/(?(?+2)(?+4)),试采用临界比例度计算系统的P、PI、PID控制器的参数,并绘制整定后的单位阶跃响应曲线。将阶跃响应曲线导入到MATLAB的工作空间中,在命令窗口绘制该系统的阶跃响应曲线。
临界比例度法:
已知传递函数,用纯比例调节控制系统,调节比例度,得到系统等幅振荡的曲线后,即可的到此时的临界比例度 δK 和临界振荡周期 TK,其中:
δK: 即此时比例度。
TK: 相邻两个波峰之间的时间间隔。
注意:只有三阶及三阶以上系统才有可能产生临界振荡,才能使用此方法获取以上参数。
步骤:
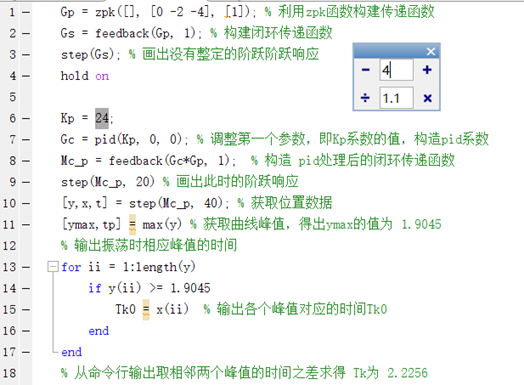
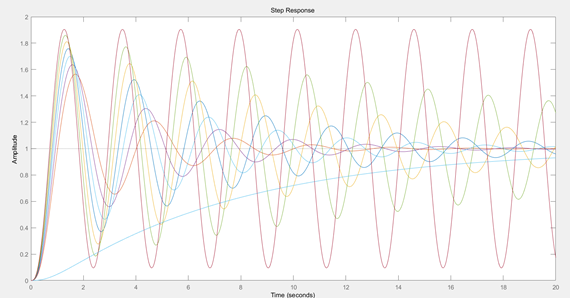
- 构造函数,经过初步调节将Kp的值设为24,开始按照4的步长增加Kp的值,得到Kp等于48时,出现等幅振荡,并可计算得到 Tk 为2.2256,如下两图:
2. 有得到的数据并根据下表方法可以得到相应的参数:
| 控制方法 | Kp | Ki | Kd |
|---|---|---|---|
| P控制 | δK / 2 | ||
| PI控制 | δK / 2.2 | Kp / (0.833 × TK) | |
| PID控制 | δK / 1.7 | Kp / (0.5 × TK) | 0.125 × TK × Kp |
并构建函数如下:

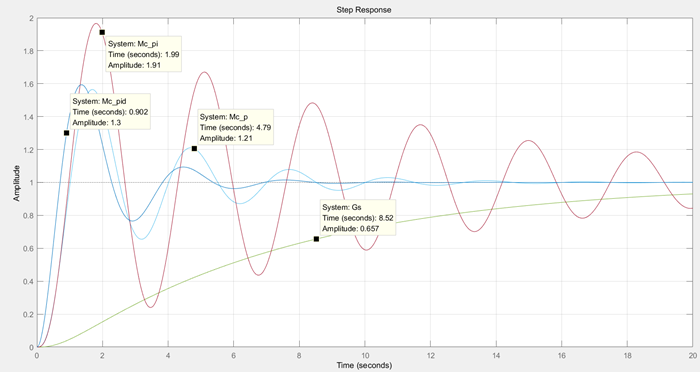
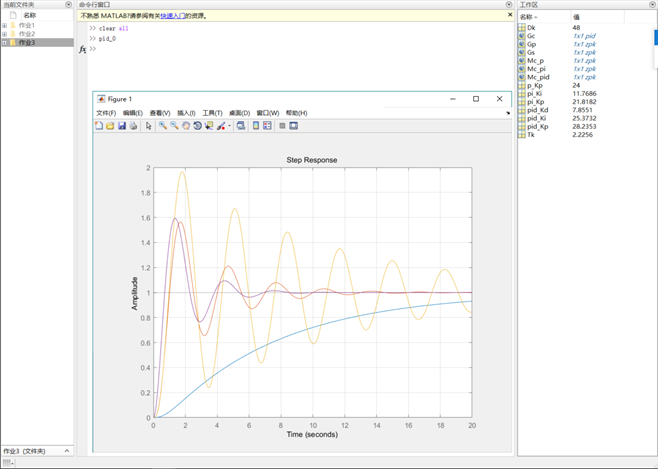
运行可得如下三种情况的阶跃响应图像(曲线中标的点只是用来标识曲线的名字,没有其他特殊的含义),可见,虽然三种调节都有超调量,但是PID调节得到的系统性能参数最好,也就是说,PID调节是最理想的:
添加到工作空间,并在命令行窗口绘制阶跃响应图像
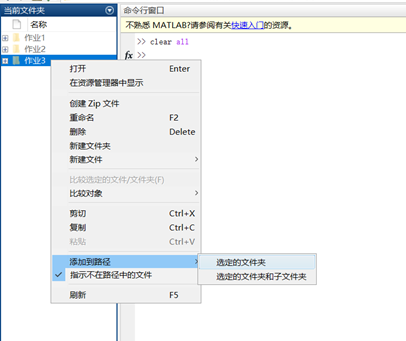
如下图,我的文件是在作业3中,所以右键-添加到路径-选定的文件夹:
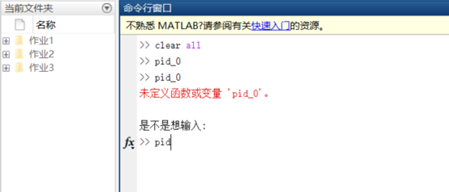
然后便可以在命令行中输入文件名运行代码了,我的文件名是pid_0.m,所以输入如下:
如果以相同的方法从工作空间移除后会出现以下错误:
>>> 完 <<<
最后
以上就是神勇裙子最近收集整理的关于临界比例度法整定P、PI、PID控制器的参数的matlab算法实现 - Gavin_Hall的博客 - CSDN博客的全部内容,更多相关临界比例度法整定P、PI、PID控制器的参数的matlab算法实现内容请搜索靠谱客的其他文章。








发表评论 取消回复