文章目录
- 一、创建多体模型
- 二、创建模型准备工作
- 三、创建单连杆模型
- 1.教程概述
- 2.建立模型
- 3.生成子系统
- 4.模型可视化
一、创建多体模型
- 步骤一:研究模型的系统。确定要在模型中合并的相关主体、关节和约束条件。考虑作用于物体之间或直接作用在关节处的力和扭矩。
- 步骤二:对实体建模。指定各实体的属性。 将坐标系添加到实体,以便可以连接关节和约束、施加力和扭矩以及感知运动。
- 步骤三:组装多体系统。通过关节成对地连接实体。通过齿轮和其他运动学约束来约束实体的运动。
- 步骤四:指定并感知动态变量。模拟外部载荷、实体之间的相互作用和联合驱动输入。感知力、力矩和运动变量作为时间的函数。
二、创建模型准备工作
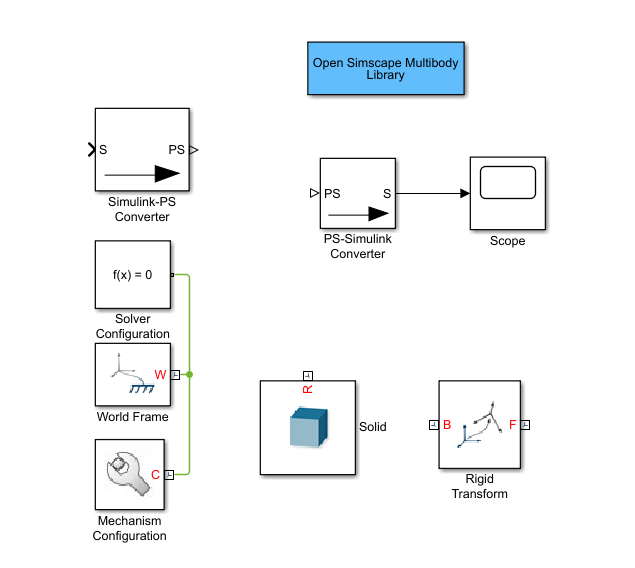
可以直接通过在MATLAB命令提示符中输入smnew,启动一个新的Simscape Multibody模型。smnew函数打开一个带有常用模块和最佳性能的变步长自动求解器的Simscape Multibody模型模板。下图显示了该模板。
>>smnew
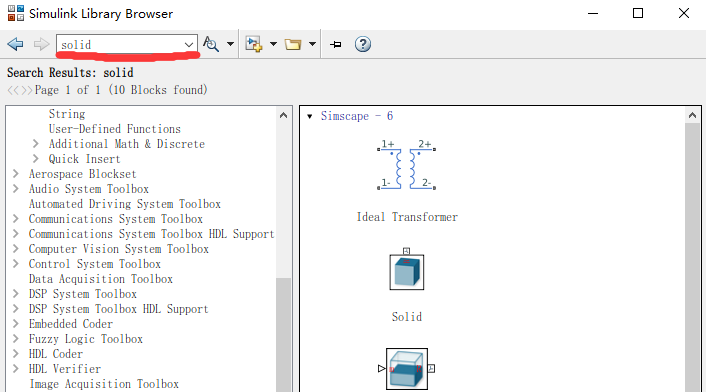
还可以通过直接在MATLAB命令提示符中输入sm_lib打开Simscape Multibody模块库。浏览该模块库来给你的模型选择所需的模块。或者,在Simulink Model window中输入模块名,并从搜索结果中选择匹配项。
>>sm_lib
三、创建单连杆模型
1.教程概述
机械连杆是连杆、机械机构和机器中的常见构件。单摆是一个仅有一根连杆的例子。将建模一个带有两个末端坐标系的单连杆,后面将其连接到关节上。Rigid Transform模块提供末端坐标系,而Solid模块提供几何图形、惯性和颜色。为简单起见,该模型假设连杆为长方体。
2.建立模型
-
在MATLAB命令提示符中输入smnew,打开Simscape Multibody模块库和具有常用模块的模板。
-
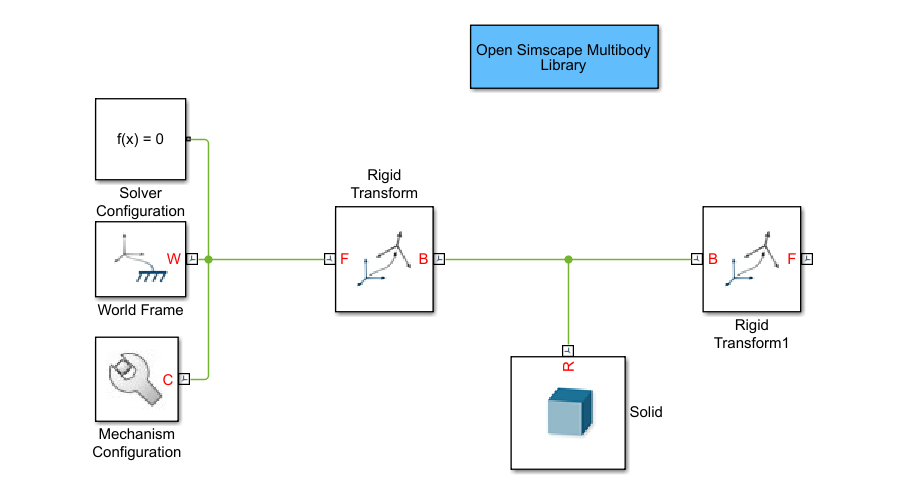
复制一个 Rigid Transform模块,并将其粘贴到模型中。使用Rigid
Transform模块可以创建新坐标系,在多体模型装配时用来连接关节。 -
根据模型需要,选择删除 Simulink-PS Converter, PS-Simulink Converter,和 Scope这些模块。
-
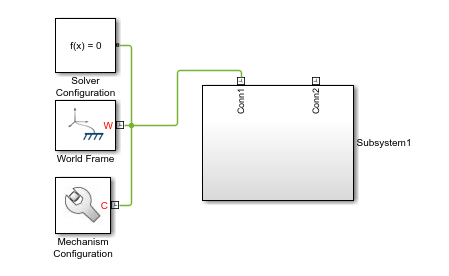
按照图中所示连接其余的块。确保 Rigid Transform模块的基础坐标系(B)口都连向Solid模块坐标系(R)接口。由于每个Rigid Transform模块都对其坐标系应用空间变换,因此交换接口连接会改变两坐标系的空间关系。
-
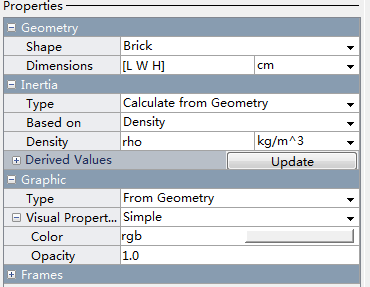
在Solid对话框中,指定以下参数。稍后,将使用包含Solid和 Rigid
Transform的子系统块来定义所显示的MATLAB变量。其优点是,该方法从一处更新在多个模块中使用的变量。
-
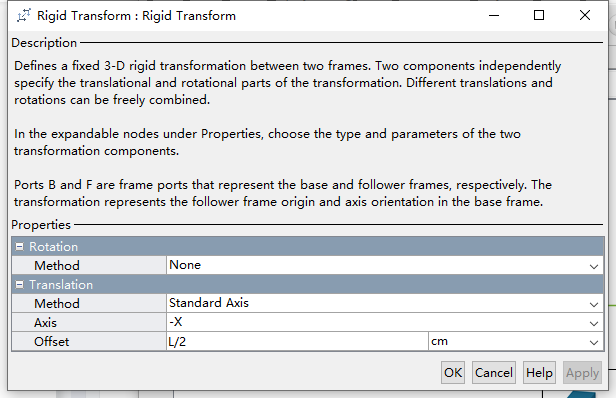
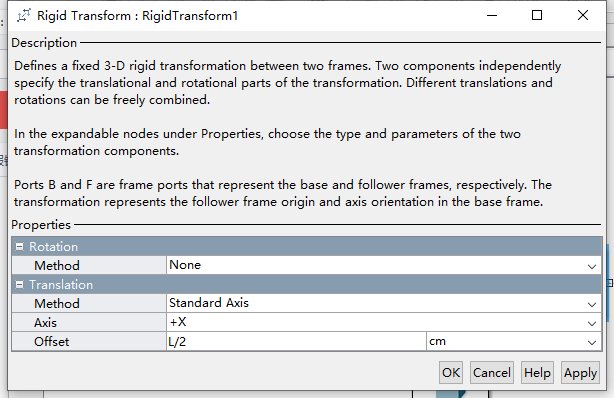
在 Rigid Transform 和 Rigid Transform1 模块的对话框中,指定以下参数。 这些参数指,相对于Solid参考坐标系, Rigid Transform模块的B和F坐标系之间的偏移。
3.生成子系统
- 选择Solid模块和两个Rigid Transform模块。
- 右键单击高亮显示的区域,然后选择“从选择中创建子系统”。Simulink添加了一个新的子系统块,其中包含Solid和Rigid Transform。
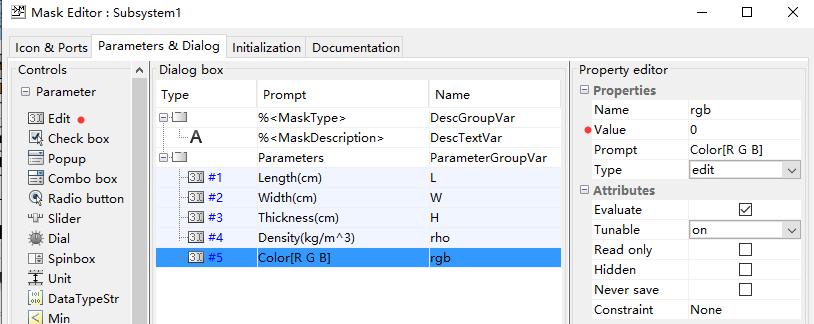
- 右键子系统模块,然后选择 Mask > Create Mask。将打开一个编辑器,能够指定在实体和刚性变换块对话框中输入的MATLAB变量的数值。
- 在Parameters & Dialog选项卡中,向Parameters文件夹添加5个edit。在edit中,指定以下参数并单击OK。 Prompt是子系统块对话框中每个参数所需的文本。 Name是与每个子系统块参数相关联的MATLAB变量。
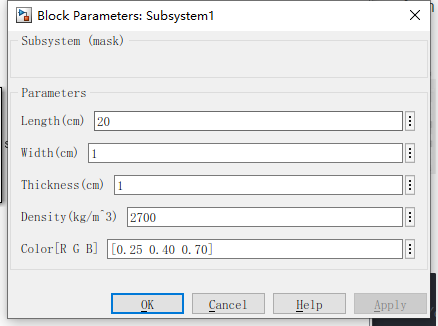
- 双击子系统块对话框,并输入以下数值。这些是在Solid和Rigid Transform对话框中输入的MATLAB变量的值。
- 设置完参数后,再双击子系统模块,可以发现之前设置的五个参数的数值均已被设置好。
4.模型可视化
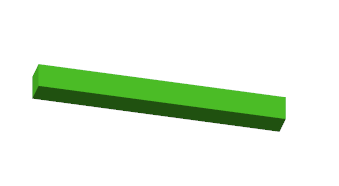
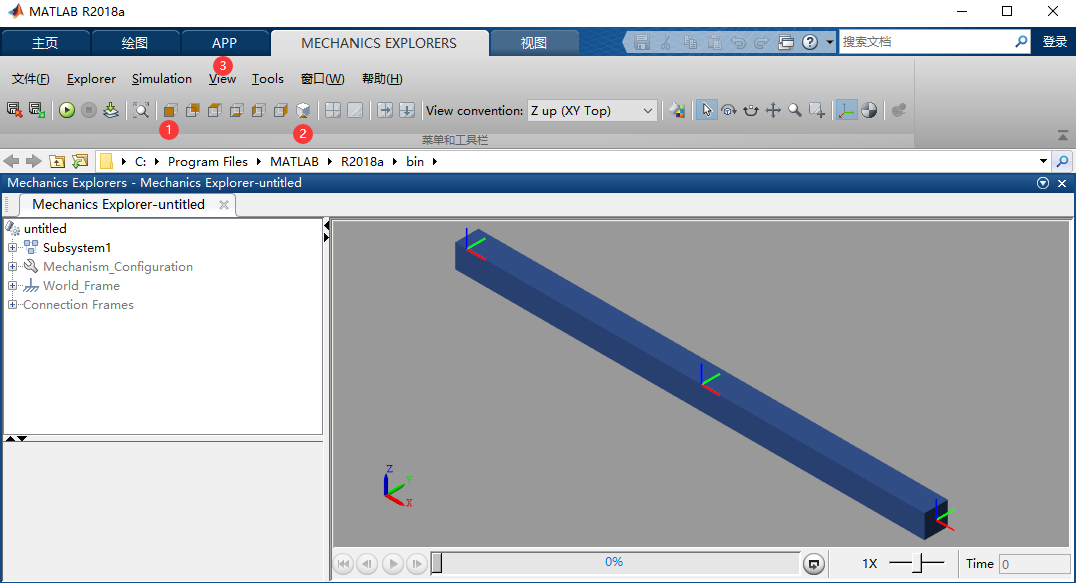
更新模块。在Simulink菜单栏中选择Simulation > Update Diagram。在Mechanics Explorer窗口下选择单连杆模型的前视图,选择等距视图按钮以获得如下图所示的三维视图。要查看模型中显示的坐标系,包括使用Rigid Transform创建的坐标系,在Mechanics Explorer菜单栏中 View > Show
Frames。
最后
以上就是可爱洋葱最近收集整理的关于Simscape入门指南2-单连杆一、创建多体模型二、创建模型准备工作三、创建单连杆模型的全部内容,更多相关Simscape入门指南2-单连杆一、创建多体模型二、创建模型准备工作三、创建单连杆模型内容请搜索靠谱客的其他文章。








发表评论 取消回复