持续更新中…
雷达原理知识点汇总
第一章 绪论
1、雷达概念(Radar):
radar的音译,“Radio Detection and Ranging ”的缩写。原意是“无线电探测和测距”,即用无线电方法发现目标并测定它们在空间的位置。
2、雷达工作原理:
发射机在定时器控制下,产生高频大功率的脉冲串,通过收发开关到达定向天线,以电磁波形式向外辐射。在天线控制设备的控制下,天线波束按照指定方向在空间扫描,当电磁波照射到目标上,二次散射电磁波的一部分到达雷达天线,经收发开关至接收机,进行放大、混频和检波处理后,送到雷达终端设备,能判断目标的存在、方位、距离、速度等。
3、雷达的任务:
利用目标对电磁波的反射来发现目标并对目标进行定位。随着雷达技术的发展,雷达的任务不仅仅是测量目标的距离、方位和仰角,而且还包括测量目标的速度,以及从目标回波中获取更多有关目标的信息。
4、从雷达回波中可以提取目标的哪些有用信息,通过什么方式获取这些信息?
斜距R : 雷达到目标的直线距离OP。
方位角α: 目标斜距R在水平面上的投影OB与某一起始方向(正北、正南或其它参考方向)在水平面上的夹角。
俯仰角β:斜距R与它在水平面上的投影OB在铅垂面上的夹角,有时也称为倾角或高低角。
5、雷达工作方式
连续波和脉冲波
6、雷达测距原理
R=(C∆t)/2
式中,R为目标到雷达的单程距离,∆t为电磁波往返于目标与雷达之间的时间间隔,C为电磁波的传播速率(3×108米/秒)
7、影响雷达性能指标
脉冲宽度(窄),天线尺寸(大),波束(窄),方向性。
8、距离测量分辨力
两个目标在距离方向上的最小可区分距离:
Δrc=c/2(τ+d/υn)
∆
r
c
=
c
/
2
(
τ
+
d
/
υ
n
)
或者
Δrc=c/2∙1/B
∆
r
c
=
c
/
2
∙
1
/
B
其中,d为光点直径,
υn
υ
n
为光点扫面速度;B为有效相关带宽。
9、雷达由哪几个主要部分,各部分的功能是什么?
同步设备:雷达整机工作的频率和时间标准。
发射机:产生大功率射频脉冲。
收发转换开关: 收发共用一副天线必需,完成天线与发射机和接收机连通之间的切换。
天线:将发射信号向空间定向辐射,并接收目标回波。
接收机:把回波信号放大,检波后用于目标检测、显示或其它雷达信号处理。
显示器:显示目标回波,指示目标位置。
天线控制(伺服)装置:控制天线波束在空间扫描。
10、什么是多普勒频移?
当目标与雷达站之间存在相对速度时,接收到回波信号的载频相对于发射信号的载频产生一个频移。
第二章 发射机
1、雷达发射机的任务
产生大功率的特定调制的电磁振荡信号,即射频信号。
2、雷达发射机的主要质量指标
工作频率或波段、输出功率、总效率、信号形式、信号稳定度。
3、雷达发射机的分类
单级振荡式、主振放大式
4、单级振荡式组成及优缺点
组成:定时器、脉冲调制器、大功率射频振荡器。
优点:简单、廉价、高效;
缺点:难以产生复杂调制,频率稳定性差,脉冲间不相干。
5、主振放大式组成
组成:定时器、脉冲调制器、主控振荡器(固体微波源)、射频放大链(中间射频功率放大器、输出射频功率放大器)。
优点:复杂波形,稳定度高,相干处理;
缺点:系统复杂、昂贵。
6、发射机质量指标:
(1)工作频率(波段)
(2)输出功率:影响威力和抗干扰能力。峰值功率(脉冲期间射频振荡的平均功率)和平均功率(脉冲重复周期内输出功率的平均值)。
(3)总效率:发射机的输出平均功率与输入发射机的总平均功率的比值Pt/P。
(4)调制形式:调制器的脉冲宽度,重复频率,波形。
(5)信号稳定度/频谱纯度,即信号各项参数。
7、脉冲调制器的组成
(1)直流电源:提供充足、稳定的直流能量,满足工作要求;
(2)充电元件:将直流能量及时传递给储能元件;
(3)储能元件:在开关截止时保存充电能量,在开关导通时释放保存的能量;
(4)调制开关:刚性 在输入脉冲的作用下,脉冲期间导通,间歇期间截止软性 在输入触发的作用下,导通释放能量,放尽后自然截止;
(5)耦合元件:将高压、大电流脉冲作用到射频负载上。
8、 调制器任务与作用
为发射机的射频各级提供合适脉冲,将一个信号载到一个比它高的信号上。
9、 调制开关分类及特点
分为刚性开关和软性开关,刚性开关的电容储能部分放电式调制器,特点为部分放电,通电利索;软性开关的人工线性调制器,特点为完全放电,效率高,功率大。
第三章 接收机
1、 接收机的任务
通过适当的滤波将天线接收到的微弱高频信号从伴随的噪声和干扰中选择出来,并经过放大和检波后,送至显示器、信号处理器或由计算机控制的雷达终端设备中。
2、 超外差接收机概念
将接收信号与本机振荡电路的振荡频率,经混频后得到一个中频信号,这称为外差式接收。得到的中频信号再经中频放大器放大的,称为超外差式。中频信号经检波后得到视频信号。
3、接收机主要组成部分
高频部分:T/R开关、接收机保护器、低噪声高放、混频器、本振、自动频率控制。
中频部分:匹配滤波,自动增益控制、灵敏度时间控制。
视频部分:检波、放大。
4、接收机主要质量指标
灵敏度Simin、接收机的工作频带宽度、动态范围、中频的选择和滤波特性、工作稳定度和频率稳定度、抗干扰能力、微电子化和模块化结构
5、 收发软换开关工作原理
脉冲雷达天线收发共用,需要一个收发软换开关TR,发射时,TR使天线与发射机接通,与接收机断开,以免高功率发射信号进入接收机使之烧毁;接收时,天线与接收机接通,与发射机断开,以免因发射机旁路而使微弱接收信号受损。
6、收发开关组成及类型
高频传输线,气体放电管。分为分支线型和平衡式。
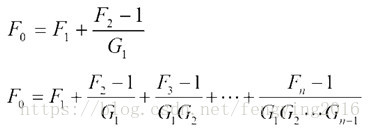
7、接收机的噪声系数
(1)噪声系数、噪声温度的定义
噪声系数:接收机输入端信号噪声比和输出端信号噪声比的比值。实际接收机输出的额定噪声功率与“理想接收机”输出的额定噪声功率之比。
噪声温度:温度Te称为“等效噪声温度”或简称“噪声温度”, 此时接收机就变成没有内部噪声的“理想接收机”
(2)级联电路的噪声系数
两级电路级联时接收机总噪声系数:
(3)噪声系数、噪声温度的计算
噪声系数:
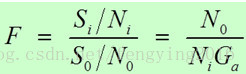
式中,
Si
S
i
为输入额定信号功率;
Ni
N
i
为输入额定噪声功率(Ni =kT0Bn);
So
S
o
为输出额定信号功率;
No
N
o
为输出额定噪声功率。
噪声温度:NA=kTABn
8、 匹配滤波
高斯白噪声背景下,使输出信噪比达到最大化的最优滤波器是匹配滤波器。
9、自动增益控制方式
(1)自动增益控制(AGC):跟踪雷达中获得归一化角误差信号。
(2)瞬时自动增益控制(IAGC):防止等幅波干扰、宽脉冲干扰和低频调幅波干扰等引起的中频放大器过载。
(3)近程增益控制(STC):防止近程杂波干扰引起的中频放大器过载。
第四章 雷达终端显示
1、 雷达终端显示器的的任务
雷达终端显示器用来显示雷达所获得的目标信息和情报,包括目标的位置及其运动情况,目标的各种特征参数等。
2、显示器的主要类型
距离显示器、平面显示器、高度显示器、情况显示器和综合显示器、光栅扫描显示器。
3、显示器列举
距离(A型 J型 A/R型)、平面(PPI)、高度(E式 RHI)
4、A型显示器组成
扫掠形成电路,视频放大电路,距标形成电路。
5、距离显示器和平面位置显示器
距离显示器是一维空间显示器,显示目标的斜距坐标。用光点在荧光屏上偏转的幅度来表示目标回波的大小。属于偏转调制显示器。
平面显示器是二维显示器,显示目标的斜距和方位两个坐标。采用平面上的亮点位置来表示目标的坐标,属于亮度调制显示器。
第五章 雷达作用距离(重点)
1、雷达方程
公式:
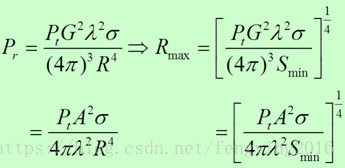
雷达方程中的不确定量:设备的实际损耗和环境因素;目标的雷达散射截面积σ;最小可检测信号功率Smin。
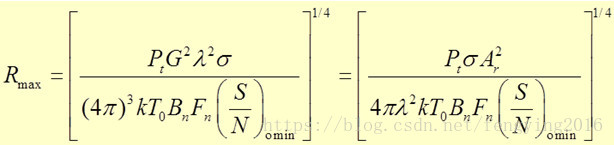
2、最小可检测信号
3、 门限检测
纽曼-皮尔逊准则:在给定信噪比条件下,满足一定虚警概率,使发现概率最大。
4、发现概率和虚警概率与门限电平的关系
(1)虚警概率(门限)一定时,信噪比越大,发现概率越大。
(2)信噪比一定时,虚警概率越小,发现概率越小;虚警概率越大,发现概率越大。
(3)检测概率为50%时对应的信噪比仍然较高。信噪比对发现概率的影响较大。
(4)当检测概率较高时,检测所要求的信噪比对虚警时间的依赖关系不灵敏。
5、 脉冲积累对信噪比的影响
检波前积累(相参积累):M个等幅相参脉冲积累可以使信噪比提高为原来的M倍。
检波后积累(非相参积累,视频积累): M个等幅脉冲积累可以使信噪比改善M-M1/2。
第六章 目标距离测量
1、 目标距离测量的方法有哪些
脉冲法测距、调频法测距
2、脉冲法测距
人工测距(早期雷达):在显示器画面上根据扫掠量程和回波脉冲位置直接测距。
自动测距(现代雷达):采用电子设备自动地测读回波到达的延迟时间。类似于距离坐标的录取设备。
3、影响测距精度因素
发射机功率,天线尺寸,目标有效截面积;电波传输速度变化产生的误差,因大气折射产生的误差,测读方法误差。
4、 自动距离跟踪
电移动指标自动地跟踪目标回波并连续地给出目标距离数据。
整个自动测距系统应包括对目标的搜索, 捕获和自动跟踪三个互相联系的部分。
第七章 角度测量
1、 测角的物理基础
电波直线传播、天线的方向性
2、测角的方法
(1)振幅法:利用天线收到的回波信号的幅度值。
最大信号法:收到回波最强的方向为目标方向;
等信号法:测角采用两个相同且彼此部分重叠的波束,通过比较两个波束回波的强弱判断目标偏离等信号轴的方向和角度。
(2)相位法:利用多个天线所接收回波之间的相位差进行测角。
3、天线波束扫描的方法
(1)电扫描(相位扫描法、频率扫描法、时间延迟法):
无惯性限制、扫描速度快,波束控制灵活; 扫描过程中波束展宽,天线增益减小,扫描角度范围有限;天线系统复杂。
(2)机械扫描:
简单、机械运动惯性大。扫描速度不高
4、 相位法测角
(1)利用多天线所接收回波信号之间的相位差来测角(2)相位差=(2pai/波长)•dsin角度,d为两天线间距,测相位差得角度(3)两天线所获高频信号经与本振信号差频后,在中频段比相。
5、相位扫描法的特点
(1)栅瓣问题如何解决
(2)波束宽度有何特点
随着扫描角度增大,波束展宽,天线增益下降。
同相馈电阵列天线有效长度
Ndcosθ0
N
d
c
o
s
θ
0
,相比法线方向减小。
第八章 运动目标检测及测速
1、 多普勒频率的概念
定义:发射源和接收者之间有相对径向运动时,接收的信号频率会发生变化。
窄带信号的多普勒效应:
多普勒频率的特征:处于音频范围,正负取决于目标接近还是远离雷达。
采用差拍的方法提取多普勒频率:
fd=fr−ft
f
d
=
f
r
−
f
t
.
2、盲速、频闪
当雷达处于脉冲工作状态时,会出现盲速和频闪。
盲速:目标有一定的径向速度,但若其回波信号经过相位检波后,输出为一串等幅脉冲,即与固定目标回波相同,此时的目标速度成为盲速。
频闪:相位检波器输出的回波信号包络调制频率与目标径向速度不再保持正比关系,此时将产生测速模糊。
产生盲速和频闪效应的原因:脉冲工作状态是对连续发射的取样,取样后的波形和频谱都发生了变化
3、 盲相
由相位检波器特性所引起。点盲相:如果相邻两个回波脉冲的相位差虽不同,但却是一对相检器输出相等工作点,经相消器后出现。连续盲相:接收机的限幅作用使动目标和固定杂波的合成矢量变成断点在限幅电平的一小段圆弧上来回摆动的矢量,相消器几乎无输出。
4、 动目标显示雷达的工作原理
对消静止目标原理:在相位检波器的输入端加上基准电压(或称相参电压), 该电压应和发射信号频率相参并保存发射信号的初相, 且在整个接收信号期间连续存在。回波信号与基准电压比较相位,从相位检波器输出视频脉冲, 有固定目标的等幅脉冲串和运动目标的调幅脉冲串。在送到终端(显示器或数据处理系统)去之前需要采用相消设备或杂波滤波器,将固定杂波消去, 而保存运动目标信息。
5、动目标显示雷达的改善因子(定义)
改善因子(I, Improvement factor),动目标显示系统输出的信号杂波输出功率比和输入信号杂波功率比的比值。
最后
以上就是玩命紫菜最近收集整理的关于雷达原理 知识点汇总的全部内容,更多相关雷达原理内容请搜索靠谱客的其他文章。








发表评论 取消回复