以前在本科时写的教程文章,主要是把自己当时参赛的方法拿出来做了个总结。
想当年天天水论坛好为人师,现在已经全面转向计算机视觉方向了,颇为感慨。不过,自己的理性选择,个中得失早就意料之中。塞翁失马,焉知非福?
原文链接:http://www.openedv.com/forum.php?mod=viewthread&tid=82594&extra=
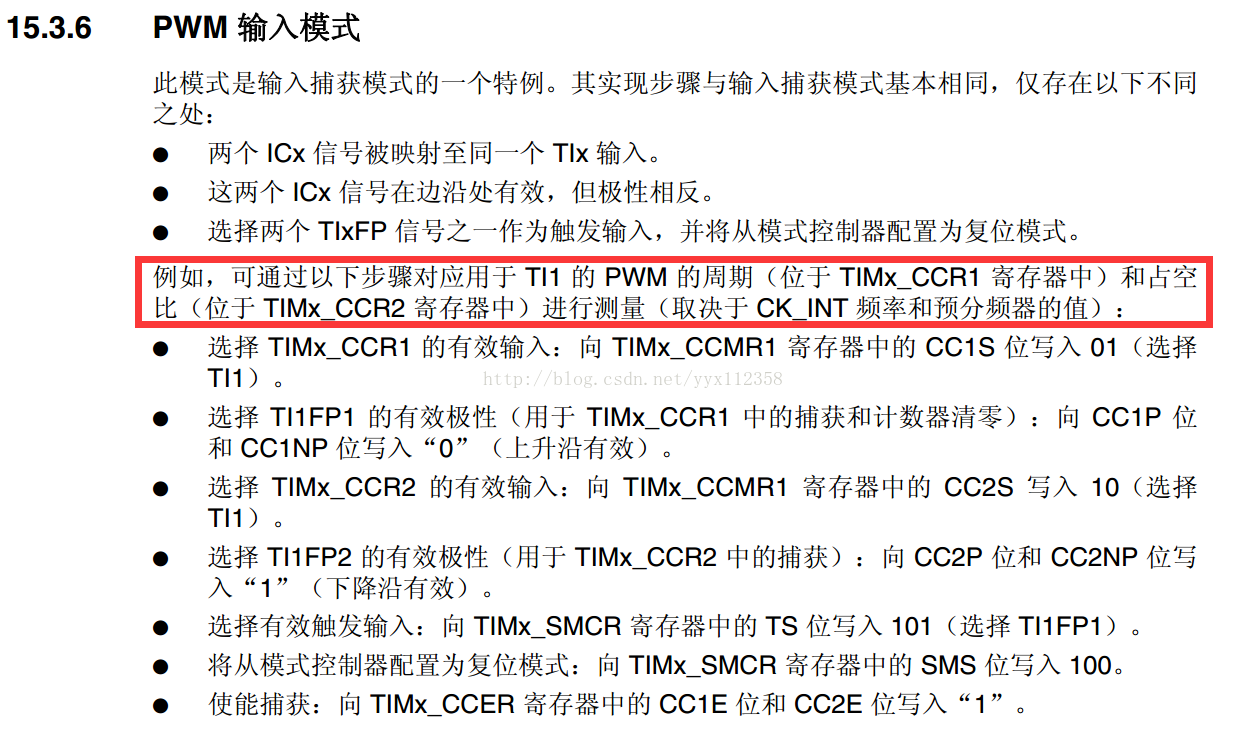
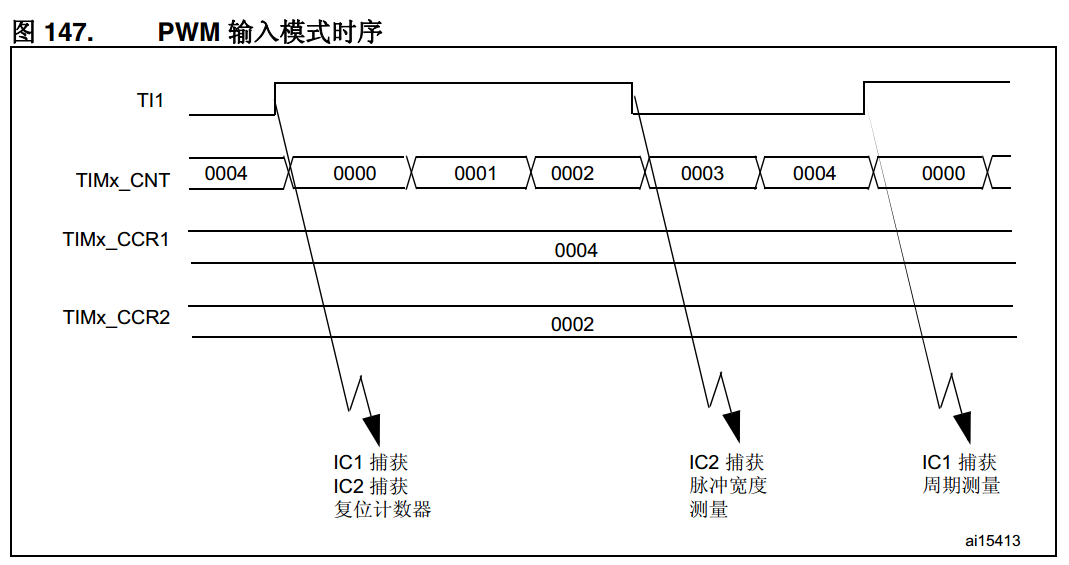
【教程】使用STM32测量频率和占空比的几种方法(申请置酷!)
void Tim2_PWMIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
/* TIM4 clock enable */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
/* GPIOB clock enable */
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
/* TIM4 chennel2 configuration : PB.07 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP ;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/* Connect TIM pin to AF2 */
GPIO_PinAFConfig(GPIOB, GPIO_PinSource7, GPIO_AF_TIM4);
/* Enable the TIM4 global Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0x0;
TIM_PWMIConfig(TIM4, &TIM_ICInitStructure);
/* Select the TIM4 Input Trigger: TI2FP2 */
TIM_SelectInputTrigger(TIM4, TIM_TS_TI2FP2);
/* Select the slave Mode: Reset Mode */
TIM_SelectSlaveMode(TIM4, TIM_SlaveMode_Reset);
TIM_SelectMasterSlaveMode(TIM4,TIM_MasterSlaveMode_Enable);
/* TIM enable counter */
TIM_Cmd(TIM4, ENABLE);
/* Enable the CC2 Interrupt Request */
TIM_ITConfig(TIM4, TIM_IT_CC2, ENABLE);
}
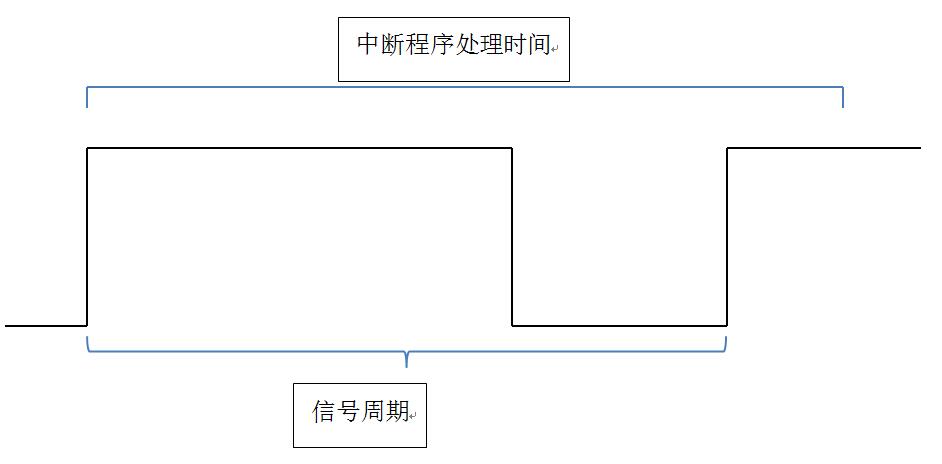
//中断程序:
void TIM4_IRQHandler(void)
{
/* Clear TIM4 Capture compare interrupt pending bit */
TIM_ClearITPendingBit(TIM4, TIM_IT_CC1|TIM_IT_CC2);
/* Get the Input Capture value */
IC2Value = TIM_GetCapture2(TIM4);//周期
if (IC2Value != 0)
{
highval[filter_cnt]=TIM_GetCapture1(TIM4);//高电平周期
waveval[filter_cnt]=IC2Value;
filter_cnt++;
if(filter_cnt>=FILTER_NUM)
filter_cnt=0;
}
else
{
DutyCycle = 0;
Frequency = 0;
}
}
//主循环:
while (1)
{
uint32_t highsum=0,wavesum=0,dutysum=0,freqsum=0;
LCD_Clear(0);
for(i=0;i<FILTER_NUM;i++)
{
highsum+=highval[i];
wavesum+=waveval;
}
[/i] delay_ms(1);
DutyCycle=highsum*1000/wavesum;
Frequency=(SystemCoreClock/2*1000/wavesum);
freq=Frequency*2.2118-47.05;//线性补偿
sprintf(str,"DUTY:%3dnFREQ:%.3f KHZn",DutyCycle,freq/1000);
LCD_ShowString(0,200,str);
delay_ms(100);
}
//定时器5通道1输入捕获配置
//arr:自动重装值(TIM2,TIM5是32位的!!)
//psc:时钟预分频数
void TIM5_CH1_Cap_Init(u32 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5,ENABLE); //TIM5时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); //使能PORTA时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIOA0
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN; //下拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA0
GPIO_PinAFConfig(GPIOA,GPIO_PinSource0,GPIO_AF_TIM5); //PA0复用位定时器5
TIM_TimeBaseStructure.TIM_Prescaler=psc; //定时器分频
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseStructure.TIM_Period=arr; //自动重装载值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM5,&TIM_TimeBaseStructure);
//初始化TIM5输入捕获参数
TIM5_ICInitStructure.TIM_Channel = TIM_Channel_1; //CC1S=01 选择输入端 IC1映射到TI1上
TIM5_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获
TIM5_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到TI1上
TIM5_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频
TIM5_ICInitStructure.TIM_ICFilter = 0x00;//IC1F=0000 配置输入滤波器 不滤波
TIM_ICInit(TIM5, &TIM5_ICInitStructure);
TIM_ITConfig(TIM5,TIM_IT_Update|TIM_IT_CC1,ENABLE);//允许更新中断 ,允许CC1IE捕获中断
TIM_Cmd(TIM5,ENABLE ); //使能定时器5
NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2;//抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority =0; //子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、
}
//捕获状态(对于32位定时器来说,1us计数器加1,溢出时间:4294秒)
//定时器5中断服务程序
void TIM5_IRQHandler(void)
{
if(TIM_GetITStatus(TIM5, TIM_IT_CC1) != RESET)//捕获1发生捕获事件
{
if(edge==RESET)//上升沿
{
rising=TIM5->CCR1-rising_last;
rising_last=TIM5->CCR1;
TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Falling); //CC1P=0 设置为上升沿捕获
edge=SET;
}
else
{
falling=TIM5->CCR1-rising_last;
TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Rising); //CC1P=0 设置为上升沿捕获
edge=RESET;
}
}
TIM_ClearITPendingBit(TIM5, TIM_IT_CC1|TIM_IT_Update); //清除中断标志位
}
主程序:
while (1)
{
uint32_t highsum=0,wavesum=0,dutysum=0,freqsum=0;
LCD_Clear(0);
delay_ms(1);
sprintf(str,"rise:%3dnfall:%dnfall-rise:%d",rising,falling,falling-rising);
LCD_ShowString(0,100,str);
sprintf(str,"Freq:%.2f HznDuty:%.3fn",90000000.0/rising,(float)falling/(float)rising);//频率、占空比
LCD_ShowString(0,200,str);
delay_ms(100);
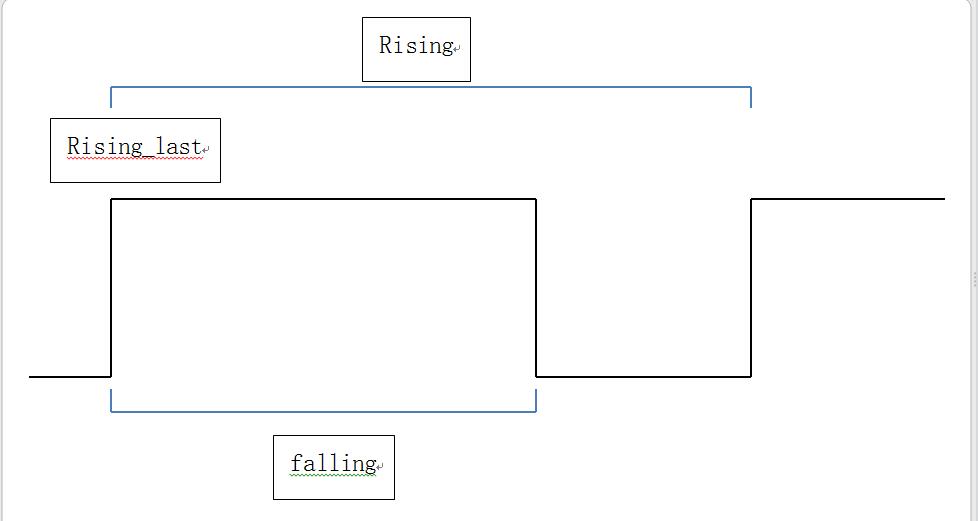
}注意的是,中断程序当中的变量rising,last因为多次修改的缘故,与名称本身含义有所区别,示意如下:
/TIM2_CH1->PA5
//TIM2_CH2->PB3
void TIM2_CH1_Cap_Init(u32 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
TIM_DeInit(TIM2);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //TIM2时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA|RCC_AHB1Periph_GPIOB, ENABLE); //使能PORTA时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //GPIOA0
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_25MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN; //下拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA0
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; //GPIOA0
GPIO_Init(GPIOB,&GPIO_InitStructure); //初始化PA0
GPIO_PinAFConfig(GPIOA,GPIO_PinSource5,GPIO_AF_TIM2); //PA0复用位定时器5
GPIO_PinAFConfig(GPIOB,GPIO_PinSource3,GPIO_AF_TIM2); //PA0复用位定时器5
TIM_TimeBaseStructure.TIM_Prescaler=psc; //定时器分频
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseStructure.TIM_Period=arr; //自动重装载值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseStructure);
//初始化TIM2输入捕获参数
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //CC1S=01 选择输入端 IC1映射到TI1上
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到TI1上
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频
TIM_ICInitStructure.TIM_ICFilter = 0x00;//IC1F=0000 配置输入滤波器 不滤波
TIM_ICInit(TIM2, &TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2; //CC1S=01 选择输入端 IC1映射到TI1上
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Falling; //上升沿捕获
TIM_ICInit(TIM2, &TIM_ICInitStructure);
TIM_ITConfig(TIM2,TIM_IT_Update|TIM_IT_CC1|TIM_IT_CC2,ENABLE);//允许更新中断 ,允许CC1IE捕获中断
// TIM2_CH1_Cap_DMAInit();
TIM_Cmd(TIM2,ENABLE ); //使能定时器5
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =0; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、
}
//定时器2中断服务程序(对于32位定时器来说,1us计数器加1,溢出时间:4294秒)
void TIM2_IRQHandler(void)
{
if(TIM2->SR&TIM_FLAG_CC1)//TIM_GetITStatus(TIM2, TIM_IT_CC1) != RESET)//捕获1发生捕获事件
{
rising=TIM2->CCR1-rising_last;
rising_last=TIM2->CCR1;
return;
}
if(TIM2->SR&TIM_FLAG_CC2)//TIM_GetITStatus(TIM2, TIM_IT_CC2) != RESET)
{
falling=TIM2->CCR2-rising_last;
return;
}
TIM2->SR=0;
}
这样,最高频率能够达到约1.1MHz,是一个不小的进步。但是,其根本问题——中断太频繁——仍然存在。
解决思路也是存在的。本质上,我们实际上只需要读取CCR1和CCR2寄存器。而在内存复制过程中,面对大数据量的转移时,我们会想到什么?显然,我们很容易想到——利用DMA。所以,我们使用输入捕获事件触发DMA来搬运寄存器而非触发中断即可,然后将这些数据存放在一个数组当中并循环刷新。这样,我们可以随时来查看数据并计算出频率。
这一方法我曾经尝试过,没有调出来,因为,有一个更好的方法存在。但是理论上这是没有问题的,以供参考我列出如下。
【注意:这段程序无法工作,仅供参考!!!】
//TIM2_CH1->DMA1_CHANNEL3_STREAM5
u32 val[FILTER_NUM]={0};
void TIM2_CH1_Cap_DMAInit(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
DMA_InitTypeDef DMA_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_DMA1,ENABLE);//DMA1时钟使能
DMA_DeInit(DMA1_Stream5);
while (DMA_GetCmdStatus(DMA1_Stream5) != DISABLE){}//等待DMA可配置
/* 配置 DMA Stream */
DMA_InitStructure.DMA_Channel = DMA_Channel_3; //通道选择
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&(TIM5->CCR1);//DMA外设地址
DMA_InitStructure.DMA_Memory0BaseAddr = (uint32_t)val;//DMA 存储器0地址
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralToMemory;//存储器到外设模式
DMA_InitStructure.DMA_BufferSize = FILTER_NUM;//数据传输量
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;//外设非增量模式
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;//存储器增量模式
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Word;//外设数据长度:8位
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Word;//存储器数据长度:8位
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;// 使用普通模式
DMA_InitStructure.DMA_Priority = DMA_Priority_High;//中等优先级
DMA_InitStructure.DMA_FIFOMode = DMA_FIFOMode_Disable;
DMA_InitStructure.DMA_FIFOThreshold = DMA_FIFOThreshold_Full;
DMA_InitStructure.DMA_MemoryBurst = DMA_MemoryBurst_Single;//存储器突发单次传输
DMA_InitStructure.DMA_PeripheralBurst = DMA_PeripheralBurst_Single;//外设突发单次传输
DMA_Init(DMA1_Stream5, &DMA_InitStructure);//初始化DMA Stream
TIM_DMAConfig(TIM5,TIM_DMABase_CCR1,TIM_DMABurstLength_16Bytes);
TIM_DMACmd(TIM5,TIM_DMA_CC1,ENABLE);
//如果需要DMA中断则如下面所示
NVIC_InitStructure.NVIC_IRQChannel = DMA1_Stream5_IRQn; //使能TIM中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02; //抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x02; //子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能中断
NVIC_Init(&NVIC_InitStructure);
DMA_ITConfig(DMA1_Stream5,DMA_IT_TC,ENABLE);
//开启DMA传输
DMA_Cmd(DMA1_Stream5, ENABLE);
}
void DMA1_Stream5_IRQHandler(void)
{
DMA_ClearITPendingBit(DMA1_Stream5,DMA_IT_TCIF5);
}
因此,高频时仍然推荐以下方法。
思路四:使用外部时钟计数器
这种方法是我这几天回答问题时推荐的方法。思路是配置两个定时器,定时器a设置为外部时钟计数器模式,定时器b设置为定时器(比如50ms溢出一次,也可以用软件定时器),然后定时器b中断函数中统计定时器a在这段时间内的增量,简单计算即可。
代码:
//TIM7->100ms
//TIM2_CH2->PB3
void TIM_Cnt_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_DeInit(TIM2);
TIM_DeInit(TIM7);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2|RCC_APB1Periph_TIM7,ENABLE); //TIM2时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE); //使能PORTA时钟
//IO
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; //GPIOA0
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_25MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //下拉
GPIO_Init(GPIOB,&GPIO_InitStructure); //初始化PA0
GPIO_PinAFConfig(GPIOB,GPIO_PinSource3,GPIO_AF_TIM2); //PA0复用位定时器5
//TIM2配置
TIM_TimeBaseStructure.TIM_Prescaler=0; //定时器分频
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseStructure.TIM_Period=0xFFFFFFFF; //自动重装载值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseStructure);
TIM_TIxExternalClockConfig(TIM2,TIM_TIxExternalCLK1Source_TI2,TIM_ICPolarity_Rising,0);//外部时钟源
//TIM7 100ms
TIM_TimeBaseStructure.TIM_Prescaler=18000-1; //定时器分频
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseStructure.TIM_Period=1000-1; //自动重装载值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM7,&TIM_TimeBaseStructure);
//中断
NVIC_InitStructure.NVIC_IRQChannel = TIM7_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =0; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、
TIM_ITConfig(TIM7,TIM_IT_Update,ENABLE);//允许更新中断 ,允许CC1IE捕获中断
TIM_Cmd(TIM7,ENABLE ); //使能定时器5
TIM_Cmd(TIM2,ENABLE ); //使能定时器5
}
u32 TIM7_LastCnt;
//频率为TIM_ExtCntFreq
void TIM7_IRQHandler(void)
{
char str[32];
TIM_ExtCntFreq=(TIM2->CNT-TIM7_LastCnt)*(1/SAMPLE_PERIOD);// SAMPLE_PERIOD为采样周期0.1s
sprintf(str,"%3.3f",TIM_ExtCntFreq/1000.0);//必须加这一句,莫明其妙
TIM7_LastCnt=TIM2->CNT;
TIM_ClearITPendingBit(TIM7,TIM_IT_Update);
}
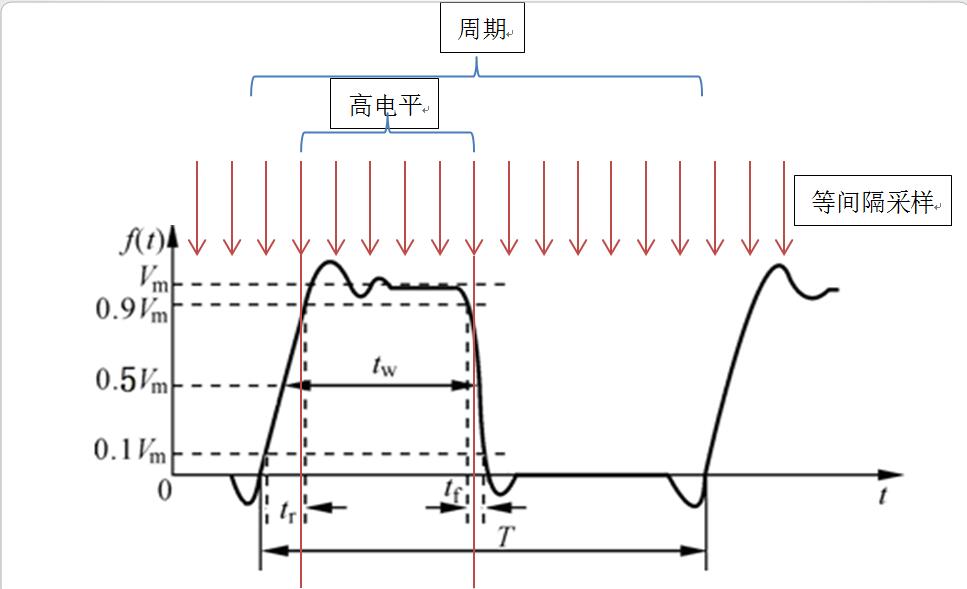
当采样数n趋于无穷时,事件A的概率即趋近于统计的频率。所以,当采样数越大,则采样到的高电平占样本总数的频率即趋近于概率——占空比!
//ADC1-CH13-PC3
//DMA2-CH0-STREAM0
#define ADCx ADC1
#define ADC_CHANNEL ADC_Channel_13
#define ADCx_CLK RCC_APB2Periph_ADC1
#define ADCx_CHANNEL_GPIO_CLK RCC_AHB1Periph_GPIOC
#define GPIO_PIN GPIO_Pin_3
#define GPIO_PORT GPIOC
#define DMA_CHANNELx DMA_Channel_0
#define DMA_STREAMx DMA2_Stream0
#define ADCx_DR_ADDRESS ((uint32_t)&(ADCx->DR))//((uint32_t)0x4001224C)
void ADC_DMAInit(void)
{
ADC_InitTypeDef ADC_InitStructure;
ADC_CommonInitTypeDef ADC_CommonInitStructure;
DMA_InitTypeDef DMA_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/* Enable ADCx, DMA and GPIO clocks ****************************************/
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_DMA2, ENABLE);
RCC_AHB1PeriphClockCmd(ADCx_CHANNEL_GPIO_CLK, ENABLE);
RCC_APB2PeriphClockCmd(ADCx_CLK, ENABLE);
/* DMA2 Stream0 channel2 configuration **************************************/
DMA_InitStructure.DMA_Channel = DMA_CHANNELx;
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)ADCx_DR_ADDRESS;
DMA_InitStructure.DMA_Memory0BaseAddr = (uint32_t)&(ADC_DATAPOOL[0]);
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralToMemory;
DMA_InitStructure.DMA_BufferSize = ADC_POOLSIZE;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
DMA_InitStructure.DMA_FIFOMode = DMA_FIFOMode_Disable;
DMA_InitStructure.DMA_FIFOThreshold = DMA_FIFOThreshold_HalfFull;
DMA_InitStructure.DMA_MemoryBurst = DMA_MemoryBurst_Single;
DMA_InitStructure.DMA_PeripheralBurst = DMA_PeripheralBurst_Single;
DMA_Init(DMA_STREAMx, &DMA_InitStructure);
DMA_Cmd(DMA_STREAMx, ENABLE);
/* Configure ADC3 Channel7 pin as analog input ******************************/
GPIO_InitStructure.GPIO_Pin = GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AN;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL ;
GPIO_Init(GPIO_PORT, &GPIO_InitStructure);
/* ADC Common Init **********************************************************/
ADC_CommonInitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_CommonInitStructure.ADC_Prescaler = ADC_Prescaler_Div2;
ADC_CommonInitStructure.ADC_DMAAccessMode = ADC_DMAAccessMode_Disabled;
ADC_CommonInitStructure.ADC_TwoSamplingDelay = ADC_TwoSamplingDelay_20Cycles;
ADC_CommonInit(&ADC_CommonInitStructure);
/* ADC3 Init ****************************************************************/
ADC_InitStructure.ADC_Resolution = ADC_Resolution_8b;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;
ADC_InitStructure.ADC_ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_None;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_T1_CC1;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfConversion = 1;
ADC_Init(ADCx, &ADC_InitStructure);
/* ADC3 regular channel7 configuration **************************************/
ADC_RegularChannelConfig(ADCx, ADC_CHANNEL, 1, ADC_SampleTime_480Cycles);
/* Enable DMA request after last transfer (Single-ADC mode) */
ADC_DMARequestAfterLastTransferCmd(ADCx, ENABLE);
/* Enable ADC3 DMA */
ADC_DMACmd(ADCx, ENABLE);
/* Enable ADC3 */
ADC_Cmd(ADCx, ENABLE);
}
主程序:
for(j=0;j<ADC_POOLSIZE;j++)
{
if(ADC_DATAPOOL[j]>0x01)
posicnt++;
}
duty=100*posicnt/(float)(ADC_POOLSIZE)+0.1f;//线性补偿
最后
以上就是缥缈蜗牛最近收集整理的关于使用 STM32 测量频率和占空比的几种方法的全部内容,更多相关使用内容请搜索靠谱客的其他文章。



![[MSP430] 2.中断和计时器](https://www.shuijiaxian.com/files_image/reation/bcimg17.png)




发表评论 取消回复