加入技术交流群
领取资料
本文介绍了运动控制终的S曲线,通过matlab和C语言实现并进行仿真;本文篇幅较长,请自备茶水;
请帮忙点个赞 ????????????;
请帮忙点个赞 ????????????;
请帮忙点个赞 ????????????;
之前有介绍过T形曲线,具体可以参考《一文教你快速搞懂速度曲线规划之T形曲线》,本文将在原先的基础上进行进一步扩展,另外由于介绍速度曲线的论文较多,本文会在具体引用的地方给出原文出处;先对比一下两者的差别;
网图侵删
文章目录
- 1 前言
- 2 理论分析
- 2.1 加速度时间关系方程
- 2.2 速度时间关系方程
- 2.3 位移时间关系方程
- 3 程序实现的思路
- 3.1 T k T_k Tk 推导
- 3.2 J J J 的推导
- 4 matlab 程序
- 5 总结
- 6 参考
1 前言
S形加减速的最重要特征是该算法的加速度/减速度曲线的形状如字母 S。S形加减速的速度曲线平滑 ,从而能够减少对控制过程中的冲击,并使插补过程具有柔性 1。
由于T形曲线在加速到匀速的切换过程中,实际中存在较大过冲,因此这里对比一下T曲线和7段S曲线的实际过程;
- T形:加速 -> 匀速 -> 减速
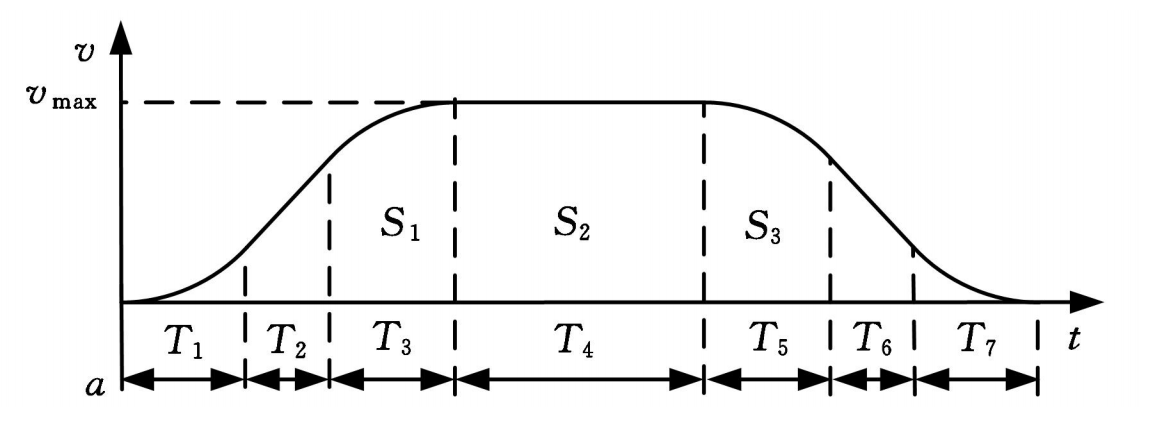
- S形:加加速( T 1 T_1 T1) -> 匀加速( T 2 T_2 T2) -> 减加速( T 3 T_3 T3)-> 匀速( T 4 T_4 T4)-> 加减速( T 5 T_5 T5)-> 匀减速( T 6 T_6 T6)-> 减减速( T 7 T_7 T7)
上文在加速这块的文字描述可能读起来起来有点绕,下面看图:
2 理论分析
由于S曲线在加减速的过程中,其加速度是变化的,因此这里引入了新的一个变量
J
J
J,即加加速度。
J
=
d
a
d
t
J = cfrac{d_a}{d_t}
J=dtda
因此对应上图的7段S速度曲线中,规定最大加速为
a
m
a
x
a_{max}
amax,最小加速度为
−
a
m
a
x
-a_{max}
−amax,则加速度的关系;
- 加加速( T 1 T_1 T1): a a a逐渐增大,此时 a = J T 1 , 0 < t ≤ t 1 ; a = JT_1,qquad 0<tle t_1; a=JT1,0<t≤t1;
- 匀加速( T 2 T_2 T2): a a a达到最大,此时 a = a m a x , t 1 < t ≤ t 2 ; a = a_{max}, qquad t_1<tle t_2; a=amax,t1<t≤t2;
- 减加速( T 3 T_3 T3): a a a逐渐减小,此时 a = a m a x − J T 3 , t 2 < t ≤ t 3 ; a = a_{max}-JT_3, qquad t_2<tle t_3; a=amax−JT3,t2<t≤t3;
- 匀速( T 4 T_4 T4): a a a不变化,此时 a = 0 , t 3 < t ≤ t 4 ; a = 0, qquad t_3<tle t_4; a=0,t3<t≤t4;
- 加减速( T 5 T_5 T5): ∣ a ∣ |a| ∣a∣ 逐渐增大,此时 a = − J T 5 , t 4 < t ≤ t 5 ; a = -JT_5, qquad t_4<tle t_5; a=−JT5,t4<t≤t5;
- 匀减速( T 6 T_6 T6): ∣ a ∣ |a| ∣a∣ 达到最大,此时 a = − a m a x , t 5 < t ≤ t 6 ; a = -a_{max}, qquad t_5<tle t_6; a=−amax,t5<t≤t6;
- 减减速( T 7 T_7 T7): ∣ a ∣ |a| ∣a∣ 逐渐减小,此时 a = − a m a x + − J T 7 , t 6 < t ≤ t 7 ; a = -a_{max}+-JT_7, qquad t_6<tle t_7; a=−amax+−JT7,t6<t≤t7;
∣ a ∣ |a| ∣a∣ 为加速度的绝对值;
其中 T k = t k − t k − 1 ( k = 1 , . . . , 7 ) T_k =t_k - t_{k -1} (k =1 , ..., 7) Tk=tk−tk−1(k=1,...,7)
所以通常需要确定三个最基本的系统参数 :系统最大速度 v m a x v_{max} vmax ,最大加速度a_{max} ,加加速度 J J J,就可以可确定整个运行过程2 ;
- 最大速度:反映了系统的最大运行能力 ;
- 最大加速度:反映了系统的最大加减速能力 ;
- 加加速度:反映了系统的柔性;
- 柔性越大,过冲越大,运行时间越短;
- 柔性越小,过冲越小,运行时间越长;
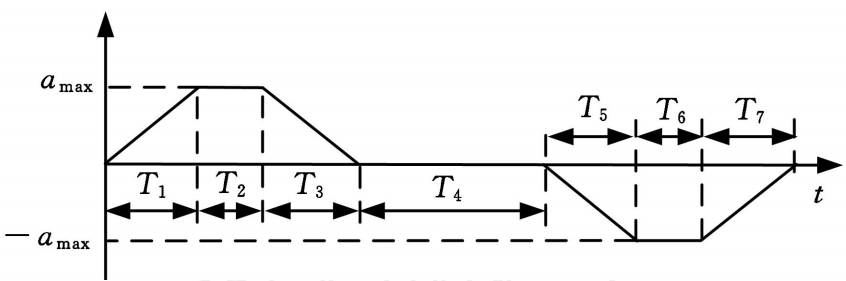
2.1 加速度时间关系方程
整个加速度变化的过程具体如下图所示;
再次强调一下
T
T
T 和
t
t
t 的关系,
T
k
=
t
k
−
t
k
−
1
(
k
=
1
,
.
.
.
,
7
)
T_k =t_k - t_{k -1} (k =1 , ..., 7)
Tk=tk−tk−1(k=1,...,7)
另外这里再引入变量
τ
tau
τ,
τ
k
=
t
−
t
k
−
1
⋯
①
tau_k = t - t_{k-1}quad cdots quad①
τk=t−tk−1⋯①
比如,当前时刻
t
2
<
t
≤
t
3
t_2<tle t_3
t2<t≤t3 ,即
t
t
t 位于区间
T
3
T_3
T3,则如果将
t
2
t_2
t2 作为初始点,则
τ
3
tau_3
τ3为
t
t
t 相对于
t
2
t_2
t2时刻的时间,则有:
τ
3
=
t
−
t
2
tau_3 = t - t_2
τ3=t−t2
下面可以得到加速度与时间的关系函数,具体如下:
a
(
t
)
=
{
J
t
,
0
<
t
≤
t
1
a
m
a
x
,
t
1
<
t
≤
t
2
a
m
a
x
−
J
(
t
−
t
2
)
,
t
2
<
t
≤
t
3
0
,
t
3
<
t
≤
t
4
−
J
(
t
−
t
4
)
,
t
4
<
t
≤
t
5
−
a
m
a
x
,
t
5
<
t
≤
t
6
−
a
m
a
x
−
J
(
t
−
t
6
)
,
t
6
<
t
≤
t
7
⋯
②
begin{aligned} a(t)=begin{cases} Jt, & 0<tle t_1 \ a_{max}, & t_1<tle t_2 \ a_{max}-J(t-t_2), & t_2<tle t_3 \ 0,& t_3<tle t_4 \ -J(t-t_4),& t_4<tle t_5 \ -a_{max},& t_5<tle t_6 \ -a_{max}-J(t-t_6),& t_6<tle t_7 end{cases} end{aligned} quad cdots quad②
a(t)=⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧Jt,amax,amax−J(t−t2),0,−J(t−t4),−amax,−amax−J(t−t6),0<t≤t1t1<t≤t2t2<t≤t3t3<t≤t4t4<t≤t5t5<t≤t6t6<t≤t7⋯②
根据 ① 式,将
τ
tau
τ 代入 ② 式可以得到:
a
(
t
)
=
{
J
τ
1
,
0
<
t
≤
t
1
a
m
a
x
,
t
1
<
t
≤
t
2
a
m
a
x
−
J
τ
3
,
t
2
<
t
≤
t
3
0
,
t
3
<
t
≤
t
4
−
J
τ
3
,
t
4
<
t
≤
t
5
−
a
m
a
x
,
t
5
<
t
≤
t
6
−
a
m
a
x
+
J
τ
7
,
t
6
<
t
≤
t
7
begin{aligned} a(t)=begin{cases} Jtau_1, & 0<tle t_1 \ a_{max}, & t_1<tle t_2 \ a_{max}-Jtau_3, & t_2<tle t_3 \ 0,& t_3<tle t_4 \ -Jtau_3,& t_4<tle t_5 \ -a_{max},& t_5<tle t_6 \ -a_{max}+Jtau_7,& t_6<tle t_7 end{cases} end{aligned}
a(t)=⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧Jτ1,amax,amax−Jτ3,0,−Jτ3,−amax,−amax+Jτ7,0<t≤t1t1<t≤t2t2<t≤t3t3<t≤t4t4<t≤t5t5<t≤t6t6<t≤t7
上式中 J > 0 J > 0 J>0;
2.2 速度时间关系方程
速度和加速度满足
v
=
a
t
v=at
v=at ;加加速度和速度的关系满足:
v
=
1
2
J
t
2
v = cfrac{1}{2} Jt^2
v=21Jt2
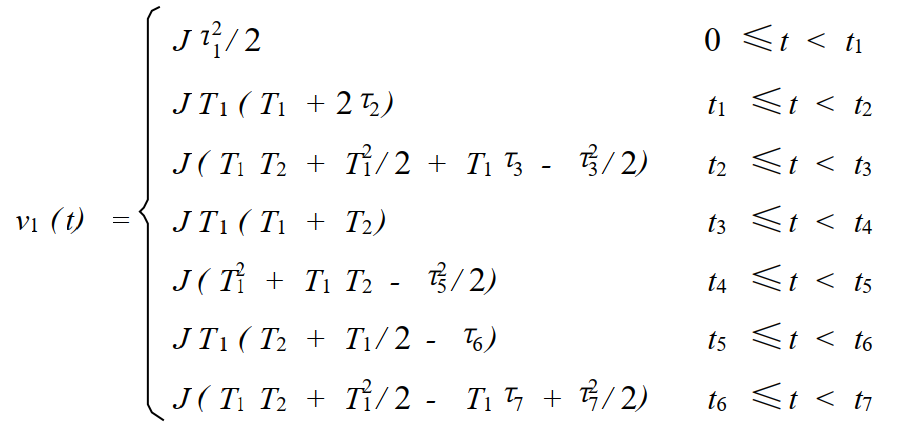
结合加速度时间关系并结合② 式可以得到速度曲线关系,具体关系如下图所示;
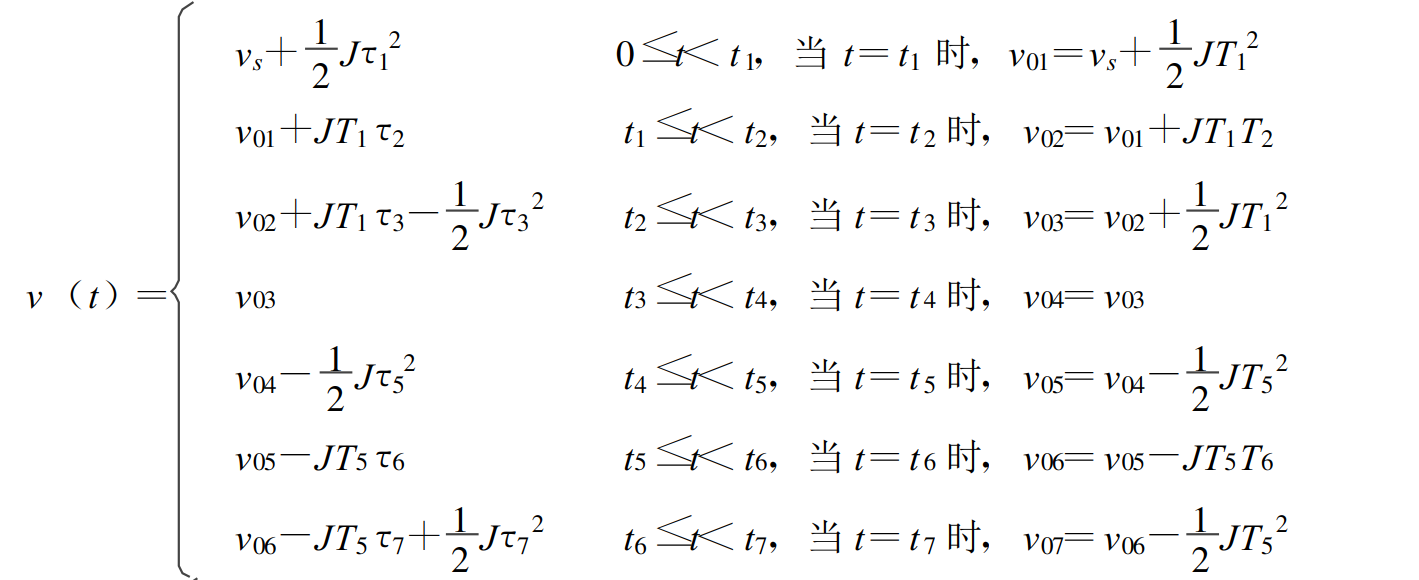
进一步简化可以得到:
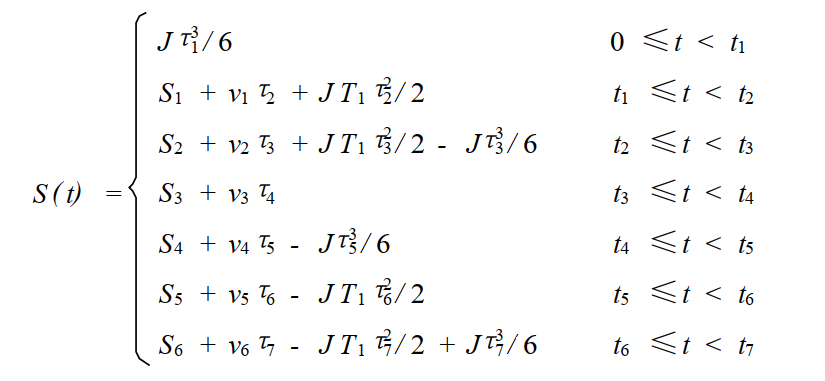
2.3 位移时间关系方程
位移
S
S
S 和加加速度
J
J
J 直接满足关系如下:
S
=
1
6
J
t
3
S = cfrac{1}{6} Jt^3
S=61Jt3
简单推导
{
S
=
∫
0
t
v
d
t
v
=
1
2
J
t
2
begin{cases} S = int_{0}^{t}vdt \ v = cfrac{1}{2} Jt^2 end{cases}
⎩⎨⎧S=∫0tvdtv=21Jt2
因此可以得到:
S
=
∫
0
t
1
2
J
t
2
d
t
=
1
6
J
t
3
∣
0
t
S = int_{0}^{t}cfrac{1}{2}Jt^2dt = cfrac{1}{6}Jt^3|_0^t\
S=∫0t21Jt2dt=61Jt3∣0t
积分忘的差不多了,回去再复习一下;
最终位移的方程如下所示;
3 程序实现的思路
正如前面所提到的,S曲线规划需要确定三个最基本的系统参数 :系统最大速度
v
m
a
x
v_{max}
vmax ,最大加速度a_{max} ,加加速度
J
J
J,这样就可以确定这个运行过程。
这里有一个隐性的条件,就是在运行的过程中可以达到最大速度,这样才是完整的7段S曲线,另外这里还有一些中间参数:
- t m = v m a x a m a x t_m = cfrac{v_{max}}{a_{max}} tm=amaxvmax,因此有 T 1 = T 3 = T 5 = T 7 T_1=T_3=T_5=T_7 T1=T3=T5=T7;
- 加加速度 J = J 1 = J 3 = J 5 = J 7 = a m a x t m J = J_1= J_3= J_5= J_7=cfrac{a_{max}}{t_m} J=J1=J3=J5=J7=tmamax;
- T 2 = T 6 T_2 = T_6 T2=T6;
- T f T_f Tf,用户给定整个运行过程所需要的时间;
但是通常实际过程中关心 a m a x a_{max} amax, v m a x v_{max} vmax, T f T_f Tf;
3.1 T k T_k Tk 推导
理想状态假设存在 T 2 T_2 T2和 T 6 T_6 T6,则推导过程如下:
{ v 1 = 1 2 J T 1 2 v 2 = v 1 + a m a x T 2 v 3 = v 2 + 1 2 J T 3 2 v 3 = v m a x T 1 = T 3 begin{cases} v_1 = cfrac{1}{2}JT_1^2 \ v_2 = v_1 + a_{max}T_2\ v_3 = v_2 + cfrac{1}{2}JT_3^2 \ v_3 = v_{max} \ T_1 = T_3 end{cases} ⎩⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎧v1=21JT12v2=v1+amaxT2v3=v2+21JT32v3=vmaxT1=T3
因此可以得到:
v
m
a
x
=
1
2
J
T
1
2
+
a
m
a
x
T
2
+
1
2
J
T
1
2
v_{max} = cfrac{1}{2}JT_1^2 + a_{max}T_2 +cfrac{1}{2}JT_1^2
vmax=21JT12+amaxT2+21JT12
简化之后得到:
v
m
a
x
=
J
T
1
2
+
a
m
a
x
T
2
v_{max} = JT_1^2 + a_{max}T_2
vmax=JT12+amaxT2
根据②式可知: a m a x = J T 1 a_{max} = JT_1 amax=JT1
最终得到:
T
2
=
T
6
=
V
m
a
x
−
V
s
a
m
a
x
−
T
1
T_2 = T_6 = cfrac{V_{max} - V_s}{a_{max}} - T_1
T2=T6=amaxVmax−Vs−T1
V s 为 初 始 速 度 ; V_s为初始速度; Vs为初始速度;
下面可以根据位移时间关系方程进行离散化的程序编写。
假设可以到达最大速度,且用户给定了整个过程运行时间
T
f
T_f
Tf,则
T
4
T_4
T4 的推导如下:
{
T
f
=
T
1
+
T
2
+
T
3
+
T
4
+
T
5
+
T
6
+
T
7
T
2
=
T
6
T
1
=
T
3
=
T
5
=
T
7
begin{cases} T_f = T_1 + T_2 + T_3 + T_4 + T_5 + T_6 + T_7 \ T_2 = T_6 \ T_1 = T_3 = T_5 = T_7 \ end{cases}
⎩⎪⎨⎪⎧Tf=T1+T2+T3+T4+T5+T6+T7T2=T6T1=T3=T5=T7
简化上式可以得到:
T
4
=
T
f
−
2
T
2
−
4
T
1
T_4 = T_f - 2T_2 - 4T_1
T4=Tf−2T2−4T1
根据
T
1
=
a
m
a
x
J
T_1 = cfrac{a_{max}}{J}
T1=Jamax代入上式可得:
T
4
=
T
f
−
2
v
m
a
x
a
m
a
x
−
2
a
m
a
x
J
T_4 = T_f - 2cfrac{v_{max}}{a_{max}}-2cfrac{a_{max}}{J}
T4=Tf−2amaxvmax−2Jamax
3.2 J J J 的推导
这时候还剩下
J
J
J需要计算,通过已量
T
f
,
v
m
a
x
,
a
m
a
x
T_f,v_{max},a_{max}
Tf,vmax,amax可以推导出来;
首先位移之间满足关系如下:
S
r
e
f
=
S
a
+
S
4
+
S
d
S_{ref} = S_a + S_4 + S_d
Sref=Sa+S4+Sd
其中加速区长度为
S
a
S_a
Sa;
其中减速区长度为
S
d
S_d
Sd;
{
S
a
=
v
s
(
2
T
1
+
T
2
)
+
1
2
J
T
1
(
2
T
1
2
+
3
T
1
T
2
+
T
2
2
)
S
d
=
v
3
(
2
T
5
+
T
6
)
−
1
2
J
T
5
(
2
T
5
2
+
3
T
5
T
6
+
T
6
2
)
begin{cases} S_a = v_s(2T_1 + T_2)+cfrac{1}{2}JT_1(2T_1^2 + 3T_1T_2 + T_2^2) \ S_d = v_3(2T_5 + T_6)-cfrac{1}{2}JT_5(2T_5^2 + 3T_5T_6 + T_6^2) end{cases}
⎩⎪⎨⎪⎧Sa=vs(2T1+T2)+21JT1(2T12+3T1T2+T22)Sd=v3(2T5+T6)−21JT5(2T52+3T5T6+T62)
具体推导;2
前面提到过
T
1
=
T
3
=
T
5
=
T
7
T_1 = T_3 = T_5 = T_7
T1=T3=T5=T7,
T
2
=
T
6
T_2 = T_6
T2=T6,因此在
V
s
V_s
Vs=0的时候,则
S
a
+
S
d
=
v
3
(
2
T
5
+
T
6
)
=
v
3
(
2
T
1
+
T
2
)
⋯
④
S_a + S_d = v_3(2T_5 + T_6) = v_3(2T_1 + T_2) cdots ④
Sa+Sd=v3(2T5+T6)=v3(2T1+T2)⋯④
这里简单推导一下:
{
S
4
=
v
4
T
4
T
4
=
T
f
−
(
T
1
+
T
2
+
T
3
+
T
4
+
T
5
+
T
6
)
T
1
=
T
3
=
T
5
=
T
7
=
a
m
a
x
J
T
2
=
T
6
=
V
m
a
x
a
m
a
x
−
T
1
v
3
=
V
m
a
x
S
r
e
f
=
S
a
+
S
4
+
S
d
⋯
⑤
begin{cases} S_4 = v_4T_4 \ T_4 = T_f - (T_1 + T_2 + T_3 + T_4 + T_5 + T_6) \ T_1 = T_3 = T_5 = T_7 = cfrac{a_{max}}{J} \ T_2 = T_6 = cfrac{V_{max}}{a_{max}} - T_1 \ v_3 = V_{max}\ S_{ref} = S_a + S_4 + S_d end{cases} cdots ⑤
⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧S4=v4T4T4=Tf−(T1+T2+T3+T4+T5+T6)T1=T3=T5=T7=JamaxT2=T6=amaxVmax−T1v3=VmaxSref=Sa+S4+Sd⋯⑤
根据④,⑤最终简化得到:
J
=
a
m
a
x
2
v
m
a
x
v
m
a
x
a
m
a
x
T
f
−
v
m
a
x
2
−
S
r
e
f
a
m
a
x
J = cfrac{a_{max}^2v_{max}}{v_{max}a_{max}T_f-v_{max}^2-S_{ref}a_{max}}
J=vmaxamaxTf−vmax2−Srefamaxamax2vmax
T f T_f Tf:为运行的总时间
S r e f S_{ref} Sref:为运行的总路程
详细推导过程如下:
S
r
e
f
=
S
a
+
S
4
+
S
d
=
S
4
+
v
3
(
2
T
1
+
T
2
)
S_{ref} = S_a + S_4 + S_d = S_4 + v_3(2T_1 + T_2)
Sref=Sa+S4+Sd=S4+v3(2T1+T2)
因为:
v
3
(
2
T
1
+
T
2
)
=
v
m
a
x
(
2
T
1
+
T
2
)
v_3(2T_1 + T_2) =v_{max}(2T_1 + T_2)
v3(2T1+T2)=vmax(2T1+T2)
因为:
T
2
=
T
6
=
V
m
a
x
−
V
s
a
m
a
x
−
T
1
T
1
=
T
3
=
T
5
=
T
7
=
a
m
a
x
J
V
s
=
0
T_2 = T_6 = cfrac{V_{max} - V_s}{a_{max}} - T_1 \ T_1 = T_3 = T_5 = T_7 = cfrac{a_{max}}{J} \ V_s = 0
T2=T6=amaxVmax−Vs−T1T1=T3=T5=T7=JamaxVs=0
所以,简化得到:
v
3
(
2
T
1
+
T
2
)
=
v
m
a
x
(
v
m
a
x
a
m
a
x
+
a
m
a
x
J
)
v_3(2T_1 + T_2) =v_{max}(cfrac{v_{max}}{a_{max}} + cfrac{a_{max}}{J})
v3(2T1+T2)=vmax(amaxvmax+Jamax)
所以可以得到:
S
r
e
f
=
S
4
+
v
m
a
x
(
v
m
a
x
a
m
a
x
+
a
m
a
x
J
)
S
r
e
f
=
v
m
a
x
T
4
+
v
m
a
x
(
v
m
a
x
a
m
a
x
+
a
m
a
x
J
)
S_{ref} = S_4 + v_{max}(cfrac{v_{max}}{a_{max}} + cfrac{a_{max}}{J}) \ \ S_{ref} = v_{max}T_4 + v_{max}(cfrac{v_{max}}{a_{max}} + cfrac{a_{max}}{J})
Sref=S4+vmax(amaxvmax+Jamax)Sref=vmaxT4+vmax(amaxvmax+Jamax)
因为:
T
4
=
T
f
−
2
v
m
a
x
a
m
a
x
−
2
a
m
a
x
J
T_4 = T_f - 2cfrac{v_{max}}{a_{max}}-2cfrac{a_{max}}{J}
T4=Tf−2amaxvmax−2Jamax
将其代入可以得到:
S
r
e
f
=
v
m
a
x
(
T
f
−
2
v
m
a
x
a
m
a
x
−
2
a
m
a
x
J
)
+
v
m
a
x
(
v
m
a
x
a
m
a
x
+
a
m
a
x
J
)
S_{ref} = v_{max}( T_f - 2cfrac{v_{max}}{a_{max}}-2cfrac{a_{max}}{J}) + v_{max}(cfrac{v_{max}}{a_{max}} + cfrac{a_{max}}{J})
Sref=vmax(Tf−2amaxvmax−2Jamax)+vmax(amaxvmax+Jamax)
简化得到最终结果:
J
=
a
m
a
x
2
v
m
a
x
v
m
a
x
a
m
a
x
T
f
−
v
m
a
x
2
−
S
r
e
f
a
m
a
x
J = cfrac{a_{max}^2v_{max}}{v_{max}a_{max}T_f-v_{max}^2-S_{ref}a_{max}}
J=vmaxamaxTf−vmax2−Srefamaxamax2vmax
4 matlab 程序
matlab程序亲测可以运行,做了简单的修改,
因为这里直接给定了整个运行过程的时间,所以需要在SCurvePara函数中求出加加速度
J
J
J 的值,路程
S
S
S为 1:
SCurvePara
function [Tf1,V,A,J,T] = SCurvePara(Tf, v, a)
T = zeros(1,7);
for i=1:1000
% 加加速度 J
J = (a^2 * v) / (Tf*v*a - v^2 - a);
% Tk
T(1) = a / J;
T(2) = v / a - a / J; % t2 = v / a - t1;
T(3) = T(1);
T(4) = Tf - 2 * a / J - 2 * v / a; % t4 = Tf - 4*t1 - 2*t2;
T(5) = T(3);
T(6) = T(2);
T(7) = T(1);
% 根据T2和T4判断S曲线的类型
if T(2) < -1e-6
a = sqrt(v*J);
display('t2<0');
elseif T(4) < -1e-6
v = Tf*a/2 - a*a/J;
display('t4<0');
elseif J < -1e-6
Tf = (v^2 + a) / (v*a) + 1e-1;
display('J<0');
else
break;
end
end
A = a;
V = v;
Tf1 = Tf;
end
SCurveScaling
function s = SCurveScaling(t,V,A,J,T,Tf)
% J = (A^2 * V) / (Tf*V*A - V^2 - A);
% T(1) = A / J;
% T(2) = V / A - A / J; % T(2) = V / A - T(1);
% T(3) = T(1);
% T(4) = Tf - 2 * A / J - 2 * V / A; % T(4) = Tf - 4*T(1) - 2*T(2);
% T(5) = T(3);
% T(6) = T(2);
% T(7) = T(1);
%%
if (t >= 0 && t <= T(1))
s = 1/6 * J * t^3;
elseif ( t > T(1) && t <= T(1)+T(2) )
dt = t - T(1);
s = 1/2 * A * dt^2 + A^2/(2*J) * dt...
+ A^3/(6*J^2);
elseif ( t > T(1)+T(2) && t <= T(1)+T(2)+T(3) )
dt = t - T(1) - T(2);
s = -1/6*J*dt^3 + 1/2*A*dt^2 + (A*T(2) + A^2/(2*J))*dt ...
+ 1/2*A*T(2)^2 + A^2/(2*J)*T(2) + A^3/(6*J^2);
elseif ( t > T(1)+T(2)+T(3) && t <= T(1)+T(2)+T(3)+T(4) )
dt = t - T(1) - T(2) - T(3);
s = V*dt ...
+ (-1/6*J*T(3)^3) + 1/2*A*T(3)^2 + (A*T(2) + A^2/(2*J))*T(3) + 1/2*A*T(2)^2 + A^2/(2*J)*T(2) + A^3/(6*J^2);
elseif ( t > T(1)+T(2)+T(3)+T(4) && t <= T(1)+T(2)+T(3)+T(4)+T(5) )
t_temp = Tf - t;
dt = t_temp - T(1) - T(2);
s = -1/6*J*dt^3 + 1/2*A*dt^2 + (A*T(2) + A^2/(2*J))*dt ...
+ 1/2*A*T(2)^2 + A^2/(2*J)*T(2) + A^3/(6*J^2);
s = 1 - s;
elseif ( t > T(1)+T(2)+T(3)+T(4)+T(5) && t <= T(1)+T(2)+T(3)+T(4)+T(5)+T(6) )
t_temp = Tf - t;
dt = t_temp - T(1);
s = 1/2 * A * dt^2 + A^2/(2*J) * dt + A^3/(6*J^2);
s = 1 - s;
elseif ( t > T(1)+T(2)+T(3)+T(4)+T(5)+T(6) && t <= T(1)+T(2)+T(3)+T(4)+T(5)+T(6)+T(7) + 1e5 )
t_temp = Tf - t;
s = 1/6 * J * t_temp^3;
s = 1 - s;
end
end
测试的代码如下:
TEST
%%
N = 500;
ThetaStart = 0; %起始位置
ThetaEnd = 90; %最终位置
VTheta = 90; %1 速度
ATheta = 135; %1.5 加速度
Tf = 1.8; % 总行程时间
v = VTheta/(ThetaEnd - ThetaStart);
a = ATheta/(ThetaEnd - ThetaStart);
v = abs(v);
a = abs(a);
Theta = zeros(1,N);
s = zeros(1,N);
sd = zeros(1,N);
sdd = zeros(1,N);
[TF,V,A,J,T] = SCurvePara(Tf, v, a);
display(J, 'J:');
display(TF,'Tf:');
display(V,'v:');
display(A, 'da:');
display(TF-Tf,'dTf:');
display(V-v,'dv:');
display(A-a, 'da:');
t=linspace(0,TF,N);
dt = t(2) - t(1);
for i = 1:N
if i == N
a = a;
end
s(i) = SCurveScaling(t(i),V,A,J,T,TF);
Theta(i) = ThetaStart + s(i) * (ThetaEnd - ThetaStart);
if i>1
sd(i-1) = (s(i) - s(i-1)) / dt;
end
if i>2
sdd(i-2) = (sd(i-1) - sd(i-2)) / dt;
end
end
subplot(3,1,1);
legend('Theta');
xlabel('t');
subplot(3,1,1);
plot(t,s)
legend('位移');
xlabel('t');
title('位置曲线');
subplot(3,1,2);
plot(t,sd);
legend('速度');
xlabel('t');
title('速度曲线');
subplot(3,1,3);
plot(t,sdd);
legend('加速度');
xlabel('t');
title('加速度曲线');
看到最终仿真结果和预期相同;
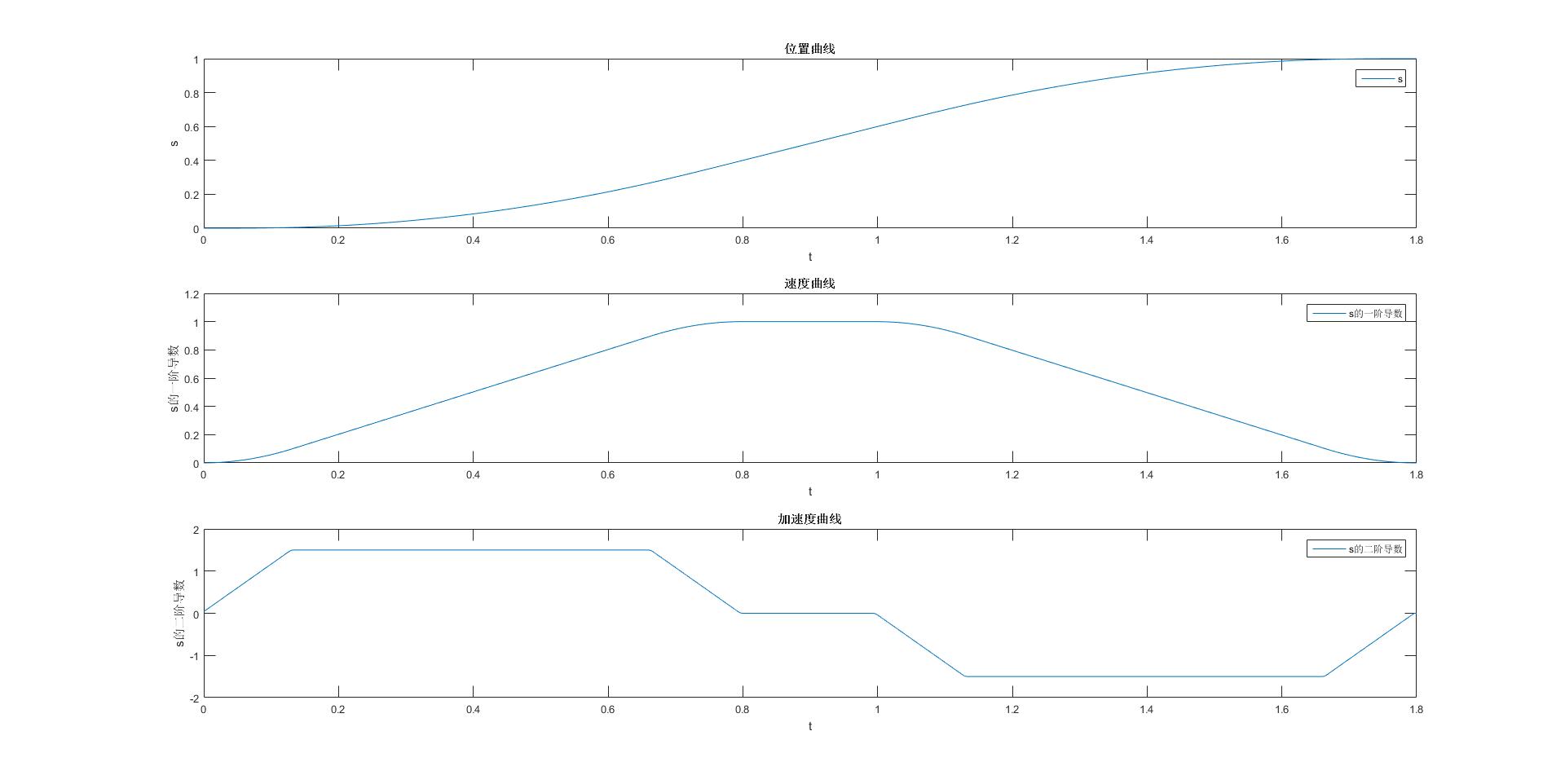
5 总结
本文只对7段的S曲线规划做了详细的推导和介绍,matlab中的程序对于4段和5段都有做实现,很多是在理想情况下进行推导的,初始速度默认为0,终止速度也为0,并且假设加减速区域相互对称。最终运行结果符合预期效果。
文中难免有错误和纰漏之处,请大佬们不吝赐教
创作不易,如果本文帮到了您;
请帮忙点个赞 ????????????;
请帮忙点个赞 ????????????;
请帮忙点个赞 ????????????;
6 参考
陈友东 魏洪兴 王琦魁.数控系统的直线和 S 形加减速离散算法[D].北京:中国机械工程,2010. ↩︎
郭新贵 李从心 S 曲线加减速算法研究 上海交通大学国家模具 CAD 工程研究中心 , 200030 ↩︎ ↩︎
最后
以上就是纯情墨镜最近收集整理的关于一文教你快速搞懂速度曲线规划之S形曲线(超详细+图文+推导+附件代码)的全部内容,更多相关一文教你快速搞懂速度曲线规划之S形曲线(超详细+图文+推导+附件代码)内容请搜索靠谱客的其他文章。








发表评论 取消回复